Differenzenquotient
Der Differenzenquotient ist ein Begriff aus der Mathematik. Er beschreibt das Verhältnis der Veränderung einer Größe zu der Veränderung einer anderen, wobei die erste Größe von der zweiten abhängt. In der Analysis verwendet man Differenzenquotienten, um die Ableitung einer Funktion zu definieren. In der numerischen Mathematik werden sie zum Lösen von Differentialgleichungen und für die näherungsweise Bestimmung der Ableitung einer Funktion (Numerische Differentiation) benutzt.
Das gilt auch für Übertragungsfunktionen der Systemtheorie, der Steuerungs- und Regelungstechnik für dynamische Systeme mit dem Ausgangs-Eingangsverhältnis der Laplace-transformierten gewöhnlichen Differenzialgleichungen (mit Störfunktion). Sie werden mit der inversen Laplace-Transformation auf gewöhnliche Differenzialgleichungen zurückgeführt und können mit Hilfe des Differenzenquotienten näherungsweise numerisch gelöst werden.

Definition



Ist eine reellwertige Funktion, die im Bereich definiert ist, und ist , so nennt man den Quotienten




Differenzenquotient von im Intervall .[1][2][3]

Schreibt man und , dann ergibt sich die alternative Schreibweise


- .

Setzt man , also , so erhält man die Schreibweise


- .

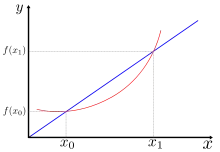
Geometrisch entspricht der Differenzenquotient der Steigung der Sekante des Graphen von durch die Punkte und . Für bzw. wird aus der Sekante eine Tangente an der Stelle .





Differentialquotient
Differenzenquotienten bilden zusammen mit dem Grenzwertbegriff eine Grundlage der Differentialrechnung. Den Grenzwert des Differenzenquotienten für bezeichnet man als Differentialquotienten oder Ableitung der Funktion an der Stelle , sofern dieser Grenzwert existiert.

Die Tabelle zeigt die Ableitungen einiger Funktionen. Dabei stimmt der Differenzenquotient jeweils nur für .

| Funktion | Differenzenquotient | Differentialquotient | |
|---|---|---|---|
| Konstante Funktion | |||
| Lineare Funktion | |||
| Quadratfunktion | |||
| Kubikfunktion | |||
| Allgemeine Potenz | |||
| Exponentialfunktion |



















Definition der Varianten von Differenzenquotienten erster Ableitungsordnung
In der numerischen Mathematik werden zur Behandlung und Lösung von meist gewöhnlichen Differenzialgleichungen mit konstanten Koeffizienten die kontinuierlichen Funktionswerte mit Hilfe einer Differenzengleichung in Abhängigkeit von konstanten Intervallen (, , h) hintereinander berechnet. Die numerische Lösung einer gewöhnlichen Differenzengleichung erfolgt rekursiv über viele Berechnungsfolgen und stellt sich meist als eine tabellarisch geordnete Aufstellung von System-Ausgangsfolgen (Stützstellen, Knoten) in Abhängigkeit von der unabhängigen Variablen , oder bei zeitabhängigen Systemen dar.





Begriffsklärungen
- Gewöhnliche Differenzialgleichung mit konstanten Koeffizienten
- Differenzialgleichungen beschreiben dynamische Vorgänge unserer Umwelt wie Technik, Natur, Wirtschaft. Eine Differentialgleichung enthält außer der gesuchten Funktion z. B. auch eine Ableitung der gesuchten Funktion . Eine Differentialgleichung nennt man gewöhnlich, wenn die gesuchte Funktion nur von einer Veränderlichen (Variable) abhängt.


- Differenzengleichung
- Numerische Berechnungen von gewöhnlichen Differenzialgleichungen erfolgen über Differenzengleichungen. Dabei entsteht anstelle der kontinuierlichen Funktion eine endliche Anzahl von nummerierten Folgegliedern (Wertefolgen). Jede Folge bezieht sich bei einer Differenzengleichung 1. Ordnung rekursiv auf eine zurückliegende Folge.
- Für die numerische Lösung von Differenzialgleichungen existieren zahlreiche Varianten von Differenzengleichungen. Mit steigender Komplexität der Differenzengleichungen wird erreicht, dass für eine gleiche Approximation an den analytischen Verlauf der Ausgangsgröße die Zahl der Folgeglieder erheblich reduziert wird.


- Mathematische Folge
- Bei der Lösung einer Differenzialgleichung mit Differenzengleichungen handelt es sich um eine rekursive Folge von nummerierten Elementen, also um eine Aufzählung von meist Funktionen oder auch von Zahlen. Je nach Art der gewöhnlichen Differenzialgleichung und der zugehörigen Differenzengleichung erhalten die Eingangs- und Ausgangsfolgeglieder der Differenzengleichung für die Nummerierung die Indizierung .


- Arithmetische Folge:
- Der gegebene Folgewert wächst oder sinkt mit jedem Folgeglied um einen festen Betrag. Beispiel: „Sparschwein“.
- Exponentielle Folge:
- Der gegebene Folgewert wächst oder sinkt mit jedem Folgeglied um einen gleichen Prozentsatz bzw. um den gleichen relativen Anteil. Beispiel: Zinseszins.
- Indizierung der Folgen
- Die abhängige Variable entspricht dem nächsten beliebig nummerierten Folgeglied nach einem Rechenschritt . Die abhängige Variable entspricht einem zurückliegenden beliebig nummeriertem Folgeglied vor einem Rechenschritt .



- Differenzenverfahren
- Das Ergebnis der Lösung einer gewöhnlichen Differenzialgleichung ergibt eine kontinuierliche Funktion. Durch Überführung der Differenzialgleichung in eine Differenzengleichung ergibt die Lösung eine diskrete Funktion.
- Mit Hilfe des Differenzenverfahrens lassen sich häufig mit geringem Aufwand Differenzengleichungen aufstellen, die je nach der gewählten Schrittweite eine mehr oder weniger gute diskrete Annäherung an die analytische Lösung bilden.
- Gewöhnliche lineare Differenzialgleichungen, die z. B. ein dynamisches System 1. Ordnung beschreiben:

- können nach dem Differenzenverfahren relativ einfach in eine Differenzengleichung überführt werden. Dies geschieht dadurch, dass die Differenzialquotienten der Differenzialgleichung direkt durch die verschiedenen Formen der Differenzenquotienten ausgetauscht werden. Damit entsteht automatisch die rekursive Differenzengleichung.[4][5]
- Das klassische Verfahren der Lösung von Differentialgleichungen mit Differenzengleichungen ist das eulersche Streckenzugverfahren zur numerischen Lösung eines Anfangswertproblems.[6]
Differenzenquotient
In der Numerik versteht man unter einem Differenzenquotienten die zeitdiskrete Form des Differentialquotienten einer gewöhnlichen Differentialgleichung. Die Differenzenquotienten mit der abhängigen Variablen und der unabhängigen Variablen bzw. bei zeitabhängigen Funktionen der Variable unterscheiden folgende Methoden: [7]


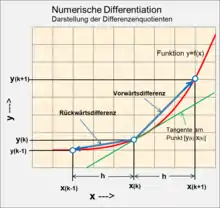
Der Vorwärts-Differenzenquotient für eine Funktion bezieht sich auf die linke Intervallgrenze laut Diagramm nach mit dem Intervall .





Der Rückwärts-Differenzenquotient bezieht sich auf die rechte Intervallgrenze rückwärts nach dem Intervall von nach .


Der zentrale Differenzenquotient bezieht sich auf die rechte und linke Intervallgrenze:


Wird der zentrale Differenzenquotient in eine Differenzialgleichung eingesetzt, handelt es sich nicht um einen arithmetischen Mittelwert zweier Verfahren. Die hohe Genauigkeit der Annäherung an eine analytische Funktion steigt nicht mit fallendem Wert von , sondern mit dem Quadrat des fallenden Wertes von .
Numerische Behandlung einer Differenzialgleichung mit Hilfe des Differenzenquotienten
- Folgende einfache Differenzialgleichung ist gegeben:
- .
- Die Lösung einer gewöhnlichen Differenzialgleichung 1. Ordnung ergibt in der Regel eine allgemeine Lösung in Form einer Funktionenschar mit unendlich vielen Lösungen mit ähnlichem Verhalten.

- Anfangswertproblem der Differenzialgleichung:
- Die Lösung eines Anfangswertproblems ist die Lösung einer Differenzialgleichung unter Berücksichtigung eines vorgegebenen Anfangswertes.
- Der Anfangswert für wird stets vorgegeben.


- Analytische Funktion (falls zu Vergleichszwecken benötigt):
- Für eine geschlossene Lösung einer gegebenen Differenzialgleichung wird die Stammfunktion (Integration)
- gebildet.
- Für die Bestimmung der analytischen Funktion wird die Integrationskonstante berechnet, indem in die Gleichung der Stammfunktion anstelle der Größe der Anfangswert gesetzt wird.
- Bei komplizierteren Differenzialgleichungen kann nicht immer die analytische Funktion durch Integration bestimmt werden. Die Konstante tritt häufig in der gesuchten Lösung nicht immer additiv, sondern auch faktoriell auf.


- Differenzengleichung mit dem Vorwärts-Differenzenquotient:
- Mit Hilfe von Differenzengleichungen kann die Differentialgleichung gelöst werden.
- Wird die Ableitung einer gewöhnlichen Differenzialgleichung durch den Vorwärts-Differenzenquotienten ersetzt,
- .
- entsteht die explizite Differenzengleichung
- .
- Allgemeine Form der Differenzengleichung 1. O. nach dem Vorwärts-Differenzenquotienten (entspricht: „Euler-Vorwärts“):



- Entwicklung der Differenzengleichung:
- Differenzengleichung:
- Der gewünschte Anfangswert wird in der nummerierten Tabelle für bei eingegeben.



siehe auch Anwendung Differenzengleichung (Differenzenverfahren)

siehe auch Artikel Explizites Euler-Verfahren
Gewöhnliche Differenzenquotienten höherer Ableitungs- und Fehlerordnung
Neben der Approximation der Ableitung erster Ordnung, existieren auch Differenzenquotienten zur numerischen Berechnung höherer Ableitungen. Dazu werden in diesem Abschnitt ausschließlich zentrale Differenzenquotienten betrachtet. Analoge Überlegungen existieren auch für den Vorwärts- und der Rückwärtsdifferenzenquotienten.[8] Die Grundlage zur Herleitung solcher Differenzenquotienten ist die Taylor-Reihe. Weiterhin existieren auch Differenzenquotienten mit einer höheren Fehlerordnung.
Für die zweite Ableitung kann zum Beispiel der Zusammenhang

verwendet werden. Die hinter der -Notation stehende Wert kann dabei von abhängig sein. In der nachfolgenden Tabelle sind einige gewöhnliche, zentrale Differenzenquotienten höherer Ableitungsordnung angegeben. Die Tatsache, dass bei ungerader Ableitungsordnung der Funktionswert nicht vorhanden ist, geht auf das Prinzip der zentralen Differenzenquotienten zurück, bei welchem durch Mittelwertbildung die Fehlerordnung erhöht ist. Die Differenzenquotienten mit gerader Ableitungsordnung sind hier mit der minimalen Fehlerordnung angegeben. Diese lässt sich durch hinzunahme weiterer Funktionswerte erhöhen.


| Ableitungsordnung | Formel des Differenzenquotienten |
|---|---|












Rekursionsgleichung
Die Berechnung der höheren gewöhnlichen, zentralen Differenzenquotienten kann mit Hilfe der nachfolgenden Rekursionsgleichung durchgeführt werden. Dabei repräsentiert den Index der Ortskoordinate und den Index der aktuellen Ableitungsordnung. Gestartet wird mit und folglich mit der Rekursionsgleichung für ungerade .





Summendarstellung
Die gewöhnlichen, zentralen Differenzenquotienten können weiterhin mit einer endlichen Summe dargestellt werden. Die Struktur dieser Formel besitzt eine direkte Verbindung zum pascalschen Dreieck beziehungsweise den Binomialkoeffizienten. Die Summendarstellung lässt sich mittels der obigen Rekursionsgleichung herleiten. Der Index repräsentiert die Ortskoordinate, zu welcher der Differenzenquotient ausgewertet wird. Die Summendarstellung von Ableitungen ungerader Ordnung beinhaltet die Methode des zentralen Differenzenquozentien, daher der Vorfaktor .


mit und .


Produktdarstellung
Ausgehend von der obigen Rekursionsgleichung zur Berechnung von gewöhnlichen, zentralen Differenzenquotienten lässt sich eine Matrix-Produkt-Darstellung herleiten. Im ersten Schritt ist dazu eine Produktgleichung für die geradzahligen Ableitungen zu bestimmen, da in diesem Fall die zugehörige Rekursionsgleichung im Gegensatz zu den ungeraden Ableitungen eine geschlossene Kette bildet. Die Elemente der Matrizen sind wie folgt definiert und von der Dimension . Die Matrizen entsprechen genau der Signatur der obigen Rekursionsgleichung für gerade .



Der nachfolgende Vektor beinhaltet die Funktionswerte .



Damit lässt sich die Näherung der -ten Ableitung im Punkt wie folgt darstellen.



Mit Hilfe der Matrizen , mit der Dimension , findet sich ebenfalls eine Produktdarstellung für ungerade Ableitungsordnungen. Die Matrizen entsprechen genau der Signatur der obigen Rekursionsgleichung für ungerade .




Zentrale Differenzenquotienten
Durch geschickte Anwendung der Taylor-Reihe (bzw. Taylor-Polynome) findet sich eine Matrizen-Gleichung zur Berechnung von Differenzenquotienten. Als Ansatz dient dazu die folgende Taylor-Approximation einer -fach differenzierbaren Funktion . Die Verwendung der oberen Grenze der Summe bietet sich aufgrund der größeren Symmetrie an.


Ausgehend von dieser Näherung von sind die Substitutionen durchzuführen. Dies hat, wie in der nachfolgenden Gleichung zu sehen, zur Folge, dass die gesuchten Ableitungen der Funktion am Ort vorhanden sind. Weiterhin ist hier zur Verkürzung die Index-Notation verwendet.



Durch Verschiebung des Index findet sich schlussendlich das nachfolgende lineare Gleichungssystem zur Berechnung der Differenzenquotienten bis zur Ableitungsordnung . Interessant ist dabei die enge Verwandtschaft der System-Matrix zur Vandermonde-Matrix, welche z. B. von der Polynominterpolation bekannt ist.


In der nachfolgenden Tabelle sind einige Lösungen dieses Gleichungssystems angegeben. Zu beachten ist, dass für große die Matrix singulär wird und folglich die Matrix-Inversion am Rechner nicht mehr durchführbar ist. Neben den hier angegebenen Differenzenquotienten, welche in die Klasse der zentralen DZQ's einzuordnen sind, existieren auch andere Varianten.[9][10]















Differenzenquotienten zu beliebigen Stützstellen
Weiterhin besteht die Möglichkeit Differenzenquotienten mit beliebige Stützstellen zu berechnen. Generell lässt sich ein Differenzenquotient mit der nachfolgenden Summe darstellen. Die Konstanten entsprechen dabei den Stützstellen mit Verschiebung um . Der Index entspricht der Ableitungs-Ordnung. Die kleinste Genauigkeit ergibt sich bei . Durch Hinzunahme weiterer Stützstellen kann die Genauigkeit erhöht werden. Die weiter oben angegeben zentralen Differenzenquotienten sind ein Spezialfall der hiesigen Betrachtung.[10]





Die Koeffizienten berechnen sich durch Lösung des folgenden linearen Gleichungssystems, wobei das Kronecker-Delta repräsentiert.



Werden äquidistante Stützstellen gewählt, so stellt sich das lineare Gleichungssystem wie folgt dar.


Literatur
- Jürgen Koch, Martin Stämple: Mathematik für das Ingenieurstudium. Karl Hanser München, 2018, ISBN 978-3-446-45166-7.
- Richardson, C. H. (1954): An Introduction to the Calculus of Finite Differences (Van Nostrand, 1954)
- Mickens, R. E. (1991): Difference Equations: Theory and Applications (Chapman and Hall/CRC)
- PLATO, Robert. Numerische Mathematik kompakt. Vieweg+ Teubner Verlag, 2000.
Einzelnachweise
- Herbert Amann, Joachim Escher: Analysis 1, Dritte Auflage, Birkhäuser, S. 319.
- Jürgen Koch, Martin Stämple: Mathematik für das Ingenieurstudium, Kapitel "Differenzialrechnung, Steigung und Ableitungsfunktion
- Thomas Westerman: Mathematik für Ingenieure, Kapitel "Differenzialrechnung", Differenzenquotient.
- Autor: HS Karlsruhe: Skript „2. Das Differenzenverfahren“, 24 Seiten.
- Autor: Jürgen Dankert; Fachbuchreihe: Numerische Methoden der Mechanik, Einzelfachbuch: „Das Differenzenverfahren“, Springer Vieweg, Berlin, Auszug-Übersicht „Der Grundgedanke des Verfahrens besteht darin, die Differenzialquotienten in Differenzialgleichungen und Randbedingungen durch Differenzenquotienten zu ersetzen.“
- Jürgen Dankert: Numerische Integration von Anfangswertproblemen. Skript, HAW-Hamburg, 39 Seiten.
- Prof. Dr. Christian Clemen, HS-Augsburg; Skript: Mathematik II, Kapitel: Numerische Differentiation, Numerische Integration, Numerische Lösung von gewöhnlichen Differenzialgleichungen, die Methoden von Euler, Heun und Runge-Kutta, verbesserte Euler-Verfahren.
- Hans Rudolf Schwarz & Norbert Köckler: Numerische Mathematik. 6. Auflage. Vieweg+Teubner Verlag, 2006, ISBN 978-3-8351-9064-1, S. 103–104.
- H. B. Keller, V. Pereyra: Symbolic generation of finite difference formulas. In: Mathematics of Computation. Band 32, Nr. 144, 1978, ISSN 0025-5718, S. 955–955, doi:10.1090/s0025-5718-1978-0494848-1.
- Bengt Fornberg: Generation of finite difference formulas on arbitrarily spaced grids. In: Mathematics of Computation. Band 51, Nr. 184, 1988, ISSN 0025-5718, S. 699–699, doi:10.1090/s0025-5718-1988-0935077-0.