Impulsantwort
Die Impulsantwort, auch Gewichtsfunktion oder Stoßantwort genannt, ist das Ausgangssignal eines Systems, dem am Eingang ein Dirac-Impuls zugeführt wird. Sie wird in der Systemtheorie zur Charakterisierung linearer zeitinvarianter Systeme (LTI-Systeme) benutzt. Der Dirac-Impuls wird gern für theoretische Betrachtungen verwendet, da er ein unendlich weites, kontinuierliches Frequenzspektrum besitzt und das invariante Element der Faltung darstellt.
Bei der experimentellen Analyse dagegen werden LTI-Systeme häufig mit der Sprungfunktion angeregt und die Sprungantwort gemessen, die das Übertragungsverhalten eines solchen Systems ebenfalls vollständig beschreibt. Dadurch vermeidet man es, einen Dirac-Impuls in guter Näherung zu erzeugen, wofür das Eingangssignal kurzzeitig einen sehr hohen Wert annehmen muss.
Eigenschaften der Impulsantwort
Im Folgenden bezeichnet die Impulsantwort als Reaktion des Systems auf einen Einheitsimpuls , der bei zeitkontinuierlichen Systemen durch den Dirac-Impuls repräsentiert wird.


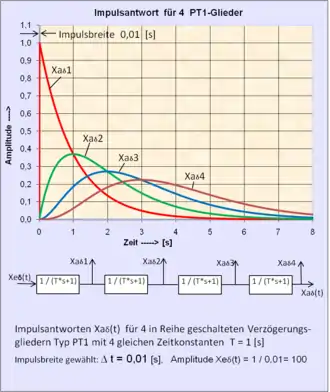
Bei kausalen Systemen erscheint die Wirkung nicht vor der Ursache und deshalb gilt für deren Impulsantwort für . Für das Beispiel eines PT1-Gliedes mit dem Verstärkungsfaktor und der positiven Zeitkonstante (im Bild mit und als rote Kurve dargestellt) lautet die Impulsantwort in Form einer Fallunterscheidung







„Geschlossener“ wirkt die alternative Schreibweise mit der Sprungfunktion als Faktor in der Impulsantwort:


Die Impulsantwort ist bei LTI-Systemen die Ableitung der Sprungantwort nach der Zeit:


Generell ist zu beachten, dass der Dirac-Impuls und die Impulsantwort sowie die Differentiation und Integration im erweiterten Sinne der Analysis der Distributionen zu betrachten sind. Besonders zu behandeln ist eine oft bei vorhandene Unstetigkeit der Sprungantwort. Beispielsweise liefert ein einfacher RC-Hochpass die Sprungantwort . Zum Differenzieren muss die Produktregel verwendet werden:



In diesem Fall wird also der Dirac-Impuls in die Impulsantwort „durchgereicht“.
Bei stabilen linearen Systemen ist die Impulsantwort absolut integrierbar:

Die Impulsantwort als Systemcharakteristik
Besitzt ein (zeitkontinuierliches) LTI-System die Impulsantwort , dann kann man seine Reaktion am Ausgang auf ein beliebiges Eingangssignal aufgrund des geltenden Überlagerungssatzes durch die (kommutative) Faltung von Impulsantwort und Eingangssignal berechnen:



Wenn (aufgrund der Kausalität) sowohl die Impulsantwort als auch das Eingangssignal für negative Zeiten verschwinden, dann braucht nur von bis integriert zu werden.


Unter der Bedingung, dass sich das System zur Zeit im sogenannten 0-Zustand befand (also „energiefrei“ bzw. „entladen“ war), charakterisiert die Impulsantwort ein LTI-System im Zeitbereich vollständig.
Praktisch angewendet wird dieses Prinzip in jüngster Zeit in einigen DirectX- und VST-Plug-ins (siehe Faltungshall), die akustische LTI-Systeme (Räume, Mikrofone, …) virtuell nachbilden.
Impulsantwort und Übertragungsfunktion
Besondere Bedeutung hat die Reaktion eines stabilen Systems auf die harmonische Exponentielle (mit der „imaginären Kreisfrequenz“ ), die durch die Übertragungsfunktion (in ihrer Form als Frequenzgang) beschrieben wird. Diese ist definiert durch




Die Übertragungsfunktion ist also die Fourier-Transformierte der Impulsantwort und charakterisiert ein LTI-System im Frequenzbereich:

Damit lässt sich beispielsweise die Übertragungsfunktion eines PT1-Gliedes aus dessen Impulsantwort berechnen:

Geht man zur komplexen Frequenz über, dann ist die Übertragungsfunktion die Laplace-Transformierte der Impulsantwort:



Für das obige PT1-Glied erhält man damit die (per Definition bekannte) Übertragungsfunktion

Ermittlung der Impulsantwort
Berechnung aus der Differentialgleichung
Ist die Struktur des Systems bekannt, kann daraus seine Differentialgleichung oder sein Differentialgleichungssystem ermittelt werden. Durch den Dirac-Impuls am Systemeingang tritt dieser jedoch als Störfunktion auf der „rechten Seite“ der Differentialgleichung auf. Deshalb versagen die klassischen Lösungsmethoden der linearen Differentialgleichung im Zeitbereich. Aus diesem Grund errechnet man üblicherweise die Sprungantwort und differenziert diese zur Impulsantwort. Wird das System in Zustandsraumdarstellung beschrieben, dann gibt es Lösungsformeln zur Ermittlung der Impulsantwort (siehe Gewichtsmatrix).
Berechnung aus der Übertragungsfunktion
Ist die Übertragungsfunktion oder des Systems durch Messung, Berechnung (beispielsweise durch Transformation der Differentialgleichung in den Frequenzbereich) oder direktes Ablesen aus der Struktur („Symbolische Methode“) schon ermittelt, dann kann daraus durch Fourier- bzw. Laplace-Rücktransformation die Impulsantwort (in manchen Fällen nur auf der Basis von Distributionen) errechnet oder (wie im obigen Beispiel des PT1-Gliedes) direkt aus der Korrespondenztabelle abgelesen werden:

Messung mittels Dirac-Impuls
Theoretisch kann die Impulsantwort eines Systems durch das Zuführen eines Dirac-Impulses bestimmt werden. Allerdings ist es praktisch unmöglich einen solchen Impuls zu erzeugen (unendlicher Augenblickswert in verschwindend geringer Zeit), er kann nur in begrenztem Umfang angenähert werden. Dazu müsste ein möglichst kurzer, starker „Knall“ oder Stromstoß auf das System gegeben und seine Antwort über ein Mikrofon o. ä. gemessen werden. Bei auf diese Weise ermitteltem Frequenzgang kann es zu Verzerrungen kommen, vor allem wegen Nichtlinearitäten der Bauteile (Klirrfaktor), Rauschen, Messungenauigkeiten und begrenzter Belastbarkeit.
Die Impulsantwort liefert bei Lautsprecherboxen eine Aussage über die Impulstreue, bei Räumen über das Zeit- und Frequenzverhalten des Nachhalles.
Ermittlung mittels Sprungantwort
Aus der Sprungantwort eines Systems erhält man durch Differenzieren die Impulsantwort. Aufgrund des plötzlichen Anstiegs der Sprungfunktion gibt es bei deren Messung jedoch ähnliche Probleme wie bei der direkten Messung der Impulsantwort.
Ermittlung mit einem breitbandigen Signal
Die Impulsantwort kann auch mit einem breitbandigen Rauschsignal, wie weißem Rauschen, bestimmt werden. Dafür sendet man das Rauschsignal in das System (z. B. über einen Lautsprecher in einen Raum) und misst gleichzeitig die Antwort des Systems für eine Weile (zeichnet bspw. mit einem Mikrofon eine Zeitlang auf). Anschließend berechnet man die Kreuzkorrelation des gesendeten und des empfangenen Signals, sie ist in diesem Fall direkt die Impulsantwort des Systems.[1]
Ein großer Vorteil dieser Methode ist, dass neben dem Testsignal noch weitere Signale am System anliegen dürfen. Bspw. muss es in einem Raum zur Messung nicht ruhig sein, solange die Störgeräusche (z. B. Gespräche) unkorreliert zum Testsignal sind, denn sie fallen im Anschluss durch die Kreuzkorrelation heraus.
Verallgemeinerungen
Die Gewichtsmatrix
Bei LTI-Systemen mit mehreren Ein- und Ausgangssignalen (sogenannten multivariablen Systemen) mit dem Eingangssignalvektor und dem Ausgangssignalvektor existiert für jedes Eingangs-/Ausgangs-Paar eine „eigene“ Impulsantwort . Diese Impulsantworten fasst man in der Gewichtsmatrix zusammen, so dass das Ein-/Ausgangsverhalten des multivariablen Systems in der üblichen Matrizenschreibweise dargestellt werden kann:






Wird ein zeitkontinuierliches lineares zeitinvariantes System in Zustandsraumdarstellung beschrieben


dann kann die Gewichtsmatrix wie folgt errechnet werden:

Dabei besteht die wesentliche Schwierigkeit „nur noch“ darin, die sogenannte Übergangsmatrix aus dem Matrixexponential nach einer „etablierten Methode“ zu ermitteln.

Die Impulsantwort von zeitvarianten Systemen
Während bei einem zeitinvarianten System die Impulsantwort nicht vom Zeitpunkt des Einheitsimpulses abhängt, ist das bei zeitvarianten Systemen der Fall. Dann definiert man die verallgemeinerte Impulsantwort als Reaktion auf den Einheitsimpuls zum Zeitpunkt . Auch diese Form kann bei linearen zeitvarianten Systemen als Systemcharakteristik dienen. Dabei wird das Ausgangssignal aus dem Eingangssignal durch folgendes Integral ermittelt:




Die Berechnung der Impulsantwort für zeitvariable Systeme ist im Allgemeinen wesentlich schwieriger. Eine aus der Impulsantwort ermittelte Übertragungsfunktion wird in diesem Fall zeitabhängig. Für multivariable Systeme wird analog eine verallgemeinerte Gewichtsmatrix definiert.

Die Impulsantwort von zeitdiskreten Systemen
Bei zeitdiskreten Systemen, z. B. digitalen Filtern, werden die Signale durch Folgen (mit den natürlichen Zahlen als Indexmenge) repräsentiert. Der diskrete Einheitsimpuls wird durch eine Folge dargestellt, bei der nur das 0-te Element gleich 1 und alle weiteren Elemente gleich 0 sind:

Er ist das neutrale Element der diskreten Faltung von Folgen.
Die zeitdiskrete Impulsantwort ist dann die Systemreaktion auf den diskreten Einheitsimpuls in Form einer Folge

Beispielsweise lautet die Impulsantwort für den einfachen gleitenden Mittelwert dritter Ordnung

Im Gegensatz zur Impulsantwort bei zeitkontinuierlichen Systemen gibt es hierbei aufgrund der Endlichkeit des Einheitsimpulses keine Probleme bei der rechnerischen oder experimentellen Ermittlung.
Die zeitdiskrete Impulsantwort charakterisiert ein zeitdiskretes LTI-Systems im Zeitbereich, denn dessen Ausgangsfolge berechnet sich (bei kausalen Systemen und vom 0-Zustand ausgehend) durch diskrete Faltung von Impulsantwort und Eingangsfolge

Dabei spielt es keine Rolle, ob die Komponenten der Folgen einer endlichen (z. B. bei linearen Automaten und Faltungscodierern) oder einer unendlichen Symbolmenge (z. B. bei Abtastsystemen, FIR- und IIR-Filtern) entstammen. Wesentlich ist, dass die Folgen einen linearen Raum bilden. Praktisch werden derartige Folgen durch formale Potenzreihen beschrieben, die man durch z-Transformation, Zeta-Transformation[2] oder eine andere diskrete Operatorenrechnung erhält. Die (zeitdiskret) transformierte Impulsantwort kann als Übertragungsfunktion interpretiert werden. Für das obige Beispiel wird diese (auf Basis der z-Transformation)

Auch bei zeitdiskreten linearen Systemen lässt sich die Impulsantwort für zeitvariante und/oder multivariable Systeme verallgemeinern.
Literatur
- Gerhard Wunsch: Handbuch der Systemtheorie. R. Oldenbourg Verlag, München Wien 1986, ISBN 3-486-20017-8.
- Rolf Unbehauen: Systemtheorie 1. Oldenbourg Verlag, München Wien 2002, ISBN 978-3-486-25999-5.
Weblinks
Einzelnachweise
- B. Girod, R. Rabenstein, A. Stenger: Einführung in die Systemtheorie. Hrsg.: Teubner. 2. Auflage. Teubner, Stuttgart, Leipzig, Wiesbaden 2003, ISBN 978-3-519-16194-3, S. 434.
- Gerhard Wunsch, Helmut Schreiber: Digitale Systeme. 4. Auflage. Springer-Verlag, Berlin Heidelberg 1993, ISBN 978-3-540-56298-6.