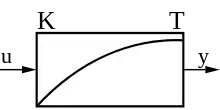
PT1-Glied
Als PT1-Glied bezeichnet man ein LZI-Übertragungsglied in der Regelungstechnik, welches ein proportionales Übertragungsverhalten mit Verzögerung 1. Ordnung aufweist. Ein gebräuchliches Beispiel ist in der Elektrotechnik der Tiefpass (1. Ordnung), der beispielsweise durch ein RC-Glied realisiert werden kann.[1]
Beispiel für eine Verzögerung 1. Ordnung wäre außerhalb der Regelungstechnik ein Reifen, dessen Seitenkraft verzögert auf eine Änderung des Schräglaufwinkels erfolgt.
Übertragungsfunktion
Das PT1-Glied wird durch die lineare Differentialgleichung wie folgt beschrieben:

Durch Laplace-Transformation erhält man die zugehörige komplexe Übertragungsfunktion:

Hierbei bezeichnet K, K > 0, die Übertragungskonstante bzw. den Verstärkungsfaktor und T , T > 0, die Zeitkonstante. Für T < 0 hätte das System ein exponentiell aufklingendes Verhalten.
Bodediagramm
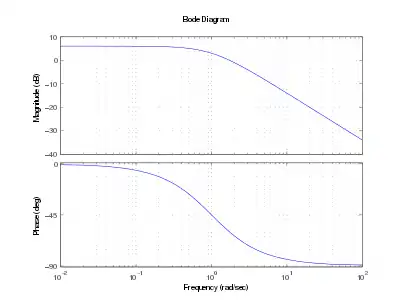
Beim PT1-Glied ist der Frequenzgang. Daher gilt für den Amplituden- und Phasengang im Bodediagramm:[2]



Amplitudengang
Bezeichnet die Knick- bzw. Eckkreisfrequenz, so lässt sich der Amplitudengang grob in zwei Bereiche einteilen:


bzw. logarithmiert, in Dezibel:

Für Kreisfrequenzen unterhalb der Eckkreisfrequenz liegt die Betragskennlinie des PT1-Gliedes parallel zur 0-dB-Linie im Abstand von KdB und für große Kreisfrequenzen fällt sie mit 20 dB/Dekade. Bei der Knickkreisfrequenz ω = ω0 schneiden sich die beiden Asymptoten. Der tatsächliche Wert des Amplitudenganges weicht dort um −3 dB von der asymptotischen Näherung ab. Bei ω = 0,5 ω0 bzw. ω = 2 ω0 beträgt die Abweichung nur noch −1 dB.
Die Eckkreisfrequenz berechnet sich aus der Polstelle der Übertragungsfunktion, also der Nullstelle des Nenners 1 + Ts. Die Polstelle ist und heißt Eigenwert, dessen Betrag die Eckkreisfrequenz ω0 beschreibt.

Phasengang
Die Phasenverschiebung des PT1-Gliedes beträgt bei kleinen Kreisfrequenzen 0°, bei großen Kreisfrequenzen −90° und bei der Knickkreisfrequenz ω0 −45°.
Für die asymptotische Näherung zeichnet man eine Gerade, die eine Dekade vor der Knickkreisfrequenz bei 0° beginnt und eine Dekade nach der Knickkreisfrequenz bei −90° endet.
Sprungantwort
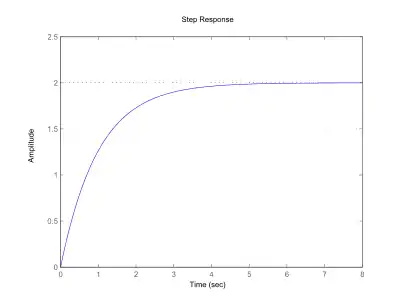
Die Sprungantwort des PT1-Gliedes ergibt sich durch Integration der Impulsantwort. Im Bildbereich:

Durch die inverse Laplace-Transformation erhält man die Zeitfunktion:

Sie hat den Verlauf einer e-Funktion, die sich dem Endwert K annähert. Nach der Zeit t = T beträgt der Wert 0,63 K und nach t = 3 T bereits 0,95 K, es bleibt theoretisch aber immer eine minimale Abweichung vom Endwert erhalten. Die Tangente zum Zeitpunkt Null schneidet den Wert des Verstärkungsfaktors K nach der Zeit T.
Ortskurve
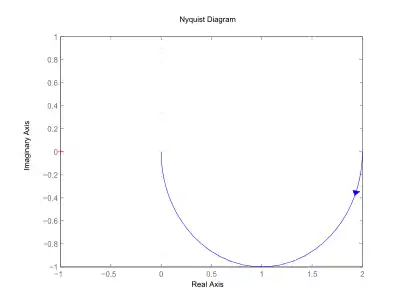
Die Ortskurve () des PT1-Gliedes verläuft vom Punkt K auf der positiven reellen Achse durch den vierten Quadranten für in den Punkt 0.



Komplex konjugiertes Erweitern liefert:

sodass sich Real- und Imaginärteil explizit darstellen lässt:
- und


Damit errechnet sich Betrag und Phase:
- sowie


Die Extremwerte ergeben sich folgendermaßen:








Zeitdiskretes PT1-Glied
Zur numerischen Berechnung einer Differenzialgleichung mit konstanten Koeffizienten werden Differenzengleichungen eingesetzt.
Eine Differenzengleichung ist eine numerisch lösbare rekursive Berechnungsvorschrift für eine diskret definierte Folge von nummerierten Folgeelementen bzw. Stützstellen im Abstand eines meist konstanten Intervalls oder bei zeitabhängigen Systemen . Die Indizierung der Variablen erfolgt über .





Die Differenzengleichung entsteht z. B., wenn der Differenzialquotient einer zu berechnenden linearen Differenzialgleichung durch einen Differenzenquotient ausgetauscht wird. Durch diesen Vorgang entsteht automatisch das rekursive Verhalten der Differenzengleichung, bei der sich entsprechend der Ordnung jedes aktuelle Folgeelement sich auf ein zurückliegendes Folgeelemente bezieht.

Das PT1-Glied wird durch die lineare Differentialgleichung in der Zeitkonstantendarstellung wie folgt beschrieben:
- Hierbei ist K der Verstärkungsfaktor, T die Zeitkonstante, der Eingangssprung.


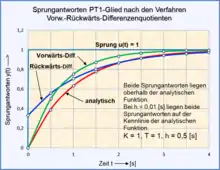
- Beispiel der Herleitung einer Differenzengleichung für ein PT1-Glied mit dem Vorwärts-Differenzenquotienten:
- Der Differenzialquotient der Differenzialgleichung des PT1-Gliedes wird durch den Differenzenquotient ersetzt mit folgendem Ansatz:

- Diese Gleichung wird nach aufgelöst.


- Die Differenzengleichung des PT1-Gliedes lautet mit dem Vorwärts-Differenzenquotienten (entspricht auch Euler-Vorwärts):

- Beispiel der Herleitung einer Differenzengleichung für ein PT1-Glied mit dem Rückwärts-Differenzenquotienten:
- Der Differenzialquotient der Differenzialgleichung des PT1-Gliedes wird durch den Differenzenquotient ersetzt mit folgendem Ansatz:

- Diese Gleichung wird nach aufgelöst.

- Die Differenzengleichung des PT1-Gliedes lautet mit dem Rückwärts-Differenzenquotienten:

- Differenzengleichung des PT1-Gliedes in vereinfachter Schreibweise mit identischer mathematischer Funktion:

- Die Anzahl der Folgeelemente errechnet sich für die Ausgangsgröße im Zeitbereich : .



- Mit fallender Größe der Schrittweite fällt der Approximationsfehler proportional.

Siehe Artikel Differenzenquotient

Siehe ausführliche Details mit Anwendung Differenzengleichung (Differenzenverfahren)
Siehe auch
Einzelnachweise
- Heinz Unbehauen: Regelungstechnik I: Klassische Verfahren zur Analyse und Synthese linearer ... 15. Auflage. Vieweg+Teubner, 2008, ISBN 978-3-8348-0497-6, S. 92 (eingeschränkte Vorschau in der Google-Buchsuche).
- Ekbert Hering, Klaus Bressler, Jürgen Gutekunst: Elektronik für Ingenieure und Naturwissenschaftler. 6. Auflage. Springer Vieweg, 2014, ISBN 978-3-642-05498-3, S. 502 (eingeschränkte Vorschau in der Google-Buchsuche).