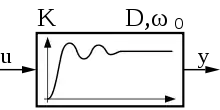
PT2-Glied
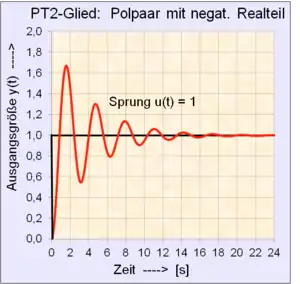
Als PT2-Glied bezeichnet man ein LZI-Übertragungsglied in der Regelungstechnik, welches ein proportionales Übertragungsverhalten mit einer Verzögerung 2. Ordnung aufweist. Bedingt durch seine konjugiert komplexen Pole antwortet das PT2-Glied (auch -Glied bezeichnet) gegenüber einer Eingangssignal-Änderung mit einem oszillatorisch gedämpften Ausgangssignal.

Der Dämpfungsgrad bestimmt mit dem Zeitverhalten die Schwingeigenschaften des Systems. Bei einem Dämpfungsgrad lässt sich das PT2-Glied in zwei PT1-Glieder zerlegen. Bei einem Dämpfungsgrad entsteht Instabilität mit steigenden Schwingamplituden.



Schwingfähige lineare Übertragungsglieder entstehen durch Energieaustausch seiner verkoppelten Einzelelemente. Besteht ein Regelkreis mit einer Regelstrecke aus zwei -Gliedern und einer P-Verstärkung von ca. entsteht bereits nach einer Eingangserregung ein gedämpft schwingendes Ausgangsverhalten.


In der Regelungstechnik ist ein schwaches Überschwingverhalten eines Regelkreises in der Größenordnung von ca. 10 % des Sollwertes häufig erwünscht, weil die Regelgröße schneller den Sollwert erreicht.
Differentialgleichung und Übertragungsfunktion
Gebräuchliche Beispiele eines PT2-Gliedes sind in der Elektrotechnik der R-L-C-Schwingkreis und im Maschinenbau das gedämpfte Federmassependel.
Die allgemeine Form der zugehörigen Differentialgleichung mit der Eingangsvariable und der Ausgangsvariable lautet in den verschiedenen Schreibweisen:


- [1].

- und sind die Koeffizienten (Gewichte) der Differentialglieder.


Wird die Differentialgleichung eines Übertragungssystems mittels des Laplace-Differentiationssatzes in den s-Bereich (auch Bildbereich) transformiert, entsteht aus einer linearen Differentialgleichung mit konstanten Koeffizienten die Übertragungsfunktion als eine rational gebrochene Funktion in Polynom-Darstellung. Sie ist ein wichtiges mathematisches Hilfsmittel zur Lösung von Differentialgleichungen.

Laplace-Transformation der oben genannten Differentialgleichung:
- .

Die Übertragungsfunktion ist definiert als das Verhältnis des Ausgangssignals zum Eingangssignal eines Systems als Funktion der komplexen Frequenz :




Die Übertragungsfunktion wird in eine Normalform des -Gliedes gebracht, indem alle Terme durch dividiert werden. Der Term wird gleichgesetzt.




Damit entsteht die Normalform der Übertragungsfunktion des -Schwingungsgliedes mit als Eigenkreisfrequenz:


oder mit :


Hierbei bezeichnet:
- die Übertragungskonstante bzw. den Verstärkungsfaktor,


- die dimensionslose Dämpfung (der Dämpfungsgrad). Häufig wird auch für Dämpfung verwendet.


- ist die unabhängige Laplace-Variable im komplexen Frequenzbereich (Bildbereich, s-Bereich) mit als Realteil[2] und als Imaginärteil. Sie erlaubt beliebige algebraische Operationen im s-Bereich, ist aber nur ein Symbol für eine vollzogene Laplace-Transformation und enthält keinen Zahlenwert. Exponenten von s entsprechen dem Grad der Ableitung der Differentiale.



Bestimmung der Pole
Die Nullstellen des Nennerpolynoms (= Pole) einer Übertragungsfunktion bestimmen ausschließlich das Zeitverhalten eines Übertragungssystems.
Die Pole bewirken folgendes globales Systemverhalten:
- Pol reell,

- Die Sprungantwort eines Übertragungssystems höherer Ordnung mit nur reellen Polen hat ein globales asymptotisches Systemverhalten. Es enthält lauter -Glieder.
- Pole konjugiert komplex, . Unter Konjugation versteht man in der s-Ebene einen um die reelle Achse gespiegelten Doppelpol. Bei -Gliedern mit Schwinganteilen sind die Pole konjugiert komplex.

- Die Sprungantwort eines Übertragungssystems höherer Ordnung mit nur einem konjugiert komplexen Doppelpol hat ein globales gedämpftes Schwingverhalten.
- Pol entspricht einem fehlenden Abschlussglied der Übertragungsfunktion. Koeffizient


- Die Sprungantwort eines Übertragungssystems höherer Ordnung ohne Abschlussglied bildet die Teilübertragungsfunktion und bewirkt ein globales integrales Systemverhalten.

Sind die Realteile von Nullstellen und Polstellen negativ, handelt es sich um ein stabiles System. Negative Realteile der Pole bedeuten asymptotische Stabilität des Teilsystems.
Die Pole (Nullstellen des Nennerpolynoms) lassen sich nun bestimmen, indem das Nennerpolynom der Übertragungsfunktion gleich Null gesetzt wird.
Sind Zahlenwerte einer Übertragungsfunktion in der Polynomdarstellung gegeben, können mit verschiedenen Methoden, wie mit der pq-Formel, die Pole für Systeme zweiter Ordnung bestimmt werden. Im Internet stehen verfügbare Programme bis 4. Ordnung mit dem Aufruf „Nullstellen (Lösungen) von Polynomen bestimmen“ zur Verfügung.
Für Systeme mit Polynomen 2. Ordnung der Form errechnen sich die Nullstellen bzw. die Pole:

- .

Bestimmung der Kreisfrequenz des -Gliedes
Man unterscheidet bei gedämpften und ungedämpften Übertragungssystemen:
- = Kennkreisfrequenz des ungedämpften Übertragungssystems.
- = Eigenkreisfrequenz des gedämpften Übertragungssystems.
- Die Eigenkreisfrequenz eines gedämpften Übertragungssystems und deren Schwingamplituden sind stets kleiner als die Kennkreisfrequenz und deren Schwingamplituden des ungedämpften -Gliedes.


Aus der Normalform der Übertragungsfunktion eines gedämpften -Gliedes kann die Kennkreisfrequenz aus dem Koeffizienten gebildet werden.


Bei einer gegebenen Übertragungsfunktion sind die Koeffizienten wie auch je Zahlenwerte.[3]

Aus dem Koeffizienten wird die Kennkreisfrequenz des dämpfungslosen Systems bestimmt.

- .

Aus dem Zahlenwert des Koeffizienten für wird die Dämpfung errechnet.
Mit steigendem Dämpfungswert verringert sich die Schwingfrequenz und die Amplitude der Systemantwort (Übergangsfunktion). Bei geht die gedämpfte Schwingung in einen aperiodischen Verlauf zweiter Ordnung bzw. bei weiter steigendem in einen Kriechfall über.


Die Eigenkreisfrequenz des gedämpft schwingenden System wird bestimmt durch:

Die Schwingfrequenz des gedämpften Systems lautet:


Die Periodendauer des gedämpft schwingenden Systems lautet:


Bestimmung der Übertragungsfunktion eines -Gliedes aus einer gegebenen graphischen Darstellung der Sprungantwort
Stabiles schwingfähiges System

Ist die Sprungantwort dieses Systems grafisch gegeben, kann die Übertragungsfunktion des -Gliedes (Schwingungsglied) aus dem Amplitudenverhältnis der zwei ersten Halbwellen errechnet werden.
Mit wird die Amplitude in positiver Richtung und mit die Amplitude in negativer Richtung der ersten Schwingung bezeichnet.


Zunächst wird die Dämpfung der Schwingung berechnet:

Der Koeffizient errechnet sich aus der Periodendauer der 1. Schwingung und aus der Dämpfung :



Damit ergibt sich die Übertragungsfunktion mit den errechneten Werten von , und zu:


Anwendungsbeispiel zur Bestimmung der Parameter eines -Gliedes
Gegeben Übertragungsfunktion mit Nennerpolynom für
Gesucht: Pole, Dämpfung, EigenKreisfrequenzen , , Periodendauer .
- Polynom: ,
- ,
Ergebnis: Das -Glied lässt sich nicht in weitere -Glieder zerlegen.
Ermittlung der Dämpfung :
- Durch Faktorenvergleich aus der gegebenen Normalform der Übertragungsfunktion ergibt sich die Beziehung:
- .
- .
Bestimmung der gedämpften Eigenkreisfrequenz nach einem Eingangssprung :
Die ungedämpfte Kennkreisfrequenz der Sprungantwort des -Gliedes lautet:
- .
Die gedämpfte Eigenkreisfrequenz der Sprungantwort des -Gliedes lautet:
Die Schwingfrequenz des gedämpften Systems lautet:
Die Periodendauer der gedämpften Schwingung lautet:
Ergebnis: Siehe Periodendauer der Grafik! Bei schwacher Dämpfung sind und ähnlich.
Bestimmung der Übertragungsfunktion für reelle Pole :
- Gegeben: Übertragungsfunktion
- Gesucht: Zerlegung in weitere -Glieder:
- Polynom:
- .
Das zu Null gesetzte Polynom wurde oben durch den Faktor dividiert und muss berücksichtigt werden.
Übertragungsfunktion in Pol-Darstellung und Zeitkonstanten-Darstellung:


















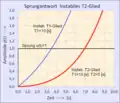
Stabiles nicht schwingfähiges -System,
Zur Identifikation der Zeitkonstanten und Verstärkung eines nicht schwingenden -Systems bieten sich mehrere Verfahren an:
- Identifikation über die Impulsantwort für Übertragungssysteme beliebiger Ordnung, siehe Artikel Regelstrecke
- Zeit-Prozent-Kennwert-Verfahren (Schwarze) nach der Sprungantwort mit Zeitwerten von [Prozent]. Dieses Verfahren gilt auch für nichtschwingende Übertragungsglieder höherer Ordnung. Siehe Artikel Regelstrecke
- Falls ein selbst erstelltes oder kommerzielles Rechenprogramm für grafische Sprungantworten vorliegt: empirische Lösung durch Versuch und Irrtum.

Das folgende Verfahren und die Gleichungen wurden durch numerische Simulation und der Optimierung von Funktionen bestimmt.[4]
Vorgehensweise:
.png.webp)




- Messung der Sprungantwort des Systems mit dem Eingangssprung und der Sprungantwort des Systems .
- Bestimme die Zeiten und ausgehend vom Sprungzeitpunkt bis zu dem Zeitpunkt, wo die Sprungantwort bzw. vom stationären Ausgangswert erreicht hat.
- Bestimme die stationäre Verstärkung
- Berechne folgende Zwischengrößen:







- Berechne die beiden Zeitkonstanten und mit




- Darstellung der identifizierten Übertragungsfunktion

Berechnungsbeispiel der Identifizierung einer Übertragungsfunktion aus der Sprungantwort:
- Ablesung der Daten aus dem y(t)-Diagramm
- Anhand der Gleichungen ergibt sich für:
- Errechnete Zeitkonstanten: .



Anmerkung: Durch eine genaue numerische Berechnung (Auflösung ) der Sprungantwort eines -Gliedes wurde festgestellt, dass vorgegebene Soll-Zeitkonstanten nicht genau mit den errechneten Zeitkonstanten (Abweichung ca. 6 %) übereinstimmt, dennoch ein brauchbares Ergebnis brachten.



Die Ursache: Das Ergebnis der berechneten Zeitkonstanten ist offensichtlich eine gute Annäherung an die tatsächliche Funktion der Sprungantwort. Es wurde empirisch festgestellt, dass in einem Bereich von maximal % der kleineren Zeitkonstante die Beziehung der Soll-Zeitkonstanten zu den errechneten Zeitkonstanten gilt:

- Gilt für einen Bereich von maximal % der kleineren Zeitkonstante .

Daraus lässt sich beispielsweise für die dargestellte Grafik ableiten, dass die vermutete ursprüngliche Übertragungsfunktion wie folgt lautete:
- .

In der grafischen Darstellung der Sprungantworten in einem Diagramm 10 * 10 [cm] ist der Verlauf der beiden Funktionen praktisch deckungsgleich. Die unnötige hohe Stellenzahl (bis 7 Ziffern einschließlich Dezimalstellen) der Faktoren (Konstanten) kann auf 4 Ziffern einschließlich der Dezimalstellen begrenzt werden, ohne dass sich am Ergebnis der Zeitkonstanten etwas ändern würde.
Methoden der Berechnung des Zeitverhaltens von Übertragungsgliedern
- Lösung aus der gewöhnlichen Differentialgleichung bis maximal zweiter Ordnung (sehr umständlich).
- Lösung aus der Übertragungsfunktion:
- durch Partialbruchzerlegung in einfache additive Terme, die sich leicht in den Zeitbereich transformieren lassen.
- durch Anwendung von Laplace-Transformationstabellen, welche die korrespondierenden Gleichungen im Zeitbereich enthalten.
- Anmerkung: enthält ein Übertragungssystem Schwingungsanteile, ergeben sich laut Transformationstabellen aufwendige trigonometrische Gleichungen.
- Benutzung fertiger kommerzieller Programme, wie Matlab und Simulink.
- Umwandlung von gewöhnlichen Differentialgleichungen eines Übertragungssystems in Differenzengleichungen, die sich tabellarisch leicht lösen lassen.
Die Berechnung des Zeitverhaltens eines -Gliedes aus der Übertragungsfunktion wird üblicherweise für normierte Eingangssignale durchgeführt. Zur Berechnung der Sprungantwort mit dem Eingangssignal wird der Übertragungsfunktion der Term multiplikativ angehängt. Wird letzteres nicht durchgeführt, erhält man an Stelle der Sprungantwort die Impulsantwort.


Berechnung der Sprungantwort eines -Gliedes im Zeitbereich
Die in jedem guten Fachbuch der Regelungstechnik dargestellten wichtigsten Laplace-Transformationstabellen erlauben die Berechnung des Zeitverhaltens eines Übertragungssystems für eine gegebene Übertragungsfunktion .
Die Korrespondenz-Tabellen enthalten für die nachfolgend dargestellten definierten Formen der Eingangssignale die zugehörigen Gleichungen zur Berechnung des Ausgangssignals im Zeitbereich . Um die Gleichung zur Berechnung das Zeitverhaltens des Übertragungssystems zu bestimmen, muss die gegebene Übertragungsfunktion mit der Art des Eingangssignals multipliziert werden.
Folgende normierte Laplace-transformierte Eingangssignale lauten:
- Impulsfunktion: .
- Einheitssprung, Sprungfunktion: .
- Anstiegsfunktion .
- Sinusfunktion .




Für die Bestimmung des Zeitverhaltens eines -Gliedes lautet die in der Transformationstabelle zu suchende Form der Gleichung:
- .

- .

Die Laplace-Rücktransformation in den Zeitbereich mit Hilfe von Laplace-Transformationstabellen erfolgt mit der gesuchten Funktion , multipliziert mit dem gewünschten Eingangssignal .
Für den Einheitssprung auf das -Glied gilt:

oder

Fallunterscheidung der Sprungantwort nach dem Dämpfungsgrad

- Für : Das System antwortet mit einer konstanten Dauerschwingung um den Wert der Verstärkung . Damit verschwindet der Term in der Übertragungsfunktion und die Gleichung für die Berechnung des Zeitverhaltens vereinfacht sich.
- Für vereinfacht sich die Gleichung zur Berechnung des Zeitverhaltens, weil das Übertragungsverhalten durch zwei -Glieder der Übertragungsfunktion bestimmt wird.


- Bei sind die Zeitkonstanten der Übertragungsfunktion .

- Für ergibt sich ein konjugiert komplexer Doppelpol mit positivem Realteil. Der Term wird negativ. Das Übertragungsglied antwortet mit instabilen zunehmend steigenden Amplituden.
- Anmerkung: Die instabilen Verzögerungsglieder, fälschlicherweise instabile -Glieder genannt, haben kein proportionales Verhalten. Man kann sie als Instabile -Glieder bezeichnen.
Zeitverhalten der Sprungantwort eines -Gliedes als Funktion der Dämpfung
Je nach gegebenen Zahlenwerten einer Übertragungsfunktion G(s) ergeben sich unterschiedliche Darstellungen des Systemzeitverhaltens.
- .

- Liegen die Zahlenwerte einer Übertragungsfunktion in Polynomdarstellung vor, lassen sich die 2 Pole des Nennerpolynoms bestimmen. Sind sie negativ und reell lassen sich die Zeitkonstanten errechnen.
- Sind die Pole konjugiert komplex mit negativem Realteil, lässt sich das System nicht in -Glieder aufspalten. Dabei handelt sich um einen (gespiegelten) Doppelpol, welcher bei der Sprungantwort des Systems eine gedämpfte Schwingung hervorruft.


- Je nach Zahlenwerten lassen sich mit und verschiedene Formen des Übertragungsverhaltens des Systems darstellen.


Anmerkung: Die Übertragungsfunktion als Suchfunktion in den Laplace-Transformationstabellen ändert sich für die Dämpfungsgrade , und . Damit ändern sich auch die Gleichungen für den Zeitbereich.[5]

| Dämpfung | Normierte Sprungantwort | Kommentar |
|---|---|---|
|
Kriechfall |
Der Systemausgang enthält keine Schwinganteile. Der asymptotische Zeitverlauf der Sprungantwort wird durch zwei -Glieder mit unterschiedlichen Zeitkonstanten bestimmt. Die größere Zeitkonstante dominiert den Verlauf. | |
|
aperiodischer Grenzfall |
 Darstellung 1): T1 = T2 = 2; D = 1 | |
stabiler Schwingfall | Das System enthält 2 konjugiert komplexe Pole: . | T=0,5; D=0,125 |
grenzstabiler Schwingfall | Das System enthält 2 konjugiert komplexe Pole: . | 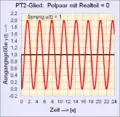 T=0,5; D=0; K=1 |
instabiler Schwingfall | Das System enthält 2 konjugiert komplexe Pole mit positivem Realteil: . | 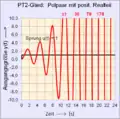 T=0,5; D=-0,125 |
|
instabiler Kriechfall |
Das System enthält 2 reelle positive Pole und lässt sich damit in 2 instabile T1-Glieder aufspalten. |
 T1=10, T2=5, D=-1,06, K=1. |




















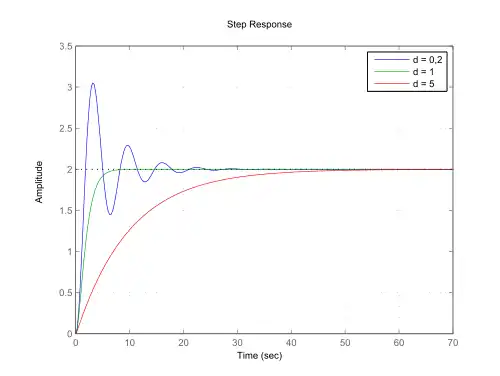
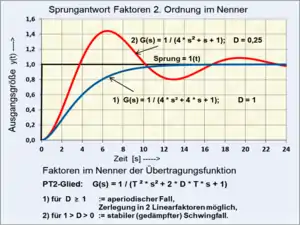
Beispielverläufe der Sprungantworten für unterschiedliche D-Werte: .

Die Übertragungsfunktionen der dargestellten Grafikverläufe lassen sich anhand von Faktorenvergleich mit der Grundform bestimmen. Für alle Verläufe gilt T=1; K=2:
- Für das -Glied mit lautet die Übertragungsfunktion:

- Für das -Glied mit lautet die Übertragungsfunktion:


- Für das -Glied mit lautet die Übertragungsfunktion:

- Für das -Glied mit lautet die Übertragungsfunktion (Verfahren siehe Berechnungsbeispiel):

- mit


Grafische Methoden des Bodediagramms und der Ortskurve zur Bestimmung der Stabilität
Eine Phasenverschiebung von φ < −180° und eine Verstärkung > 1 führt von der Gegenkopplung zur Mitkopplung und damit zur oszillierenden Instabilität, wenn der Regelkreis geschlossen wird.
Aus diesem Verhalten hat der amerikanische Physiker Harry Nyquist Stabilitätskriterien abgeleitet, die sich auf den offenen Regelkreis beziehen und für die Schließbedingung des Regelkreises anzuwenden sind.
Die grafischen Stabilitätsverfahren über das Bodediagramm und der Ortskurve des Frequenzgangs dienen dem Verständnis von Teilgebieten der Systemtheorie, sind aber keine Alternativen zur numerischen Berechnung eines Regelkreises, bei dem tabellarisch das innere Teil-Systemverhalten für jede Berechnungsfolge y(k·Δt) dargestellt und grafisch der zeitliche Signalverlauf verschiedener Ausgangsgrößen für eine beliebige Eingangsgröße gezeigt wird.
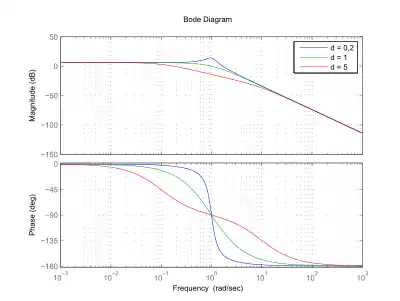
Bodediagramm
Beim PT2-Glied ist

der Frequenzgang. Daher gilt für den Amplituden- und Phasengang im Bodediagramm:


Die folgende Abbildung zeigt den Amplituden- und Phasengang. Typisch für ein PT2-Glied ist der Abfall der Amplitude um 40 dB je Dekade. Auch ist die Phasenverschiebung von 180° kennzeichnend. An der Überhöhung im Amplitudengang kann man erkennen, dass für die Dämpfung gelten muss. Keine Überhöhung bedeutet eine Dämpfung .


Bei der Kennkreisfrequenz (= Eckfrequenz ) hat die Phasenverschiebung einen Wert von -90°. Mit zunehmend steigenden Frequenzen beträgt die Phasenverschiebung maximal |-180|°.

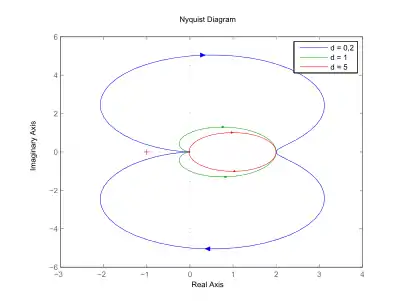
Ortskurve des Frequenzgangs
Die Frequenzganggleichung des offenen Kreises wird nach Realteil und Imaginärteil aufgelöst und in ein Koordinatensystem eingetragen. Die senkrechte Achse zeigt die Daten der Imaginärteile, die waagerechten Achse die Realteile.
Die Ortskurve () des PT2-Gliedes verläuft vom Punkt K auf der positiven reellen Achse in Abhängigkeit von der Dämpfung d durch den vierten und dritten Quadranten für aus Richtung der negativen reellen Achse in den Punkt 0.


Siehe auch
Weblinks
Einzelnachweise
- H. Lutz, W. Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink. 12., ergänzte Auflage. Verlag Europa-Lehrmittel, 2021, ISBN 978-3-8085-5870-6.
- Autor: Jan Lunze / Regelungstechnik 1; Springer Vieweg, Berlin, 8. Auflage 2014, ISBN 978-3-642-53943-5; Hauptkapitel: Übertragungsfunktion, Unterkapitel: Pole und Nullstellen.
- Gerd Schulz: Regelungstechnik 1. 2007, Kapitel „Schwingfähige -Strecken“.
- Identification of a damped PT2 system | Hackaday.io. Abgerufen am 27. Juli 2018 (englisch).
- Lutz / Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink, Kapitel: PT2-Element, Proportional-Element mit Verzögerung II. Ordnung.