Kohärentes Radar
Als kohärentes Radar wird ein Impulsradarsystem bezeichnet, welches mit stabilem Phasenbezug einzelner Sendeimpulse zu einer phasenstabilen Referenzschwingung arbeitet. Dieser stabile Phasenbezug ist nötig, um mit Hilfe eines Phasenvergleichs zwischen zwei oder mehreren Impulsperioden störende Echos von Festzielen wie Geländeerhebungen, Vegetation und Bebauung von den Echos von bewegten Zielen (Schiffe, Fahrzeuge, Personen oder Flugzeuge) unterscheiden zu können.
Es gibt drei verschiedene Radargerätekonzepte:
- nicht kohärentes Radar
- voll kohärentes Radar
- pseudokohärentes Radar.
Nicht kohärentes Radar
Selbstschwingende Senderoszillatoren haben eine von Impuls zu Impuls zufällige Phasenlage und sind deshalb nicht kohärent. Jeder Sendeimpuls eines nicht kohärenten Radargerätes beginnt mit einer anderen Phasenlage. Nicht kohärente Radargeräte werden heute noch als Schiffsradar eingesetzt. Die bewegte Wasseroberfläche (sea clutter) erschwert eine Bewegtzielerkennung. Bewegtziele werden bei Schiffsradargeräten im Zielextraktor durch digitale Filter erkannt. Hierzu werden statistische Verfahren und Verfahren der nichtlinearen Dynamik eingesetzt.
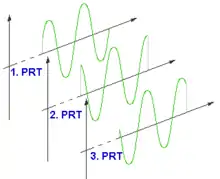
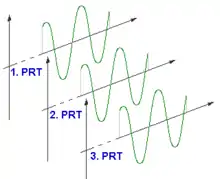
Für Radargeräte, die bewegte Landfahrzeuge oder Luftfahrzeuge erkennen sollen, erfolgt die Bewegtzielerkennung durch Vergleich der Phasenlage von mindestens zwei Echosignalen (Puls-pair processing). Das Echo eines unbewegten Objektes hat immer die gleiche Phasenlage zum aktuellen Sendeimpuls, da keine Entfernungsänderung und gleichzeitig keine Dopplerverschiebung stattfindet. Bewegte Ziele, welche sich mit einer Radialgeschwindigkeit zur Radaranlage bewegen, liefern unterschiedliche Phasenlagen bei aufeinanderfolgenden Messungen. Ein nicht kohärentes Radar kann diese Phasenlage nicht sinnvoll miteinander vergleichen und somit bewegte Ziele nicht von Festzielen unterscheiden.
Voll kohärentes Radar
Waveform-Generatoren kleiner Leistung mit anschließender Hochleistungsverstärkung bewirken eine feste Phasenbeziehung zwischen den Sendeimpulsen, also eine Kohärenz. Die Sendefrequenz wird aus einem stabil und andauernd schwingenden Muttergenerator erzeugt. Die Modulation der Leistungsendstufe des Senders beeinträchtigt nicht die Phasenlage des Sendeimpulses. Wenn angenommen wird, dass auch eine konstante Impulsfolgefrequenz (PRF) aus der Frequenz des Muttergenerators abgeleitet wird, dann startet wirklich jeder Sendeimpuls mit der gleichen Phasenlage. Radargeräte, bei denen die Phasenlage so stabil ist, werden voll kohärent genannt. Für manche Anwendungen ist diese starre Phasenlage eigentlich nicht notwendig, Bedingung ist nur, dass ein Kohärenzoszillator eine phasenstabile Dauerschwingung liefert und jeder Sendeimpuls eine Phasenlage synchron zu der Schwingung des Kohärenzoszillators hat.
Eine Unterscheidung zwischen einem Festziel und einem sich bewegenden Ziel wird bei einem feststehenden Radar oft durch Messung des Phasenunterschiedes zwischen zwei aufeinanderfolgenden Echosignalen durchgeführt. Die Entfernung kann als ein Vielfaches der Wellenlänge angesehen werden. Wenn sich das reflektierende Objekt auch nur geringfügig bewegt, ändert sich die Phasenlage des zweiten Echosignals gegenüber dem vorher empfangenen. Um zu vermeiden, dass durch die Periodizität der Sinusschwingung eine Phasendifferenz von einem Vielfachen von 360° ein stehendes Ziel vortäuscht (sogenannte Blindgeschwindigkeit) werden unterschiedliche Impulsfolgeperioden und oft sogar im Sendeimpuls zwei unterschiedliche Wellenlängen verwendet (Frequenz-Diversity-Radar).
Bei einem Side-Looking-Airborne-Radar haben die Festziele der beobachteten Landschaft alle eine Relativbewegung zu dem Radar. Hier ist die volle Kohärenz notwendig, um aus der für jeden Geländepunkt individuellen Änderungscharakteristik der Dopplerfrequenz eine Verbesserung der Winkelauflösung zu erreichen. Eine Erkennung von bewegten Zielen ist hier nicht so einfach möglich, da sie einen Messfehler in der Winkelbestimmung bewirken (siehe: Synthetic Aperture Radar).
Pseudokohärentes Radar
Pseudokohärente Radargeräte werden manchmal auch „kohärent auf dem Empfangsweg (coherent-on-receive radar)“ genannt. Bei einem pseudo-kohärenten Radar schwingt der Sender wie ein nichtkohärentes Radar mit zufälliger Phasenlage. Er ist deshalb nicht kohärent, weil zwei aufeinanderfolgende Sendeimpulse einen zufälligen Phasenunterschied aufweisen und somit deren Echosignale nicht mehr miteinander verglichen werden können.
Mit jedem Sendeimpuls wird ein freischwingender, aber sehr stabiler Kohärentoszillator synchronisiert, der dann während der Empfangszeit mit der aktuellen Phasenlage des Senders weiterschwingt, bis der nächste Sendeimpuls ihn auf eine neue Phasenlage zwingt. So kann die Phasenlage des Echosignals wenigstens mit dem des synchronisierendenen Sendeimpulses verglichen werden. Dadurch wird ein Phasenunterschied ermittelt, der mit den Phasenunterschieden in der gleichen Entfernung (range cell) aus anderen Impulsperioden verglichen werden kann. Das Verhältnis der Amplituden von bewegten Zielen zu der störender Festziele kann auf diesem Weg in der Größenordnung von etwa +20 dB (Faktor 100) verbessert werden.
Da bei einer Modulation und der Demodulation die Phasenlage erhalten bleibt, braucht der Kohärentoszillator nicht auf der Sendefrequenz zu arbeiten, sondern er kann auf einer geringeren Zwischenfrequenz, die ja bei einem Überlagerungsempfänger ohnehin verwendet wird, schwingen. Dieser Kohärentoszillator wird durch die Phasenlage des Sendesignals zwangssynchronisiert und liefert so die Referenzphase für den Phasendiskriminator. Somit wird für die Dauer der Empfangszeit die Phasenlage des letzten Sendeimpulses erhalten. Die Abstimmung dieses Kohärentoszillators musste manuell erfolgen und oft wegen der Temperaturdrift während des Betriebes mehrmals korrigiert werden.
Eine zweite Möglichkeit der Speicherung der Phasenlage des Senders ist, den Sendeimpuls auf eine Verzögerungsleitung (Verzögerungszeit ist gleich der Impulsdauer des Sendeimpulses) zu schicken und durch Rückkopplung somit eine Dauerschwingung auf der Sendefrequenz zu erzeugen. Auch dieses Signal hat, weil es ja vom Sendeimpuls direkt abstammt, die gleiche Phasenlage wie der Sendeimpuls. Dieses Verfahren wird jedoch heute nicht mehr genutzt. Auch billige Radargeräte, die noch mit einem selbstschwingenden Hochleistungsoszillator (Magnetron) arbeiten, verwenden heute elektronische Schaltungslösungen für Kohärentoszillatoren.
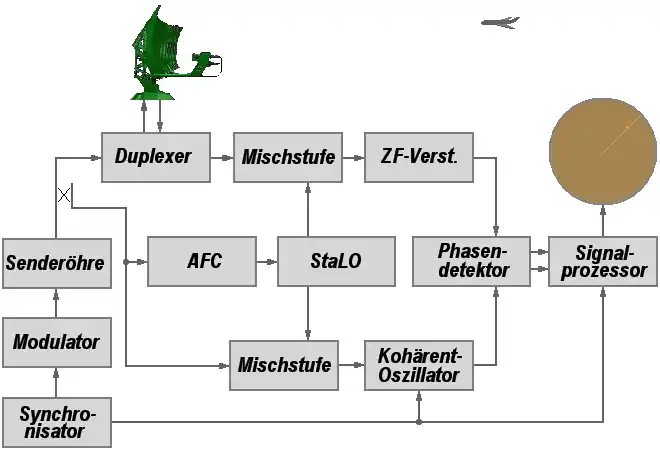
Blockschaltbild eines pseudokohärenten Radars
Arbeitsweise
Der Synchronisator liefert die Zeitreferenz für die Entfernungsmessung. Alle zeitkritisch arbeitenden Baugruppen erhalten Synchronisationsimpulse. Der Modulator stellt für die Sendezeit die Hochspannung für die Senderöhre, meist ein Magnetron, bereit. Der Duplexer schaltet für die Sendezeit die Antenne an den Sender und in der Empfangszeit an den Empfänger.
Zwischen dem Sender und dem Duplexer wird ein kleiner Teil der Sendeenergie ausgekoppelt, um die Automatische Frequenzkontrolle (AFC) zu steuern und um die Phaseninformation für den Kohärentoszillator zu erhalten. Dieser HF-Anteil wird wie im Empfänger auf die Zwischenfrequenz heruntergemischt. Bei der Mischung bleibt die Phaseninformation erhalten.
Der Kohärentoszillator schwingt hochstabil auf der Zwischenfrequenz, wird aber zur Zeit des Sendeimpulses durch diesen zwangssynchronisiert. Während der Empfangszeit schwingt der Kohärentoszillator mit der Phasenlage des letzten Sendeimpulses weiter und stellt für die Phasendetektor eine Referenzfrequenz und die Referenzphase zur Verfügung.
Nachteile
Die Nachteile des pseudokohärenten Radarverfahrens können folgendermaßen zusammengefasst werden:
- Der Synchronisationsvorgang des Kohärentoszillators kann nicht so genau wie bei einem vollkohärenten Radargerät sein. Das reduziert die Erkennbarkeit langsam fliegender Flugzeuge.
- Mit dieser Technologie können kaum Frequenzwechsel durchgeführt werden. Ein Frequenzwechsel mit einem Magnetron erfordert mechanische Änderungen der Resonatoren.
- Dieses System ist unflexibel und kann kaum größere Änderungen der PRF, der Sendeimpulsdauer oder anderer Parameter realisieren. Solche Änderungsmöglichkeiten bleiben dem voll kohärenten Radargerät vorbehalten, welches diese Änderungen schon in Baugruppen mit geringem Leistungsaufkommen vornimmt. Eine Frequenzmodulation des Sendesignals (wie bei dem Pulskompressionsverfahren) ist ebenfalls unmöglich.
- Überreichweiten von Festzielen haben noch den Phasenbezug des vorletzten Sendesignals. Da der Kohärentoszillator aber schon mit der nächsten (zufälligen) Phasenlage arbeitet, können sie nicht mehr als Festziele erkannt werden. Sie sind deshalb bei dem pseudokohärenten Radarverfahren immer als Störung auf dem Sichtgerät sichtbar.
- Ein High PRF Mode zur Verbesserung der Energiebilanz des Radars mit kürzeren Impulsperioden als eine notwendige Laufzeit, ist mit diesem Verfahren nicht möglich.
Literatur
- Renato Croci, „Coherent-on-Receive Systems“, a brief overview, 28. Dezember 2003