Drehmelder
Ein Drehmelder, manchmal als Drehmeldetransformator, Drehfeldgeber oder teilweise mit den englischen Namen Selsyn (ein Kofferwort aus self und synchronizing) oder Synchro bezeichnet, ist eine elektrische Maschine, deren Ausgangsspannung von der angelegten Stützspannung sowie vom Drehwinkel zwischen Rotor und Stator abhängig ist. Die Kombination zweier oder mehrerer, räumlich getrennter und nur elektrisch verbundener Drehmelder dient in Folgesystemen zur elektrischen Winkelübertragung und als induktiv arbeitendes Messinstrument für den Drehwinkel, für ein Drehmoment oder eine Winkeldifferenz.
Ein Drehmeldegeber setzt die Verdrehung des Rotors in eine elektrisch mess- und übertragbare Größe um; ein Drehmeldeempfänger wandelt diese elektrische Größe in eine mechanische Größe zurück. Aus dem Ausgangssignal lässt sich ein Geschwindigkeitssignal ableiten. Die Drehbewegung am Drehmeldeempfänger ist zu der Verdrehung am Drehmeldegeber synchron, so als wären die Achsen beider Drehmelder mechanisch (zum Beispiel mit einer biegsamen Welle) miteinander verbunden.
Drehmelder sehen aus wie kleine zylindrische Motoren mit einem Durchmesser von 1,5 cm bis 15 cm. Die Verbindung mit elektrischen Leitungen ist flexibler als eine mechanische Verbindung. Es lassen sich jedoch nur relativ geringe Drehmomente übertragen, was durch eine äußere Beschaltung mit Verstärkern und Servomotoren verbessert werden kann.


Geschichte

Der erste dokumentierte Einsatz von Drehmeldesystemen mit Drehmeldegeber und -empfänger war 1914/1915 an den Schleusen des Panamakanals zur Übertragung von Torverriegelungen, Ventilstellungen und Wasserständen.[1] Diese ersten Systeme arbeiteten mit Gleichstrom und verwendeten ein spezielles präzises Potentiometer, dessen Widerstandsschicht oder Wicklung aus Widerstandsdraht durchgehend kreisförmig mit mehreren Anzapfungen aufgebaut war. Der Schleifer hatte zwei diametral angebrachte untereinander isolierte Kontakte und konnte anschlagsfrei auf der Widerstandsschicht gedreht werden. Der Schleifer übertrug eine Gleichspannung auf die Widerstandsschicht. An den Anzapfungen konnte je nach Winkelstellung des Schleifers eine Gleichspannung mit einem für diese Winkelstellung spezifischen Wert abgegriffen werden. Auf der Drehmeldeempfängerseite wurde entweder ein Permanentmagnet bewegt oder als Regelkreis ein gleiches Potentiometer durch einen Gleichstrommotor bewegt, bis die Spannungsdifferenzen zwischen Drehmeldegeber und Drehmeldeempfänger Null waren. Diese Gleichstromdrehmelder waren nur für einfache Anwendungen nutzbar.[2]
Leutnant William R. Furlong hatte auf seinen Studienreisen in Europa Regelkreise mit Drehmeldern gesehen und wollte das Prinzip zur Steuerung von Waffensystemen verwenden. Zusammen mit dem Ingenieur Edward Hewlett entwickelten er von 1918 bis 1920 für die Firma General Electric Wechselstrom-Drehmelder, die nach dem Induktionsprinzip arbeiten. Sie waren für den vorgesehenen Zweck einer Waffensteuerung sehr viel genauer als die bis dahin bekannten Gleichstromsysteme. Diese neuen Systeme kamen in den Schlachtschiffen Colorado und Maryland zum Einsatz.[3] Die Gleichstromdrehmelder verloren danach ihre Bedeutung als Winkelgeber.
Die in der Firma General Electric entwickelten Drehmeldesysteme für Fernsteuerzwecke wurden mit dem Markenzeichen Selsyn® benannt. Dieser Name war unglücklich gewählt, da er ebenfalls für das Fernsteuerprinzip mit den motorgesteuerten Potentiometern vergeben wurde. Dieses System wurde zwischenzeitlich DC-Selsyn genannt, da es mit Gleichstrom arbeitet; zur Abgrenzung dazu wurde das induktive Drehmeldersystem dann AC-Selsyn oder induktiver Drehmelder bezeichnet. Die in der Avionik engagierte Firma Kollsman nutzte für ihr Drehmeldesystem den Namen Teletorque, die Pioneer Instrument Division of Bendix Corporation, nannte ihre Geräte Autosyn. Erst ab 1944 setzte sich der durch die Firma Sperry Gyroscope genutzte Name Synchro einheitlich für alle Drehmelder (außer für die Resolver) durch, da diese Bezeichnung in der amerikanischen Marine verwendet wurde, die zu diesem Zeitpunkt ein Hauptnutzer des Systems war.[4][5] Weitere historische Namen waren Telesyn, Synchrotel und Synchrotie.
Die General Electric Company verwendete ihr Drehmeldesystem in vielen ferngesteuerten Anwendungen, zum Beispiel für die Lichtsteuerung im Theater im Rockefeller Center in New York. Das dort 1922 installierte System ermöglichte zusätzlich den Abruf einer Anzahl voreingestellter Sequenzen.[6] Die Firma Western Electric verwendete 1922 dieses System, um für die ersten Tonfilme die Aufnahmen von Kamera und Plattenspieler zu synchronisieren.[7] Für die Filmaufnahmen zu dem in 3D-Technik produzierten Film „I, the Jury“ im Jahre 1953 wurde durch Hannah Lee ein Drehmeldesystem genutzt, das mit einem Drehmeldegeber zwei Drehmeldeempfänger steuerte, um die Kameraschwenks beider Kameras zu synchronisieren.[8]
Im Jahre 1942 wurde ein zweikanaliges Drehmeldesystem durch Robert F. Hays von der Firma Sperry Gyroscope entwickelt und patentiert. Als Schwellwertschalter für den Grobkanal benutzte er zwei antiparallel geschaltete Dioden.[9] In Deutschland wurde in dem Radargerät Würzburg das mit Drehmeldern bestückte „Übertragungsgerät 37“ zur Steuerung von Flugabwehrkanonen genutzt und seit 1940 in Serie für die Geräte Würzburg D und Würzburg-Riese produziert. Die ungewöhnlich präzise Genauigkeit der Winkelmessung beim Würzburg-Riese wurde mit ±0,2 Grad angegeben.
Aufbau von induktiven Drehmeldern
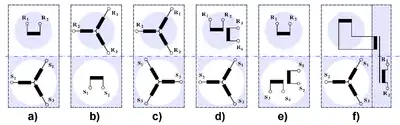
Oben dargestellt: die Rotoren der Drehmelder; unten dargestellt: deren Statoren;
a) einfacher Drehmelder (Innenpolmaschine);
b) einfacher Drehmelder (Außenpolmaschine);
c) Differenzialdrehmelder;
d) + e) Funktionsdrehmelder (Resolver);
f) Schleifkontaktloser Drehmelder
Drehmelder sind von ihrem Aufbau elektrische Wechselstrommaschinen geringer Leistung in hochpräziser Bauweise. Der Stator und der Rotor bestehen aus Paketen aus dünnem Elektroblech, deren einzelne Lagen gegenseitig isoliert gepackt werden. Eine solche Konstruktion bewirkt eine deutliche Verringerung der Wirbelstromverluste. Zur Gewährleistung der erforderlichen Genauigkeit ist die Präzision bei der Schichtung der Blechpakete, bei der Wicklungsausführung und bei den Kugellagern wesentlich höher als bei normalen Wechselstrommaschinen. Aufgrund dieser hohen Anforderungen werden Drehmelder einer jeweiligen Bauart in mehreren Genauigkeitsklassen angeboten. Drehmelder mit drei um 120° versetzten Wicklungen (Dreiphasensystem) werden teilweise mit ihren englischen Namen als Synchro oder Selsyn (englisches Kofferwort aus self und synchronizing) bezeichnet; Drehmelder mit einem um 90° versetzten Zweiphasensystem als Funktionsdrehmelder oder Resolver.
Rotor

I-förmig (mit nur einer Wicklung, meist für Drehmeldegeber);
H-förmig (mit nur einer Wicklung, meist für Drehmeldeempfänger);
Y-förmig (für drei Wicklungen, meist für Differenzialdrehmelder);
Der Rotor ist im einfachsten Fall ein hantelförmiger Kern mit oft nur einer Wicklung, oder mit zwei Wicklungen, die in Reihe geschaltet sind. Die Polkanten sind abgerundet, damit sie nur einen schmalen Luftspalt zum Stator aufweisen. In das Rotorpaket ist eine Achse eingepresst, auf welcher die Schleifringe für die Stromzuführung zum Rotor, Kugellager sowie Zahnräder oder Skalenzeiger aufgesetzt sind. Die Rotorwicklungen sind gleichmäßig in die Nuten des Rotorkernprofils eingelegt. Die Breite der Polkanten kann mehr oder weniger ausgeprägt sein. Oft wird im Drehmeldeempfänger eine stärkere Ausprägung der Polkanten verwendet, als im Drehmeldegeber.[10]
Wird mehr als eine Spule auf dem Rotor angebracht, muss der Kern entsprechend mehr Polkanten erhalten: bei Differenzialdrehmeldern bestehen die Wicklungen auf dem Rotor und dem Stator aus drei um 120° versetzten, zum Stern geschalteten Einphasenwicklungen. Bei Funktionsdrehmeldern kann die Anzahl der Wicklungen auf dem Rotor oder dem Stator abweichen, die entsprechend ihrer Funktion und Anzahl zum Beispiel um 90° verdreht entsprechend ihrer Funktion beschaltet werden. Die Rotoren werden über Schleifringe oder magnetisch getrennte Transformatorwicklungen elektrisch angeschlossen.
Für speziell als Drehmeldegeber konstruierte Drehmelder wird ein I-förmiger Rotorkern bevorzugt, da er eine genauere Positionierung ermöglicht. Für Drehmeldeempfänger wird mehr eine H-Förmige Bauform verwendet. Diese Bauform verteilt die Größe des Drehmoments günstiger und verhindert ein Überschwingen oder Vibrieren um die Nullstelle herum. Eine weitere Möglichkeit solches Vibrieren zu unterdrücken besteht darin, dem Rotor möglichst viel Masse zu geben um das Trägheitsmoment auszunutzen. Hierfür können am Rotor des Drehmeldeempfängers zusätzliche Gewichte montiert werden.
Stator
Der Stator eines Drehmelders ist meist ein zylinderförmiger Körper, der den Rotor umschließt. Er enthält ebenfalls ein Blechpaket als Kern, auf welchen mindestens eine, jedoch meist drei in Dreieckschaltung oder Sternschaltung verknüpfte Spulen gewickelt sind. Eine isolierte Halterung für die Schleifkontakte überträgt die Spannungen auf den Rotor.
Die Wicklungen auf dem Stator können in mehrere Polpaare geteilt sein. Das entspricht einer elektrischen Übersetzung der Drehzahl dieses Drehmelders. Gleichzeitig entstehen dadurch mehrere Nullstellen, die bei Bedarf durch Überlagerung in einem Mehrkanal-Drehmeldesystem (siehe weiter unten) auf eine eindeutige Nullstelle reduziert werden müssen. Für eine hochgenaue Bestimmung einer Winkelposition wären jedoch 18 bis 36, im Einzelfall 648[11] Polpaare nötig. Diese hohe Anzahl von Wicklungen sind auf dem begrenzt zur Verfügung stehenden Raum nicht realisierbar, weshalb diese Mehrkanal-Drehmeldesysteme meist ein Präzisionsgetriebe verwenden. Drehmelder mit einer Vervielfachung von Polpaaren werden deshalb nur dort angewendet, wo entweder der Stator sehr große geometrische Maße erhalten kann oder wo nur eine geringe Zahl von Polpaaren ausreichend ist (zum Beispiel für ausschließliche Drehgeschwindigkeitsübertragung).
Funktionsweise
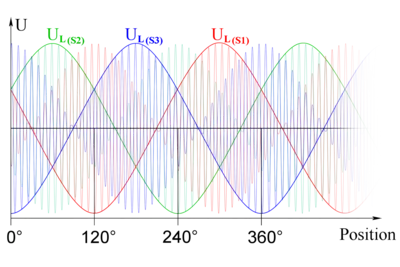
An den Statorspulen wird eine Wechselspannung gemessen mit einem für diese Position (Winkelstellung des Rotors) spezifischen Effektivwert. (Die stärker gezeichnete Hüllkurve ist zu den darin eingeschlossenen Wechselspannungen nicht synchron!)
Die Rotorwicklung bildet mit den Statorwicklungen je einen Transformator, dessen Übersetzungsverhältnis von der Winkelstellung des Rotors zu der Statorwicklung abhängig ist. Eine Spule wird mit einer Wechselspannung gespeist, die hier Stützspannung genannt wird. Der Effektivwert der verwendeten Stützspannung liegt im Bereich von wenigen zehn bis zu 115 Volt, typischerweise mit der vorhandenen Netzfrequenz von 50 Hz oder 400 Hz. Eine höhere Frequenz dieser Stützspannung (bis zu 12 kHz) bewirkt eine sehr viel kleinere Bauform der Drehmelder, so dass Blöcke mit sehr vielen Drehmeldern und ihrem mechanischen Verbund über Zahnräder und Stellräder nicht mehr so eine große klobige Einheit bildeten.
In den anderen, nicht primär gespeisten Spulen des Drehmelders wird eine vom Winkel zu dieser gespeisten Spule abhängige Sekundärspannung induziert. Meist sind diese an dem Stator angebracht. Die Spannungsverläufe an den Statorwicklungen sind nahezu in Phase mit der Erregerspannung der Rotorwicklung und unterscheiden sich in der Amplitude, die vom Sinus des Winkels zwischen Rotor und Statorwicklung abhängt:



Darin ist K das maximale Übertragungsverhältnis zwischen Rotor und Stator; ϑ der Verstimmungswinkel; UL die Spannung am Ausgang der jeweiligen Wicklung (S1 … S3); UR ist die (hier am Rotor eingespeiste) Stützspannung.
Fast jeder Drehmelder kann sowohl als Drehmeldegeber als auch als Drehmeldeempfänger eingesetzt werden. In der Praxis werden jedoch für den Einsatz als Drehmeldegeber spezielle Geräte konstruiert, die zum Beispiel einen höheren Strom auf den Leitungen bereitstellen um mehrere, an verschiedenen Orten installierte Drehmeldeempfänger betreiben zu können. An den Drehmeldeempfänger werden oft höhere Anforderungen an die Genauigkeit gestellt. Bei einer Stützspannung von 110 V bei 50 Hz liegt die maximale Sekundärspannung bei etwa 50 V. Die Speiseleistung eines Drehmeldegebers ist abhängig von der Anzahl der anschließbaren Drehmeldeempfänger und liegt typischerweise zwischen 2 Watt und 20 Watt.[12] Die Genauigkeit der Winkelübertragung kann bis hinab in den Bereich weniger Winkelsekunden reichen.[13]
Bei der Nullstellung eines Drehmeldegebers muss ein Spannungsminimum zwischen den Wicklungen S1 und S2 zu messen sein. Das ist der Fall, wenn das Statorfeld der Wicklung S3 parallel zur Rotorwicklung liegt. Im nachgedrehten Zustand des Drehmeldegebers ist die im Rotor induzierte Fehlerspannung Uf minimal, wenn die Rotorrichtung quer zum resultierenden Statorfeld steht, also eine sehr lose Kopplung zwischen beiden Wicklungen besteht.
Um den Wartungsaufwand zu verringern werden sogenannte bürstenlose Drehmelder hergestellt. Diese können mittels eines Transformators die Stützspannung auf den Rotor übertragen. Eine weitere Möglichkeit besteht darin, dass die Übertragung der Stützspannung durch fest angeschlossene und in geringem Maße bewegliche Kabel erfolgt. Solche Anwendung ist für die Winkelübertragung einer periodischen Schwenkbewegung sinnvoll. Eine Drehung von mehr als 360° muss hier mechanisch verhindert werden.
Ein entscheidender Nachteil von Drehmeldesystemen ist, dass deren Funktion auf Stromfluss basiert und dass sie mit mindestens fünf strombelastbaren Leitungen keine großen Entfernungen überbrücken können. In der Praxis wurden hier meist nur Entfernungen im Bereich 500 m bis 1000 m erreicht.
Der Drehsinn eines Drehmelders wird beim Blick auf die Seite der Anschlussklemmen bestimmt. Liegen die Rotorachsen von Drehmeldegeber und Drehmeldeempfänger auf einer Linie und die Anschlüsse sind gleich beschaltet, ist die Drehrichtung in diesem System gleich: jedoch die unterschiedliche Blickrichtung zu den Anschlussklemmen ergibt eine scheinbare Drehrichtungsänderung.
Ein Drehmelder kann aus mechanischen Gründen an einem rechtsdrehenden System linksdrehend montiert sein. Die Drehrichtung wird in diesem Fall elektrisch geändert. Eine Vertauschung von zwei Anschlüssen der Statorwicklungen an beliebiger Stelle des Systems kehrt die Drehrichtung des Drehmeldeempfängers um.
Drehmeldesysteme
Es gibt zwei wesentliche Anwendungsmöglichkeiten für Drehmelder: den Fernanzeigebetrieb oder Indikatorbetrieb für ein nur geringe Kräfte übertragendes System, das nur eine Anzeigefunktion hat; und den Transformatorbetrieb bei welchem größere Lasten wie tonnenschwere Antennen, Schiffsruder oder komplette Waffensysteme bewegt werden können. Im Indikatorbetrieb wird die Einstellung eines Referenzwinkels unkompliziert auf mechanischem Wege durch Verdrehen des Zeigers auf der Rotorachse vorgenommen. Die Rotoren von Drehmeldegeber und Drehmeldeempfänger zeigen etwa auf den gleichen Winkel zum jeweiligen Stator. In Anwendungen des Transformatorbetriebs wird der Rotor des Drehmeldeempfängers gegenüber dem Rotor des Drehmeldegebers meist um 90° verdreht. Hier wird am Rotor des Drehmeldeempfängers statt eine Stützspannung anzulegen, eine Fehlerspannung Uf abgegriffen, elektronisch weiterverarbeitet und in einem elektromechanischen Regelkreis für die Nachführung auf den Sollwinkel genutzt.
Einkanal-Drehmeldesysteme
Einkanal-Drehmeldesysteme nutzen nur einen einzelnen Drehmeldegeber und können einen oder mehrere, an verschiedenen Orten befindliche Drehmeldeempfänger steuern. Bei der Nutzung mehrerer Drehmeldeempfänger muss der Drehmeldegeber auf den Signalleitungen den Strom für diese Anzahl Empfänger bereitstellen können. Der Drehmeldegeber ist deswegen meist größer aufgebaut als die Empfänger. Die Genauigkeit von Einkanal-Drehmeldesystemen liegt im Bereich von etwa einem Grad.
Fernanzeigebetrieb
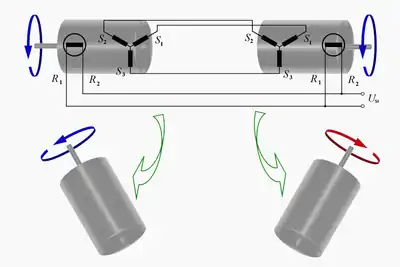
Die Statorwicklungen und die des Rotors sind mit den entsprechenden Wicklungen auf der Gegenseite parallelgeschaltet, wofür fünf Adern nötig sind. Stimmen die Drehwinkel von Geber und Empfänger überein, so werden in den einander entsprechenden Statorwicklungen gleiche Spannungen induziert und es fließt kein Strom.
In dem Fall, in dem die Drehwinkel an beiden Rotoren nicht gleich sind, sind die induzierten Spannungen in den Wicklungen nicht gleich und es fließt ein Ausgleichsstrom abhängig von dem komplexen Widerstand des Stromkreises der Wicklung und der Spannungsdifferenz. Diese Ströme erzeugen in den Wicklungen des Drehmeldeempfängers magnetische Flüsse, die dem magnetischen Fluss der Erregerwicklung des Stators entgegenwirken. Es entsteht dadurch ein synchronisiertes Drehmoment das den Rotor des Drehmeldeempfängers in die Richtung und bis zu dem Zeitpunkt dreht, bis die Winkelstellung des Drehmeldegebers und des Drehmeldeempfängers wieder gleich sind. Somit sind die induzierten Spannungen gleich und es kann kein Ausgleichsstrom mehr fließen, es wird der richtige Winkel angezeigt.
Bei der Drehung der Achse des Drehmeldegebers mit einer konstanten Winkelgeschwindigkeit wird sich die Achse des Drehmeldeempfängers mit derselben Geschwindigkeit drehen. Es entsteht jedoch ein Restfehler, da die mechanische Belastung an dem Rotor des Drehmeldeempfängers der Drehung entgegenwirkt.
Diese einfache Form eines Drehmeldesystems ist nur für geringe Lastmomente geeignet, zum Beispiel für Instrumentenzeiger oder Messgeräteskalen. Die Justierung erfolgt mechanisch durch Verdrehen des Anzeigeelements auf der Rotorachse des Drehmeldeempfängers. Eine elektrische Abstimmung ist nicht notwendig.
Transformatorbetrieb mit Nachführung durch Servomotor
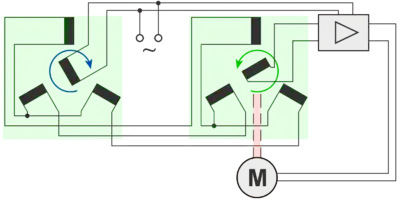
Die begrenzte Stellkraft der Indikatorschaltung kann mit einem Servomotor erhöht werden. In einem solchen System wird der Drehmeldegeber ebenfalls über den Rotor erregt, der Drehmeldeempfänger nur statorseitig mit den Signalen des Drehmeldegebers. Das Magnetfeld im Drehmeldeempfänger ist gleich ausgerichtet wie im Drehmeldegeber. Am Rotor des Drehmeldeempfängers ergibt sich eine Sinusspannung mit der Frequenz der Erregung und einer sinusförmig von der Drehwinkeldifferenz abhängigen Amplitude. Der Arbeitspunkt liegt bei einem der Nulldurchgänge der Amplitude und ist um 90° verdreht. Die verstärkte Fehlerspannung wird einem Servomotor zugeführt. Systeme, die sehr große Antennen mit einem Gewicht im Bereich mehrerer Tonnen bewegen mussten, verwendeten elektromotorische Verstärker: ein starker asynchroner Elektromotor trieb einen Generator an, dessen Erregerwicklung mit der Fehlerspannung gespeist wurde. Als Last wurden an diesem Generator die Antriebsmotoren der Antenne betrieben, die diese kräftig in den Winkel drehten, in welchem die Fehlerspannung einen Minimalwert hat.
In der Praxis sind Drehmeldesysteme im Transformatorbetrieb einfacher aufzubauen, wenn bei einem Fehlerwinkel gleich Null die Ausgangsspannung statt einem Maximum zu folgen, ebenfalls gleich Null ist. Deshalb wird die Nulllage des Drehmeldeempfängers (im Gegensatz zum Indikatorprinzip) derart definiert, dass die Wicklungen des Stators des Drehmeldeempfängers zu den Wicklungen des Stators des Drehmeldeempfängers um 90° versetzt sein müssen.
Transformatorbetrieb ohne Nachführung
Ein solches Drehmeldesystem kann als Transformator oder Umformer genutzt werden. Wird der Rotor des Drehmeldeempfängers nicht dem Drehmeldegeber nachgeführt, so ist der Effektivwert seiner Ausgangsspannung proportional dem Sinus der Winkeldifferenz zwischen beiden Rotoren. Das wird in rundumsuchenden Radargeräten genutzt, um eine Korrekturspannung für eine Windkompensation bei der Festzielunterdrückung zu erhalten. Diese verstimmt minimal den Kohärentoszillator eines pseudokohärenten Radars. Statt der Festziele werden jetzt alle Ziele unterdrückt, die sich mit dieser radialen Komponente der Windgeschwindigkeit bewegen: zum Beispiel die Echosignale starker Wolkenfelder, von Störechos durch Seegang oder gar durch Düppelstörungen.[14]
Anwendung zur Winkelgeschwindigkeitsübertragung
Im Indikatorprinzip ist die Übertragung sehr kleiner Winkeldifferenzen geprägt von nur sehr kleinen Ausgleichsströmen mit der Folge, dass deren Anzeige in diesem Bereich recht ungenau wird. Wird das Drehmeldeprinzip für die Übertragung einer Winkelgeschwindigkeit genutzt (als „elektrische Tachowelle“), so kann durch Vergrößerung der Polpaarzahl die Festigkeit der Übertragung verbessert werden, da im Verhältnis zur Polpaaranzahl die Ausgleichsströme bei kleinen Winkeldifferenzen sich vervielfachen. Allerdings entstehen in diesem Fall entsprechend der Anzahl der Polpaare mehrere Nullstellen (Mehrdeutigkeiten), die mit der einkanaligen Übertragung nicht aufgelöst werden können. Eine maximal übertragbare Winkelgeschwindigkeit wird durch die Frequenz der Stützspannung begrenzt.
Zweikanal-Drehmeldesysteme
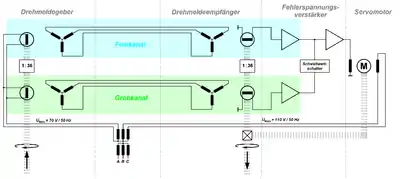
Mit einem Zweikanaldrehmeldesystem (Grobkanal und Feinkanal) kann die Genauigkeit des Folgesystems wesentlich verbessert werden. Es werden zwei Kanäle von Drehmeldesystemen über ein hochpräzises Getriebe mit der Übersetzung 1:25 oder 1:36 gekoppelt. Der Grobkanal spricht bei großen Winkeldifferenzen an, der Feinkanal arbeitet im Bereich kleiner Winkeldifferenzen. Im Normalfall arbeitet das Folgesystem nur mit dem Feinkanal und erzielt damit eine größere Genauigkeit. In diesem Getriebe wird zum Beispiel die Genauigkeit dadurch erhöht, dass ein eventuelles Spiel zwischen den Zahnrädern durch Einsatz von zwei gleichen Zahnrädern verhindert wird. Von denen ist eines fest mit der Welle verbunden, das zweite liegt jedoch lose neben dem festen Zahnrad an. Beide Zahnräder werden mittels einer starken Feder gegeneinander gespreizt, liegen kraftschlüssig links und rechts am gegenüberliegenden Zahn an und verhindern so ein Spiel zwischen den Zahnrädern des Getriebes.
Gute Drehmelder konnten pro Kanal eine Genauigkeit von bis zu 0,25° für den Drehmeldegeber und 0,75° für den Drehmeldeempfänger erreichen. Durch Ungenauigkeiten im Getriebe konnte diese nicht einfach durch das Übersetzungsverhältnis verbessert werden. Jedoch hat zum Beispiel das Zweikanaldrehmeldesystem des Radargerätes P-37 bei guter Abstimmung insgesamt eine Genauigkeit von weniger als 6 Winkelminuten bereitgestellt.
Der Stellmotor erhält entweder die Summe beider Fehlerspannungen der Kanäle, oder es wird der Grobkanal erst bei einer Überschreitung eines Schwellwertes (zum Beispiel wenn der Winkelfehler größer als 3° ist) zugeschaltet. Bei einer nichteindeutigen Stellung wird diese Nullstelle des Feinkanals durch den Grobkanal überdeckt und das System führt über den Grobkanal zur richtigen Nullstelle des Feinkanals. Bei einem geradzahligen Übersetzungsverhältnis (1:36) entsteht eine Scheinnull bei 180° mit einer labilen Nullstelle des Grobkanals (labil: eine Abweichung von Null führt zu einer von Null wegführenden Regelung) und einer stabilen Nullstelle des Feinkanals (stabil: eine Abweichung von Null führt zu einer Regelung in Richtung Null). Insgesamt könnte das System hier nur vom Feinkanal gesteuert auf der falschen Nullstelle arbeiten, wenn die Fehlerspannung über eine längere Zeit zu klein ist, um den Grobkanal einzuschalten. Zur Unterdrückung dieser Nullstelle wird zu der Spannung des Grobkanals eine konstante kleine Wechselspannung gleichphasig summiert. Hiermit kommt es zu einer Verschiebung dieser Nullstelle des Grobkanals, die jetzt nicht mehr mit einer stabilen Scheinnullstelle des Feinkanals übereinstimmt. Das Folgesystem kann sich somit nicht mehr auf diesen falschen Winkel einregeln.
Hochgenaue Systeme nutzen zusätzlich einen Tachogenerator am Drehmeldeempfängerkreis, der die Drehgeschwindigkeit des nachfolgenden Systems misst, in eine der Drehgeschwindigkeit proportionale Spannung umsetzt und mit dieser den Verstärkungsfaktor des Fehlerspannungsverstärkers des Folgesystems regelt. Mit einer solchen Schaltung wird ein mögliches Überschwingen des Systems verhindert und ein gleichmäßiges Nachziehen zum Sollwinkel bewirkt.
Dreikanal-Drehmeldesysteme
Für sehr weitreichende Waffensysteme war die schon hohe Genauigkeit von Zweikanal-Drehmeldesystemen noch nicht ausreichend. Die Winkelgenauigkeit konnte durch Nutzung einer dritten Drehgeschwindigkeit noch erhöht werden. Gängige Verhältnisse von Umdrehungszahlen in den einzelnen Kanälen waren 1:1, 1:36 und 1:180 oder 1:360 sowie 1:1, 1:18 und 1:648.[11]
Differenzialdrehmelder
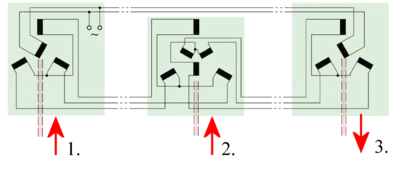
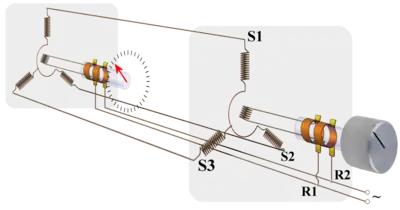
1. Drehmeldegeber mit Eingabe der ersten Winkelstellung;
2. Differenzialdrehmelder mit Eingabe einer zweiten Winkelstellung;
3. Drehmeldeempfänger zeigt Differenz der beiden Winkelstellungen an.
Bei einem Differenzialdrehmelder ist der Stator und der Rotor ein Dreiphasensystem in Sternschaltung. Wird dieser Differenzialdrehmelder zwischen dem Drehmeldegeber und dem Drehmeldeempfänger geschaltet, so ist die Ausgangsspannung am Drehmeldeempfänger proportional der Winkelstellung des Drehmeldegebers und des Differenzialdrehmelders. Mit Hilfe dieser Schaltung kann das Ausgangssignal des Gesamtsystems von mehreren örtlich verschiedenen Punkten beeinflusst werden, zum Beispiel für die Korrektur der Anzeige einer Antennenrichtung auf einem Schiff relativ zur Fahrtrichtung (englisch relative bearing) durch einen Kreiselkompass zu einer Anzeige der Antennenrichtung relativ zur Richtung des örtlichen Meridians (englisch true bearing).
Sogenannte Leistungsdrehmelder zeigen den gleichen Aufbau wie ein Differenzialdrehmelder. Hier wird die Stützspannung als Dreiphasenwechselstrom bereitgestellt. Zur Übertragung muss dann die Stützspannung (statt mit zwei) mit drei Leitungen zum Drehmeldeempfänger oder umgekehrt zum Drehmeldegeber übertragen werden. Oft geschieht dies netzsysnchron, so dass diese Leitungen gleichzeitig die Stromversorgung des Drehmeldesystems darstellen. Diese Drehmeldesysteme können bereits in der Indikatorschaltung höhere Drehmomente übertragen, erreichen dort jedoch nicht die Leistungen von Drehmeldesystemen mit Servomotor. In mehrkanaligen Drehmeldesystemen erreichen sie gegenüber einphasiger Stützspannung geringfügig höhere Genauigkeit.
Funktionsdrehmelder
Funktionsdrehmelder oder Resolver arbeiten im Transformatorbetrieb und wandeln mechanische Größen in elektrische Größen um. Der Stator ist aufgebaut wie bei einem normalen Drehmelder. Der Rotor eines Funktionsdrehmelders enthält zum Beispiel zwei um 90° versetzte Wicklungen, die ein Ausgangssignal proportional dem Sinus und dem Kosinus eines Winkels ausgeben. Mit diesen Spannungen kann ohne weitere mechanische Bauteile die Winkelauslenkung eines Auslenkstrahls der Kathodenstrahlröhre eines Rundsichtgerätes elektronisch gesteuert werden. Spezielle Funktionsdrehmelder wurden in der Vergangenheit in älteren Analogrechnern zur Ausführung komplizierter Rechenoperationen wie trigonometrische Funktionen eingesetzt, zum Beispiel für Koordinatenberechnungen bei Raketenleitsystemen oder die Umrechnung von Polarkoordinaten in kartesische Koordinaten.
Anwendungen
Drehmeldesysteme lassen sich für extreme Temperaturen, radioaktiv „heiße Zonen“ oder den gefluteten Betrieb (zum Beispiel in Transformatorenöl) konstruieren. Sie sind wartungsarm und haben eine hohe Lebensdauer. Diese Vorteile ergeben für Drehmeldesysteme in modernen Anlagen ein weites Anwendungsgebiet. Das Anwendungsprinzip ist dabei nicht nur auf Drehbewegungen reduziert. Der Differentialtransformator ist ein nach dem gleichen induktiven Prinzip arbeitender Sensor, der für lineare Wegstreckenmessung konzipiert ist.
Für den Anzeigebetrieb haben sich digitale Anzeigen durchgesetzt. Dadurch werden die Nachteile der stromgesteuerten Drehmeldeempfänger (hoher Leistungsbedarf auf der Empfangsseite und begrenzte Entfernung zwischen Drehmeldegeber und Drehmeldeempfänger) umgangen. Oft werden vorhandene alte, langlebige und robuste Drehmeldegebersysteme durch moderne computergestützte Anzeigen oder Regelkreise aufgewertet. Die Wandler für die Drehmeldespannungen messen die Spitzenspannung auf den drei Leitungen des Drehmeldegebers in jeder Periode der Stützspannungsfrequenz mittels einer Sample-and-Hold-Schaltung. Bei höheren Frequenzen der Stützspannung oder geringeren Anforderungen an die Genauigkeit kann der eingesetzte Analog-Digital-Umsetzer nach einer Gleichrichtung den Effektivwert dieser Signalspannungen messen. Aus dem Verhältnis der drei Spannungswerte errechnet ein Mikrocontroller den genauen anzuzeigenden Winkel. Dieses Messprinzip kann mehrkanalig mit der daraus erhöhten Winkelgenauigkeit aufgebaut werden.
Zur Erhöhung der Reichweite wurden Modulationsverfahren genutzt. Für eine Übertragung der Drehmeldespannungen über die Richtfunkstrecke RL-30 wurden die Drehmeldespannungen in eine Pulsphasenmodulation umgesetzt und über eine Entfernung von bis zu 15 km übertragen. Am Zielort wurden diese Impulse wieder in Drehmeldespannungen zurückgewandelt, um die Drehung des Auslenkstrahls in den Radarsichtgeräten zu synchronisieren.[15]

Drehmeldesysteme werden beziehungsweise wurden eingesetzt für:
- Positionsanzeigen und Folgesysteme für Antennen und automatische Waffen, überwiegend in der Militärtechnik des Zweiten Weltkrieges und in der Nachkriegszeit[16]
- Positionsanzeigen für Hochspannungsschalter in vollautomatischen Umspannwerken
- Synchronisierung der Antriebe von Dreh- und Hubbrücken[17]
- Synchronisierung der Drehung mehrerer Radargeräte[18]
- Windkompensation bei der Störungsunterdrückung in Radargeräten
- Übertragung von Ruderstellungen in Schiffen, als Anzeige der Ruderlagenanzeiger, zum Beispiel als Verbindung zwischen Steuerrad und Ruderanlage[16]
- Als Maschinentelegraf zwischen dem Maschinenraum eines Schiffes und der Brücke (bevor vollautomatische Schiffssteuerungen nutzbar wurden). Der Telegraf bestand aus zwei unabhängigen Drehmeldesystemen, deren Zeiger auf derselben Achse drehten. Hier erfolgte eine Nachführung des zweiten Zeigers durch den Maschinisten manuell als Quittung für den Befehl (zum Beispiel in der Stellung „Halbe Kraft voraus“)[19]
- Ersatz einer biegsamen Tachowelle für größere Übertragungsentfernungen (sogenannte elektrische Welle)
- Der radio magnetic indicator (RMI) enthält drei Drehmelder, einen zum Antrieb der Kompassrose sowie je einen für die Zeiger der Funknavigationsempfänger
- Steuerung einer Ionenquelle, die in einem elektrostatischen Teilchenbeschleuniger auf hohem Potential liegt
In weniger extremen Umgebungsbedingungen wurden die Drehmeldegeber weitgehend durch optische und magnetische Winkelkodierer oder Inkrementalgeber, die Drehmeldeempfänger durch Schrittmotoren und andere bürstenlose Antriebe oder digitale Anzeigen ersetzt.
Literatur
- M. D. Desai: Control System Components. PHI Learning, New Delhi 2008, ISBN 978-81-203-3605-6, S. 79–102 (eingeschränkte Vorschau [abgerufen am 26. Mai 2013]).
- United States Navy Bureau of Naval Personnel (Hrsg.): Submarine Electrical Installations. Chapter 10: Self-Synchronous Transmitters and Indicators, Chapter 11: Selsyn-Operated Systems. NavPers 16162, 1946 (Chapter 10, Chapter 11 [abgerufen am 26. Mai 2013]).
- Radar Circuit Analysis. In: Department of the Air Force (Hrsg.): Air Force Manual No. 52-8. Chapter 13: Selsyns and Servomechanisms. Washington, D.C. 1951 (lexingtonwx.com [PDF; 10,1 MB; abgerufen am 26. Mai 2013]).
- Jeffrey J. Keljik: Electricity 4: AC/DC Motors, Controls, and Maintenance. 9. Auflage. Delmar, 2008, ISBN 978-1-4354-0031-3, S. 311–316 (eingeschränkte Vorschau in der Google-Buchsuche).
Weblinks
- Rotary Variable Differential Transformer (RVDT). Auf www.allaboutcircuits.com, abgerufen am 3. Dezember 2012.
- Synchro and Resolver Engineering Handbook. (PDF; 2,7 MB) Moog Components Group 2004 (Produktpräsentation eines Herstellers von Drehmeldern, abgerufen am 5. Dezember 2012).
Einzelnachweise
- United States. Panama Canal Commission (Hrsg.): ’Slave’ Motors. In: The Panama Canal Review. Vol. 13, No. 12, 1963, S. 17 (online, abgerufen am 25. Mai 2013).
- F. Postlethwaite: Review of Remote Indicating Systems for Aircraft Instruments. Ministry of Supply, Aeronautical Research Council Reports and Memoranda, London 1945, S. 10 u. 22 (Figure 9) (PDF; 2,6 MB, abgerufen am 16. Januar 2013).
- David A. Mindell: Between Human and Machine. Feedback, Control, and Computing before Cybernetics. Johns Hopkins University Press, 2004, ISBN 0-8018-8057-2, S. 76 f. (eingeschränkte Vorschau).
- L. R. Fink: Position Control. In: General Electric Review. Vol. 47, No. 12, December 1944, S. 40.
- C. F. Savage: Influence of Electricity on Aircraft Instrumentation. In: Electrical Engineering. November 1944, S. 802.
- E. M. Hewlett: The Selsyn System of Position Indication. In: General Electric Review. Vol. 24, No. 3, März 1921, S. 210–218.
- Donald Crafton: The talkies: American Cinema's Transition to Sound, 1926–1931, In History of the American cinema, Vol.4. University of California Press, Berkeley and Los Angeles, California, 1997, ISBN 0-520-22128-1, S. 54 (Buchvorschau in der Google-Buchsuche).
- Ray Zone: 3-D Revolution. The History of Modern Stereoscopic Cinema. University Press of Kentucky, 2012, ISBN 978-0-8131-3611-0, S. 21.
- Patent US2455364: Selsyn-controlled servo system. Angemeldet am 10. Dezember 1942, veröffentlicht am 7. Dezember 1948, Anmelder: Sperry Corporation, Erfinder: Robert F. Hays.
- Richard J. Bliss: Navy Electricity and Electronics Training Series; Module 15 – Principles of Synchros, Servos, and Gyros. Naval Education and Training Professional Development and Technology Center (Hrsg.), 1998 S. 1–10 u. 1–21 (PDF-Datei (Memento vom 28. Oktober 2012 im Internet Archive); 1,6 MB, abgerufen am 5. Dezember 2012).
- Richard J. Bliss: Navy Electricity and Electronics Training Series; Module 15 – Principles of Synchros, Servos, and Gyros. Naval Education and Training Professional Development and Technology Center (Hrsg.), 1998, S. 1–45 (PDF-Datei (Memento vom 28. Oktober 2012 im Internet Archive); 1,6 MB, abgerufen am 5. Dezember 2012).
- G. Schwuchow, H. Ludwig: Funkmesstechniker, Band 1. Militärverlag der DDR, Berlin 1983, S. 32 (Tabelle 1).
- G. Ghidus, A. Simion, L. Livadaru, S. Mihai: Analytic Method for Determination of the Amplitude-Phase Transmission Errors between Selsyns. In: 10th International Conference on Development and Application Systems. Suceava, Romania, 27.–29. Mai 2010, S. 89–93 (PDF; 260 kB).
- J. D. Schirman u. a.: Theoretische Grundlagen der Funkortung. Militärverlag der DDR, Berlin 1977, S. 509.
- Daten der Richtfunkstrecke RL-30 (online).
- United States Navy Bureau of Naval Personnel (Hrsg.): Naval Ordnance and Gunnery, Volume 1 – Naval Ordnance. NavPers 10797-A, Washington, D.C. 1957, S. 214–241 (Chapter 10: Automatic Control Equipment; online, abgerufen am 5. Dezember 2012).
- Dennis Horwitz: Overview of Position Feedback Sensors Available for Bridges and Other HMS Projects. In: HMS Symposium November 2008. Heavy Movable Structures Inc., 2008, S. 1–9 (PDF-Datei (Memento vom 4. März 2016 im Internet Archive); 741 kB, abgerufen am 16. Januar 2012).
- Dienstvorschrift der NVA Nr. A 103/1/225: Objekt WP-02M, Beschreibung und Nutzung. 1980 (verfügbar in Deutsche Bücherei Leipzig).
- United States Navy Bureau of Naval Personnel (Hrsg.): Submarine Electrical Installations. NavPers 16162, 1946, S. 138–159 (Chapter 11: Selsyn-Operated Systems. online (Memento des Originals vom 1. Dezember 2012 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis., abgerufen am 16. Januar 2013).