Bode-Diagramm
Unter Bode-Diagramm (engl. Bode plot) versteht man eine Darstellung von zwei Funktionsgraphen: Ein Graph zeigt den Betrag (Amplitudenverstärkung), der andere das Argument (die Phasenverschiebung) einer komplexwertigen Funktion in Abhängigkeit von der Frequenz. Diese Art der Darstellung ist nach Hendrik Wade Bode benannt, welcher diese Diagramme bei seinen Arbeiten in den Bell Laboratories in den 1930er Jahren benutzte.[1][2]
Bode-Diagramme finden ihre Anwendung bei der Darstellung linearer zeitinvarianter Systeme (LZI) im Bereich der Elektronik/Elektrotechnik, Regelungstechnik und Mechatronik sowie in der Impedanzspektroskopie.
Ein Bode-Diagramm beschreibt den Zusammenhang zwischen einer harmonischen Anregung („Sinusschwingung“) an einem Eingang des Systems und dem zugehörigen Ausgangssignal im stationären Zustand, d. h. für . Zur vollständigen Beschreibung eines LZI-Systems mit Eingängen und Ausgängen benötigt man also Diagramme.




Einordnung
Das Bode-Diagramm dient der Darstellung des Übertragungsverhaltens eines dynamischen Systems, auch Frequenzantwort oder Frequenzgang genannt. Andere Diagrammformen zur Beschreibung dynamischer Systeme, wie z. B. das Nyquist-Diagramm (Frequenzgang-Ortskurve) oder das Pol-Nullstellen-Diagramm, dienen dagegen anderen Zwecken, die beiden genannten etwa der Stabilitätsbetrachtung. Das Bode-Diagramm wird, wie auch die anderen Diagramme, aus mathematischen Systembeschreibungen durch Differentialgleichungen hergeleitet und berechnet.
Charakteristische Eigenschaften
- Auf den x-Achsen (Abszisse) wird die Frequenz resp. Kreisfrequenz logarithmisch dargestellt. Dadurch ist auf einen Blick das Verhalten über einen großen Frequenzbereich ersichtlich.
- Auf der y-Achse (Ordinate) des ersten Graphen wird die Verstärkung der Amplitude, also der Betrag des Frequenzgangs in Dezibel oder in logarithmischer Skalierung dargestellt. Dieser Graph heißt Amplitudengang.
- Auf der y-Achse des zweiten Graphen wird die Phasenverschiebung, also das Argument des Frequenzgangs linear aufgetragen. Dieser Graph heißt Phasengang.
Amplituden- und Phasengang werden übereinander aufgetragen, sodass Verstärkung und Phase einer Frequenz vertikal übereinander stehen.
Durch die logarithmische Skalierung des Amplitudengangs haben Bode-Diagramme den Vorteil, dass komplexe Bodediagramme aus (additiver) Überlagerung von einfachen Teildiagrammen erstellt werden können. Dies entspricht einer Reihenschaltung von Übertragungsgliedern. Hierzu wird die komplexe Funktion durch Faktorisieren in Teilfunktionen erster und zweiter Ordnung zerlegt. Durch das logarithmische Auftragen der Verstärkung wird aus der Multiplikation der Teilfunktionen die Addition ihrer Amplitudengänge. Die Phasengänge überlagern sich ohne logarithmische Skalierung additiv.
| Übertragungsfunktion | Bezeichnung | Amplitudengang | Phasengang | Bode-Diagramm |
|---|---|---|---|---|
| P-Glied |  Bodediagramm eines P-Gliedes (K = 2) | |||
| D-Glied | +20 dB/Dekade, 0 dB bei | konstant bei | 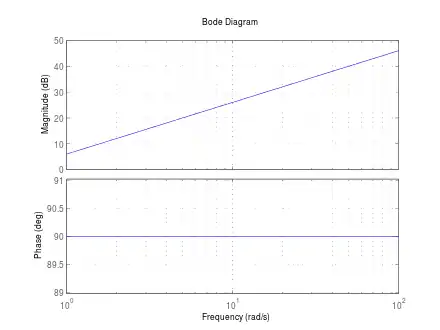 Bodediagramm eines D-Gliedes (K = 2) | |
| +20 dB/Dekade, 0 dB bei | konstant bei | |||
| I-Glied | −20 dB/Dekade, 0 dB bei | konstant bei | 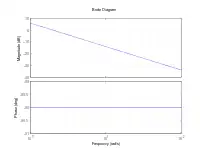 Bodediagramm eines I-Gliedes (K = 2) | |
| −20 dB/Dekade, 0 dB bei | konstant bei | |||
| PD-Glied | Knick bei , dann +20 dB/Dekade | von 0 auf über zwei Dekaden, bei | ||
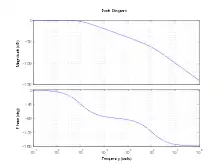
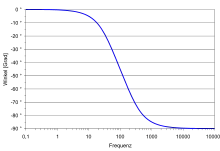
| PT1-Glied | Knick bei , dann −20 dB/Dekade | von 0 auf über zwei Dekaden, bei | 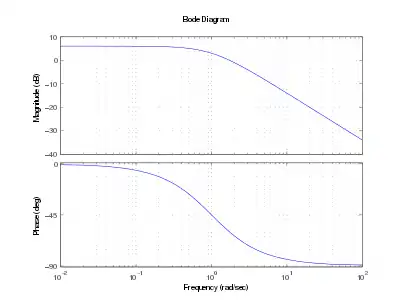 Bodediagramm eines PT1-Gliedes (K = 2, T = 1) | |
| PT2-Glied | Knick bei , dann −40 dB/Dekade | von 0 auf über zwei Dekaden mit einer Stauchung je nach d | 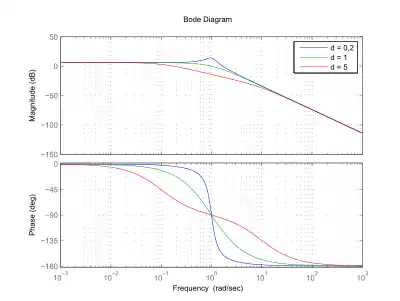 Bodediagramm eines PT2-Gliedes (K = 2, T = 1, d = 0.2; 1; 5) |
















Die Aussage von 0 auf x in 2 Dekaden gilt nur näherungsweise. Die Aussage ist jedoch oft genau genug. Am Beispiel eines PT1-Systems:



Veranschaulichung der Vorteile einer logarithmischen Darstellung
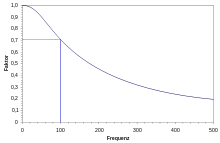
Ein einfacher Tiefpass, zum Beispiel ein RC-Glied, bildet ein sog. PT1-System.

ergibt sich hier aus dem Verhältnis Ausgangsgröße zu Eingangsgröße bei kleiner Frequenz. Wird die Eckfrequenz, bzw. Grenzfrequenz erreicht, ist der Realteil des Nenners gleich dessen Imaginärteil. Dadurch ergibt sich an diesem Punkt eine Phasenverschiebung von und eine Verstärkung von:



Die formelmäßig bestimmten Werte der Eckfrequenz lassen sich aus dem linear eingeteilten Diagramm noch relativ leicht herauslesen. Jedoch spätestens bei komplexeren Systemen ist es sinnvoller, im doppelt logarithmischen Bode-Diagramm zu arbeiten.
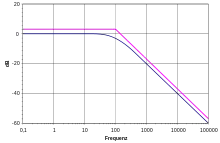
Im Bode-Diagramm kann der Funktionsverlauf auch idealisiert mit Geradenstücken dargestellt werden. Hier im Beispiel ist die idealisierte Kurve um +3 dB angehoben, um besser unterscheidbar zu sein. Am Schnittpunkt der horizontalen mit der abfallenden Gerade liegt die Eckfrequenz. Die reale Funktion ist hier bereits um −3 dB abgefallen. Wenn das System proportionales Verhalten aufweist, kann die Verstärkung, hier , an der Y-Achse ( sehr klein) abgelesen werden.


Anhand der Steigung und des Phasenverlaufes kann man ein System identifizieren. Bei einem PT1-System ist oberhalb die Steigung −1:1. Eine Verdopplung der Frequenz führt also zur Halbierung (−6 dB) der Amplitude, entsprechend die Verzehnfachung der Frequenz verringert die Verstärkung auf ein Zehntel, also −20 dB. Die Phase bei ist −45° und für ist sie −90°.

Sind zwei PT1-Systeme in Reihe geschaltet, so ergibt sich ein PT2-System mit einer Dämpfung . Oberhalb der ersten Eckfrequenz ist die Steigung −1:1, nach der zweiten Eckfrequenz −2:1 (siehe oberstes Bode-Diagramm mit Phase). Liegen die beiden Eckfrequenzen weit genug auseinander, ist die Phase bei der Eckfrequenz −45° und bei der zweiten −90°.

Ein schwingungsfähiges PT2S-System (zum Beispiel RLC-Schwingkreis) lässt sich mit einem komplexen Pol oder als Polynom zweiter Ordnung darstellen. Oberhalb der Eckfrequenz ist die Steigung −2:1. Die Phase beträgt in der Eckfrequenz −90° und strebt im unendlichen gegen −180°. Es tritt eine Resonanzüberhöhung in Abhängigkeit von auf.


Bei Integratoren, I-Systeme genannt, existiert für kleine Frequenzen kein horizontaler Geradenabschnitt. Es geht sofort mit einer Steigung −1:1 los.

Entsprechend bei einem Differenzierer, D-System genannt, ist die Steigung sofort +1:1.

Für kann die Integrations- beziehungsweise Differentiationszeitkonstante abgelesen werden. Diese kann auch als Verstärkung betrachtet werden (Systeme haben grundsätzlich nur P-, I- oder D-Verhalten).

Weblinks
- DIN-A4-Druckvorlage als PDF und SVG
- Bode Diagrams (engl.)
Einzelnachweise
- Mac Van Valkenburg: In memoriam: Hendrik W. Bode (1905–1982). In: IEEE Transactions on Automatic Control. AC-29, Nummer 3, 1984, Seiten 193–194.
- Hendrik W. Bode: Network analysis and feedback amplifier design, Van Nostrand, New York, 1945.