Polpaarzahl
Die Polpaarzahl (Formelzeichen: ) ist die Anzahl der Paare von magnetischen Polen innerhalb von rotierenden elektrischen Maschinen.[1] Folglich gilt für die Polzahl: .[2]


Grundlagen


Da magnetische Pole nur paarweise auftreten können, ist die kleinste Polpaarzahl (1 Nordpol + 1 Südpol). Adäquat dazu wird die Polzahl mit bezeichnet. Eine vierpolige Maschine besitzt somit 2 Polpaare.[3] Dies ist folgendermaßen zu verstehen: Im einfachsten Fall, wie bei einer Gleichstrommaschine, bezieht sich die Polpaarzahl auf deren Hauptpolfeld, also das magnetische Feld, welches im Stator durch von Gleichstrom durchflossenen Spulen erzeugt wird. Dieses konstante Magnetfeld hat einen Nord- und einen Südpol. Die Maschine hat somit eine Polpaarzahl von 1.
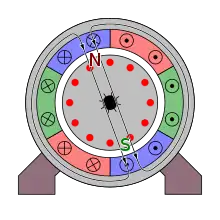
Bei Drehfeldmaschinen wurde für die Definition der Polpaarzahl eine Analogie zur Gleichstrommaschine gesucht. Ein Drehfeld entsteht bei einer Anordnung von 3 Spulen, die gleichmäßig um 120° versetzt im Stator untergebracht sind und von einem entsprechenden Drehstrom durchflossen werden. Alternativ dazu könnte man auch einen Stabmagneten an einer Achse mit entsprechender Drehzahl rotieren lassen. In beiden Fällen wird das gleiche Magnetfeld erzeugt. Ein solches Magnetfeld besitzt ein umlaufendes Polpaar, also einen Nord- und einen Südpol, die sich gegenüberstehen. Eine Drehfeldmaschine, die einen derartig aufgebauten Stator besitzt (bei Außenpolmaschinen der Läufer), hat eine Polpaarzahl von 1. Wenn man nach obigem Beispiel jetzt ein weiteres Spulentripel genau zwischen die anderen drei Spulen anordnet (der Winkel zwischen zwei benachbarten Spulen beträgt nun nur noch 60°) hätte man somit 2 Polpaare.
Der Abstand zwischen zwei Nachbarspulen wird als Polteilung bezeichnet.[4] Gemessen wird dabei von Polmitte zu Polmitte. Je höher die Polpaarzahl ist, umso enger liegen die Spulen beieinander.[5] Neben dem Leistungsfaktor und der Höhe der Klemmenspannung ist bei Asynchronmaschinen die Größe der Polteilung ausschlaggebend für die Anzahl der Nuten pro Pol.[6] Dies hat einen großen Einfluss auf das Verhalten des Luftspaltfeldes. Maschinen erhalten immer entsprechend ihrer Polpaarzahlen eine entsprechende Menge an Spulen.[7]
Beispiel: Ein 4-poliger Drehstromasynchronmotor hat also 2 Polpaare (4 Pole) mit jeweils 3 Spulen, also insgesamt 6 einzelne Spulen.
Zusammenhang Polpaarzahl zum Luftspaltfeld
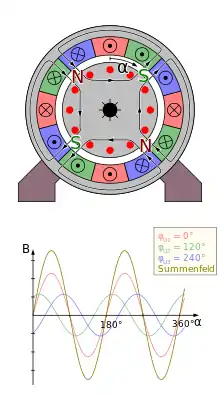
Das Luftspaltfeld erhält pro Polpaar eine volle Kosinusschwingung. Allerdings bewegt sich die Welle während des Durchlaufs einer elektrischen Periode nicht über den gesamten Umfang. Sie bewegt sich nur über den jeweiligen Sektor, welcher von einem Spulentripel eingenommen wird.
Bei einer Polpaarzahl von bewegt sich die Welle des Luftspaltfeldes somit exakt innerhalb einer elektrischen Periode eine komplette Umdrehung über den Umfang der Maschine. Bei einer Polpaarzahl von bewältigt das Luftspaltfeld gerade mal ein Viertel des Umfanges innerhalb einer Periode. Somit werden vier Perioden benötigt, um den vollen Umfang zu durchlaufen.[8]

Zusammenhang Polpaarzahl zur Drehzahl
In direkt am Netz betriebenen Motoren bestimmen die Netzfrequenz und die Polpaarzahl die Drehfelddrehzahl einer Drehfeldmaschine. Synchronmaschinen drehen genau mit der Drehfelddrehzahl, Asynchronmaschinen lastabhängig mit einer leicht abweichenden Drehzahl. Die Drehfelddrehzahl ns lässt sich, wie folgt, ermitteln:[9]


Quelle:[2]
Bezieht man nun die Drehzahl auf eine Minute ergibt sich folgende Formel:


Da die maximale Drehfelddrehzahl bei einer Netzfrequenz von 50 Hz exakt 3000 min−1 beträgt, lässt sich anhand der auf dem Leistungsschild angegebenen Drehzahl ermitteln, wievielpolig die Maschine ist.[10]
Beispiel: Eine 2-polige Synchronmaschine dreht bei 50 Hz demnach mit 3000 min−1, da zwei Pole ein Polpaar bilden.
Erklärung: Ein fiktiver Punkt auf der Welle dreht sich im Laufe einer Halbwelle zum nächsten Pol weiter. Wenn es nur ein Polpaar gibt, also 2 Pole, dreht er sich einmal pro Periode. (Eine Sinusperiode besteht aus zwei Halbwellen). Bei einem Motor mit zwei Polpaaren dreht er sich, da es vier Pole gibt, erst innerhalb von 4 Halbwellen, also 2 Perioden um 360°. Die Drehzahl hat sich also halbiert.[11]
Übersicht der resultierenden Drehzahlen abhängig von der Polpaarzahl (bei den weltweit etablierten Netzfrequenzen):
| Anzahl
Polpaare |
Drehzahl bei Netzfrequenz | ||
|---|---|---|---|
| 50 Hz | 60 Hz | 16⅔ Hz | |
| 1 | 3000/min | 3600/min | 1000/min |
| 2 | 1500/min | 1800/min | 500/min |
| 3 | 1000/min | 1200/min | 333/min |
| 4 | 750/min | 900/min | 250/min |
| 6 | 500/min | 600/min | 167/min |
| 8 | 375/min | 450/min | 125/min |
| 10 | 300/min | 360/min | 100/min |
| 12 | 250/min | 300/min | 83,5/min |
Zusammenhang Polpaarzahl zum Drehmoment
Die mechanische Leistung errechnet sich aus dem Produkt von Drehmoment (in N·m) und Winkelgeschwindigkeit ( in 1/s) der Welle:




Bei netzbetriebenen Motoren gleicher angegebener Nennleistung ist deswegen das Nenndrehmoment proportional zur Polpaarzahl. Die Motoren gleicher Leistung mit der größeren Polpaarzahl sind aber größer als die mit der kleineren Polpaarzahl. Vergleicht man jeweils Motoren mit dem gleichen Grundprinzip und gleicher Größe, so ist das erreichbare Nennmoment nicht grundsätzlich proportional zur Polpaarzahl. Je nach Technologie nimmt das Drehmoment mit steigender Polpaarzahl mehr oder weniger stark, immer aber unterproportional, zu und bei Übersteigen einer höheren Polpaarzahl gar wieder ab.[3]
Literatur
- Ali Farschtschi: Elektromaschinen in Theorie und Praxis. Aufbau, Wirkungsweisen, Anwendungen, Auswahl- und Auslegungskriterien. 1. Auflage. VDE-Verlag, Berlin/ Offenbach 2001, ISBN 3-8007-2563-0.
- Karl Falk: Der Drehstrommotor. Ein Lexikon für die Praxis. 1. Auflage. VDE-Verlag, Berlin/ Offenbach 1997, ISBN 3-8007-2078-7.
Einzelnachweise
- Detlev Roseburg: Lehr- und Übungsbuch: Elektrische Maschinen und Antriebe. Eine Einführung für Ingenieure und Wirtschaftsingenieure. 1. Auflage. Fachbuchverlag Leipzig im Carl Hanser Verlag, Leipzig 1999, ISBN 3-446-21004-0.
- Lothar Billmann: Elektrotechnik Basics. Verlag L. Billmann, Darmstadt 2008, ISBN 978-3-00-025000-2
- Franz Moeller, Paul Vaske; Winfried Kraneburg: Teil 1: Aufbau, Wirkungsweise und Betriebsverhalten. In: Franz Moeller, Paul Vaske (Hrsg.): Leitfaden der Elektrotechnik. 11., überarbeitete Auflage. Band 2 (Elektrische Maschinen und Umformer). B. G. Teubner, Stuttgart 1970.
- Rolf Fischer: Elektrische Maschinen. 12. Auflage. Carl Hanser Verlag, München/ Wien 2003, ISBN 3-446-22693-1.
- Klaus Heuck, Klaus-Dieter Dettmann, Detlef Schulz: Elektrische Energieversorgung. Erzeugung, Übertragung und Verteilung elektrischer Energie für Studium und Praxis. 7., vollständig überarbeitete und erweiterte Auflage. Friedrich Vieweg & Sohn Verlag (Springer), Wiesbaden 2007, ISBN 978-3-8348-0217-0.
- Julius Wolfgang Heubach (Chef-Ingenieur, Kleinzschachwitz bei Dresden): Der Drehstrommotor. Ein Handbuch für Studium und Praxis. 1. Auflage. Verlag von Julius Springer, Berlin 1903.
- Ekbert Hering, Alois Vogt, Klaus Bressler: Handbuch der Elektrischen Anlagen und Maschinen. Springer-Verlag, Berlin/ Heidelberg/ New York 1999, ISBN 3-540-65184-5.
- Dierk Schröder: Elektrische Antriebe. Grundlagen. 3. Auflage. Springer-Verlag (Springer-Lehrbuch), Berlin 2007, ISBN 978-3-540-72764-4.
- Moeller (Eaton): Drehstrom-Asynchronmotor. Elektronische Motorstarter und Drives. Bonn 2009 (online [abgerufen am 12. Juli 2011]).
- Hans-Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung. Elektrische Maschinen und Steuerungstechnik. 4. Auflage. Vogel Buchverlag, Würzburg 1983, ISBN 3-8023-0725-9.
- Rudolf Busch: Elektrotechnik und Elektronik für Maschinenbauer und Verfahrenstechniker. 4., korrigierte und aktualisierte Auflage. B. G. Teubner Verlag, Wiesbaden 2006, ISBN 3-8351-0022-X.