Wetterradar
Als Wetterradar werden alle Radargeräte bezeichnet, die vorwiegend zur Erfassung von Wetterdaten dienen. Wetterradargeräte sind oft untereinander vernetzt und speisen ihre Radarinformation in einen Großrechner ein, der aus diesen aktuellen Beobachtungen eine Großwetterlage berechnet und eine Wettervorhersage durch Simulationen und Vergleichen mit bereits aus der Vergangenheit bekannten Wetterabläufen ermöglicht. Ein bekannter Wetterradartyp ist das Niederschlagsradar, welches manchmal Regenradar genannt wird.



Geschichte
Die Möglichkeit, Radargeräte zur Wetterbeobachtung nutzen zu können, wurde bereits im Zweiten Weltkrieg erkannt. Militärische Zielsuch- und Luftraumaufklärungsradargeräte zeigten die Konturen von Schlechtwettergebieten als Störecho an. Im militärischen Kontext war das nicht erwünscht, da diese Schlechtwettergebiete somit feindliche Flugzeuge verbergen würden. Diese Erscheinungen wurden durch Meteorologen untersucht. Im Jahr 1941 wurde durch John W. Ryde von General Electric das erste Wetterradar gebaut.[1] Er erkannte, dass vorerst die Dämpfung der Radarstrahlen beim Durchqueren eines Regengebietes eine genauere Messung ermöglichten, als durch Rückstreuung. Erst im Jahr 1947 fanden Dr. John Stewart Marshall und sein Student Walter McK. Palmer experimentell einen Zusammenhang zwischen Radarintensität und Regenrate. Die Tropfengrößenverteilung von Marshall und Palmer (1948) ist bis heute die meistbenutzte Funktion in der Meteorologie.
Während des Zweiten Weltkrieges war die Arbeit an einem Wetterradar eher die Ausnahme. Der zivile Einsatz von Radar zur gezielten Wetterbeobachtung erfolgte erst später, ab etwa 1950, vor allem da Radargeräte eine sehr teure Investition darstellten. Anfangs waren die Wetterradargeräte aus Kostengründen auf eine reine Entfernungsbestimmung mit Klassifizierung des gemessenen Reflexionsgrades beschränkt. Erst ab 1980 wurde der Einsatz von Wetterradar zur Normalität.[2]
Ein sogenanntes Hakenecho wurde erstmals am 9. April 1953 von einem Radargerät am Willard Airport bei Champaign (Illinois) aufgezeichnet. Solche Hakenechos in Niederschlagsradaren wurden als Anzeichen dafür erkannt, dass eine Superzelle mit Tornadorisiko vorhanden ist.
Am Meteorologischen Institut der Freien Universität Berlin wurde am 7. Juli 1957 ein X-Band-Radar (9 GHz) in Betrieb genommen. Noch am selben Tag konnte vor einer herannahenden Unwetterfront gewarnt werden.
Die Nutzung des Dopplereffekts zur Messung von Windgeschwindigkeiten innerhalb des Niederschlagsgebietes wurde 1961 durch Roger Lhermitte und David Atlas beschrieben.[3][4] Diese Geschwindigkeitsmessungen hatten anfänglich die Bestimmung der Regentropfengröße durch Messung ihrer Fallgeschwindigkeit als Ziel. Da die Fallgeschwindigkeit jedoch nicht von der lokalen Windgeschwindigkeit unterschieden werden konnte, wurde dieser Weg zur Bestimmung der Tropfengröße verworfen und nur noch eine Windgeschwindigkeit gemessen. Zur Vermessung und Vorhersage einer Bewegungsrichtung von Tornados und Hurrikanen boten die Doppler-Wetterradare gute Messmöglichkeiten.
Das erste Wetterradar für atmosphärische Untersuchungen auf der Basis von Dauerstrichradar wurde 1969 gebaut.[5] Seit den 1970er-Jahren[6] werden Dauerstrichradare als Wetterradar sowie für gleichzeitige Entfernungs- und Geschwindigkeitsmessungen genutzt. Im Jahre 1976 wurde Dauerstrichradar erstmals für Messungen der Dopplerfrequenz von Windgeschwindigkeiten eingesetzt.[7][8]
Ab Mitte der 1970er-Jahre machte es der technologische Fortschritt in der Radar- und Computertechnik möglich, die Dynamik der Wolken und die innere Struktur der Superzellen eines Gewitters näher zu untersuchen. Diese Messungen eines einzelnen Doppler-Radars geben zwar nur ein eindimensionales Bild des Geschwindigkeitsfeldes, die Lage der Auf- oder Abwindzonen in Gewittern lassen sich damit jedoch bestimmen. Eine Beobachtung mit zwei Doppler-Radargeräten gleichzeitig aus unterschiedlichen Richtungen kann darüber hinaus ein dreidimensionales Bild des Geschwindigkeitsfeldes erzeugen.[9] Das erste Radar des Radarverbundes vom Deutschen Wetterdienst wurde 1987 in München installiert. Erst im Jahr 1990 wurde ein Composit-Bild des DWD-Radarverbunds aus vier Radarstandorten generiert. Eine Vernetzung der Radargeräte und ihre Ankopplung an große Rechenzentren für eine digitale Erarbeitung einer Wettervorhersage wurde bis zur Jahrtausendwende großflächig durchgeführt.
Ab der Jahrtausendwende begann ebenfalls die praktische Erprobung von polarimetrischen Radarsystemen. Eine direkte Messung der Tropfengröße ist erst mit diesem polarimetrischen Radar möglich, wie es von Dušan Zrnić in den 1990er-Jahren beschrieben wurde.[10] Dieses Radar kann das Verhältnis von Höhe und Breite der Wassertropfen, Schneeflocken und Graupel- oder Hagelkörner (zusammengefasst als Hydrometeore) messen. Aus diesem Verhältnis kann entweder die Größe der Regentropfen bestimmt oder Regentropfen von Hagelkörnern unterschieden werden.[11]
Typen
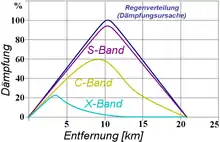
Das Grundprinzip der Entfernungsmessung ist bei allen Wetterradargeräten gleich. Unterschiede bestehen in der Variation von Parametern, die für ein bestimmtes erwartetes Ergebnis optimiert werden können. Hauptsächlicher Unterschied besteht im genutzten Frequenzbereich. Die Wahl des Frequenzbereiches bestimmt die Dämpfung der elektromagnetischen Wellen durch die Atmosphäre, mehr noch durch eine Wolke oder den Niederschlag. Die Arbeitsfrequenz bestimmt die mögliche Eindringtiefe der Radarstrahlen in dieses Niederschlagsgebiet und welche Objekte aus diesem Gebiet zu einer Reflexion beitragen. Das heißt, ob auf dem Wetterradar von diesem Gebiet nur die Außenkonturen zu sehen oder die innere Struktur erkennbar ist, ist abhängig von dieser Arbeitsfrequenz. Nebenstehendes Bild zeigt in der obersten (blaue) Kurve als Ursache einer Dämpfung die geometrische Ausdehnung eines Gewitters mit 20 km im Durchmesser mit einer zum Zentrum hin zunehmenden Niederschlagsmenge bis 100 mm/hr. Die darunterliegende Kurve (in Lila) zeigt die im Pegel angeglichene Amplitude der Radarechos von einem Radargerät im S-Band. Die nächsten zwei Kurven zeigen das Gleiche von einem Radargerät im C-Band (Ocker) und einem im X-Band (Hellblau). Es ist ersichtlich, dass Wetterradargeräte im X-Band nur für den Nahbereich konzipiert werden können. Die Sendeenergie Radar im S-Band wird hingegen kaum bedämpft – das ist ebenfalls ein Zeichen dafür, dass dieses Radar dieses Niederschlagsgebiet nur sehr schwach anzeigen wird, da nicht genug Energie reflektiert wird. Für die gewünschte Reichweite müssen die notwendigen energetischen Bedingungen geschaffen werden. Wetterradargeräte haben deshalb einen weiten Bereich der genutzten Impulsleistung des Senders von nur wenigen Kilowatt bis hin zu mehreren Megawatt.
| Wetterradar | Frequenzband | Radarabdeckung | Ursache für Reflektivität | Reichweite | Bemerkung |
|---|---|---|---|---|---|
| Niederschlagsradar (große Reichweite) |
S-Band (um 3 GHz) | Vollständige Raumabtastung, meist Rundumsicht mit stufenweiser Erhöhung des Höhenwinkels |
Hydrometeore wie Regentropfen, Hagel, Eis, Schnee | > 800 km | geringe Frequenz ermöglicht große Eindringtiefe; wird meist in subtropischen Klimaregionen mit geringer Standortdichte und sehr heftigen Niederschlägen eingesetzt |
| Niederschlagsradar (kurze oder mittlere Reichweite) |
C-Band (um 5,6 GHz) | bis 200 km | höhere Frequenz heißt geringere Reichweite bei höherer Genauigkeit geeignet für gemäßigtes Klima und größerer Standortdichte | ||
| Windprofiler (MST-Radar) | HF- bis UHF (30 bis 3000 MHz) |
senkrecht nach oben mit leichter Variation der Richtung | Grenzschichten zwischen Luftmassen unterschiedlicher Dichte | 2 bis 20 km | sogenanntes Clear-Air-Doppler-Radar |
| Windprofiler (microwave sounder) |
oberhalb K-Band (> 40 GHz) | Kodensationströpfchen wie Nebel und Wolken Grenzschichten der Luft an akustischen Longitudinalwellen |
bis 15 km | oft mit akustischem System SODAR gekoppelt | |
| Wolkenradar Cloud-Profiling-Radar (CPR) | W-Band (96 GHz) | von Satellitenposition aus senkrecht nach unten (Nadir) | Luftfeuchtigkeit (auch Nebel, Wolken) | etwa 500 km | misst die Wolkenhöhe als Abstand zum Orbit nutzt den High-PRF-Mode, stellt Ergebnisse „along track“ dar, also als Funktion des Weges |
| Wolkenradar Millimeter-wave cloud radar (MMCR) |
K- und W-Band (33 und 96 GHz) |
vom Boden senkrecht nach oben | Wolken | etwa 20 km | in beiden Frequenzbändern polarimetrisches Radar, misst die Wolkenhöhe und Wolkenstruktur direkt über dem Radar, stellt die Ergebnisse als Funktion der Zeit dar |
| Airborne Radar | X-Band (etwa 10 GHz) | Sektorsuche voraus in Flugrichtung | Niederschlag und Wolken, Flugzeuge und Hindernisse | etwa 200 km | Ist ein Luftraumaufklärungsradar in einem Flugzeug, Wetterdaten werden im Skin-Paint-Mode dargestellt, Flugzeuge auch als Symbole. Ein Antikollisionssystem zeigt seine Daten meist auf dem gleichen Display an. |
| Microburst Radar | X-Band (etwa 10 GHz) | Rundumsuche | Grenzschichten zwischen Luftmassen unterschiedlicher Dichte, Staub, Insekten | etwa 2 km | ein modifiziertes Airborne Radar stationär auf dem Flugplatz, zeigt trockene Fallböen (Downbursts) an, bevor sie dem Piloten gefährlich werden können. |
Niederschlagsradargeräte
Niederschlagsradargeräte sind Impulsradare in relativ niedrigen Frequenzbereichen. Sie registrieren Hydrometeore in der Größenordnung ab etwa 100 µm bis hin zu mehreren Millimetern. In der Praxis werden Wetterradargeräte als Niederschlagsradar im S-Band eingesetzt, um in tropischen Regionen mit sehr intensiven Wettererscheinungen über große Entfernungen aufzuklären. Für die gleiche Aufgabe kann in einem gemäßigten Klima ein Radargerät im C-Band genutzt werden, welches durch die höhere Frequenz und eine effektivere Antennengröße sehr viel genauer sein kann. Ein Einsatz von Mehrfrequenzradargeräten zur Unterscheidung von Wolke und Niederschlag hat im Wetterradar eine besondere Bedeutung: Der Unterschied zwischen beiden Arbeitsfrequenzen muss mindestens mehrere Frequenzbänder betragen. Zum Beispiel das MMCR nutzt das K- und das W-Band mit einem Frequenzunterschied von 1,5 Oktaven.
Für die Erfüllung unterschiedlicher Aufgaben sind die Wetterradargeräte als Sensoren mit unterschiedlichen Eigenschaften ausgestattet. Die maximale Reichweite (und damit die Sendeleistung) sowie der genutzte Frequenzbereich wird gemäß den Erwartungen an die Ergebnisse angepasst. Durch die Divergenz der elektromagnetischen Wellen über die Entfernung und die damit verbundene räumliche Ausdehnung des ausgesendeten Radarimpulses wird ein Wetterradar umso ungenauer, je entfernter sich das zu untersuchende Wetterphänomen befindet. Die Winkelauflösung eines Radars ist entfernungsabhängig. Das Impulsvolumen im Strahl des weit entfernten Radars ist wesentlich größer (im Bild rot eingegrenzt), als das Impulsvolumen des nahegelegenen Radars (im Bild blau eingegrenzt). Somit hat das weiter entfernte Radar ein sehr viel schlechteres Auflösungsvermögen und ist damit ungenauer. Vielen kleineren Wetterradargeräten ist deswegen gegenüber einem Großraumwetterradar der Vorzug zu geben. Der Deutsche Wetterdienst kann mit 17 Radarstandorten mit einer Reichweite von je 150 km die Gesamtfläche Deutschlands abdecken.
Wolkenradar
Wolkenradar (meist Cloud-Profiling-Radar genannt) misst die Reflexionen an kleinsten Wassertröpfchen und deren Kondensationskernen. Diese Radargeräte nutzen deshalb Frequenzen oberhalb von 30 GHz bis zu 96 GHz, um kleinste schwebende Tröpfchen mit einem Durchmesser von 10 bis 100 µm erkennen zu können.[12] Satellitengestützte Wetterradargeräte, welche direkt die Verteilung der Luftfeuchtigkeit in der Atmosphäre messen sollen, verwenden ebenfalls Frequenzen oberhalb von 94 GHz.[12] Das Niederschlagsradar (PR) an Bord des Satelliten TRMM (Tropical Rainfall Measuring Mission) nutzt eine Arbeitsfrequenz im Bereich von 14 GHz.
Wind-Profiler

Windprofiler oder Wind-Profiling-Radar bezeichnet ein Wetterradar, welches verwendet wird, um Höhenprofile der vertikalen und horizontalen Winde in der Troposphäre zu messen. Um Windgeschwindigkeiten messen zu können, muss ein reflektierendes Objekt genutzt werden, welches in der Luft schwebt und sich mit der Windgeschwindigkeit bewegt. Das Prinzip kann sich auf zwei verschiedene reflektierende Objektgruppen gründen. Eine Gruppe nutzt Schwebeteilchen in der Luft und verwendet deswegen möglichst hohe Frequenzen. Eine andere Gruppe nutzt den unterschiedlichen Brechungsindex von Luftschichten für ein Echosignal.
Microwave Sounder (MWS) strahlen direkt nach oben ab und messen die Höhe verschiedener Luftschichten direkt über dem Radar. Oft geschieht dies gleichzeitig mit einer sonarähnlichen Technik, weshalb der Name eher nach einem Akustikgerät klingt. Mit ihrer sehr hohen Arbeitsfrequenz können sie dichte Wolken nicht durchdringen, die Struktur innerhalb der Wolke bleibt ihnen verborgen.
Reine Wind Profiler nutzen eine Phased-Array-Antenne, um den nach oben gerichteten Strahl geringfügig elektronisch schwenken zu können. In drei verschiedenen Richtungen wird die Dopplerfrequenz gemessen und unter der Annahme, dass Windrichtung und Windgeschwindigkeit in diesem kleinen abgetasteten Höhenbereich konstant ist, werden aus den drei verschiedenen gemessenen Radialgeschwindigkeiten die horizontale Windgeschwindigkeit und die Windrichtung über Grund berechnet. Mit dem sogenannten radio acoustic sound system kann zusätzlich die Temperatur in höheren Schichten indirekt gemessen werden. Lautsprecher strahlen einen Ton in sehr großer Lautstärke nach oben ab. Im Takt dieser Longitudinalwellen wird die Luft verdichtet, es bilden sich Wanderwellen aus, die sich mit Schallgeschwindigkeit fortbewegen. Die Schallgeschwindigkeit variiert jedoch geringfügig mit der Lufttemperatur. Deshalb verändert sich die Wellenlänge und die Abstände zwischen den Druckmaxima sind nicht konstant. Das Radar misst diese Abstände mithilfe von Interferenzen, die gemäß der Bragg-Bedingung entstehen. Das Radarecho aus einer bestimmten Entfernung ist genau dann maximal, wenn die Abstände der sich mit Schallgeschwindigkeit fortpflanzenden akustischen Welle gleich der halben Wellenlänge der Radiowellen des UHF-Radars sind. Durch leichte Variation der Sendefrequenzen können die akustischen Wellenlängen sehr exakt gemessen werden. Aus diesen gemessenen Wellenlängen einer akustischen Schwingung mit einer gegebenen Frequenz kann die genaue Schallgeschwindigkeit berechnet und daraus die Lufttemperatur abgeleitet werden.
Clear-Air-Doppler-Radar Es empfängt die durch unterschiedliche Dichte verursachten Unregelmäßigkeiten des Brechungsindexes der Luft zerstreute Energie (sogenannte „Clear-Air-Echos“, im Luftraumaufklärungsradar als „Engel“ bekannt) und misst das Dopplerspektrum der zum Radar zurückgestreuten Echosignale.[2] Diese Geräte nutzen meist den Frequenzbereich von 30 bis 3000 MHz (VHF- und UHF-Band), weil erstens der Energiegehalt einer atmosphärischen Turbulenz mit abnehmender Wirbelgröße rapide fällt und weil zweitens das Radar hier vorwiegend Echosignale von Turbulenzen mit einer Größe empfängt, die innerhalb des Bragg-Bereiches, das heißt in der Größe der halben Wellenlänge des Radars liegt. Bis in eine Höhe von wenigen tausend Metern wird meist der UHF-Bereich genutzt. Das gewährleistet relativ kleine Antennen, die schnell auf- und abgebaut werden können. Diese UHF-Radargeräte werden oft als boundary layer radars, auf Deutsch etwa Grenzschichten-Radar bezeichnet. Da die Mindestgrößen der Turbulenzen mit zunehmender Höhe exponentiell zunehmen, werden für sogenannte MST-Radare (für Höhen in der Mesosphäre, Stratosphäre und Troposphäre) oder ST-Radare (für Höhen in der Stratosphäre und Troposphäre) Frequenzen kleiner als 50 MHz verwendet. Dieser Frequenzbereich verlangt wesentlich größere Antennendimensionen, hat aber den Vorteil, dass diese Frequenzen selbst starke Niederschlagsgebiete und Wolken problemlos durchdringen.
Wetterradar im Flugzeug
Ein in ein Flugzeug eingebautes Wetterradar wird als airborne weather radar bezeichnet. Die ungenaue deutsche Übersetzung Bordwetterradar konnte sich im Sprachgebrauch nicht durchsetzen. Anhand der Nutzung ihrer Daten können zwei unterschiedliche Gerätegruppen unterschieden werden. Hauptsächliche Anwendung ist die Frühwarnung der Piloten vor gefährlichen Wettererscheinungen und die Anzeige der Radardaten direkt im Cockpit. Ein weiterer Anwendungsfall ist der Einsatz eines Doppler-Radars in einem Spezialflugzeug für die Wetterforschung.
.jpg.webp)
Bugradar

_on_Boeing_747-400_(cropped).jpg.webp)
Generell sind größere Flugzeuge mit einem Wetterradar ausgestattet, das meist im Bug hinter einem Radom (als radar nose bezeichnet) eingebaut ist. Frühere Geräte konnten auch in der Profilnase eines Flügels eingebaut sein. Für das Radargerät gelten besondere Anforderungen an Größe und Gewicht. Das Wetterradar im Flugzeug arbeitet meist im X-Band (etwa 10 GHz). Somit kann die Antenne trotz guter Richtwirkung sehr klein gehalten werden. Es ortet damit nicht nur Regentropfen, sondern ebenfalls Aerosole und Wolken. Die Anzeige der Wetterinformation erfolgt auf einem Multifunktionsradardisplay (MFRD oder MFD).[13] Das Wetterradar ist über das Sichtgerät immer mit dem in Flugzeugen ohnehin zulassungsmäßig geforderten Sekundärradar gekoppelt (zum Beispiel Flugfunktransponder und Kollisionswarnsystem) und kann dessen Zusatzinformationen ebenfalls darstellen.[14] Modernste Avionik stellt das momentane sowie das zukünftige Wetter auf einem zentralen Cockpit Situation Display dar.[15]
Das Wetter im Cockpit wird meist im sogenannten Skin-Paint-Mode angezeigt. Das heißt, wie bei einem analogen Radar wird die Oberfläche des Bildschirms mit einer Farbe für die Stärke des Echosignals hinterlegt. Oft wird das Wetterradar deswegen auch als Skin-Paint-Radar bezeichnet. Flugzeuge im Bereich des Wetterradars werden als synthetisches Zielzeichen (Target) dargestellt, das entweder im Plotextraktor des Primärradars oder nach einer Abfrage oder einer ADS-B-Message aus dem Sekundärradar generiert wird. Die Radarsignalverarbeitung kann aus in Datenbanken gespeicherten Modellen sogar eine Klassifizierung der Primärradardaten vornehmen. In einigen militärischen Bugradargeräten kann somit aus dem charakteristischen Dopplerspektrum eines Propellerflugzeuges und einer dazu passenden typischen Größe der effektiven Reflexionsfläche auf Tankflugzeuge erkannt werden.
Da die relative Antennengröße gemessen an der verwendeten Wellenlänge keine sehr starke Bündelung zulässt, wird in diesem Fall meist mit Hilfe des Verfahrens „Doppler Beam Sharpening“ ein höher aufgelöstes Bild erzeugt. Dessen Arbeitsprinzip ist, dass jeder von dem aktuellen Kurs abweichende Winkel eine nach der Sinusfunktion verringerte Doppler-Frequenz haben muss. Deshalb können Echosignale gemäß der empfangenen Doppler-Frequenz innerhalb des aktuellen Beams genauer positioniert werden. Im Bereich des effektiven Einsatzes des Doppler Beam Sharpening kann die Seitenwinkelauflösung von einer Antenne mit einem realen Öffnungswinkel von etwa 4° auf Werte um 0,5° verbessert werden.
Auch militärische Flugzeuge (Jagdflugzeuge) verwenden ein Bugradar. Dieses Radar ist ein Multifunktionsradar, das vorrangig zur Zielsuche und Zielbekämpfung eingesetzt wird. Gleichzeitig wird das Wetter mit dargestellt. Möglich ist solche Aufgabenverteilung durch eine digitale Erzeugung mehrerer Antennendiagramme gleichzeitig in der Empfangszeit. Dazu wird jedes einzelne Antennenelement der Phased-Array-Antenne mit einem eigenen Empfänger und einem eigenen Analog-Digital-Umsetzer ausgestattet. Eine phasenkorrekte Addition der einzelnen Empfangssignale erfolgt softwaremäßig in einem Beamforming Processor. Im Sendemoment muss ein sehr breites Antennendiagramm abgestrahlt werden, welches alle gewünschten sehr schmalen Empfangsdiagramme abdeckt. In der Radargrundgleichung muss in diesem Fall zur Reichweitenberechnung ein getrennter Antennengewinn für den Sendemoment und für den Empfangsmoment verwendet werden.
Seiten- oder Heckradar
Die Nutzung von Wetterradargeräten als Seiten- oder Heckradar in einem Spezialflugzeug bietet gegenüber stationären Radargeräten Vorteile. Während stationäre Radargeräte passiv auf das Herannahen eines Unwetters warten müssen, kann das Flugzeug direkt das Geschehen anfliegen und Nahaufnahmen aus geringer Distanz liefern. Diese Nahaufnahmen haben eine sehr gute Auflösung, da das Impulsvolumen des Radarstrahls noch nicht weit aufgefächert ist. Der Einfluss irgendwelcher Störsignale ist wegen der Größe der Echosignale aus direkter Nähe geringer. Nachteil ist dagegen, dass die durch das Flugzeug zu transportierenden Antennen keine großen geometrischen Dimensionen aufweisen können. Für das Verhältnis Antennengröße zur Wellenlänge muss deswegen ein Kompromiss gefunden werden. Ein Beispiel für ein solches spezielles Wetterradar ist das ELDORA/ASTRAIA-Doppler-Wetter-Radar[16]
Wetterkanal im Aufklärungsradar
In großen Luftraumaufklärungsradargeräten wird oft ein Wetterkanal integriert. Wetterdaten werden benötigt, um die Entdeckungswahrscheinlichkeit von Flugkörpern innerhalb der Filter des Plotextraktors zu verbessern. Wenn das Luftraumaufklärungsradar als Flugsicherungsradar eingesetzt wird, dann werden diese Wetterdaten gleichzeitig für die Flugberatung und für die Leitung eines Landeanflugs benötigt. Es liegt also nahe, diese Wetterdaten auf einem eigenen Bildschirm (oder Bildschirmfenster) dem Fluglotsen darzustellen. Für Meteorologen ist dieser Wetterkanal dagegen wenig aussagekräftig, da er nur ein eingeschränktes Auflösungsvermögen hat. Meist werden in diesem Wetterkanal nur vier verschiedene Reflektivitäten als Farbcodes angezeigt. Dieses Wetterbild ist somit nur für eine kurzfristige Wetterwarnung verwendbar.
Klassifizierung
Eine Klassifizierung von Wetterradargeräten kann nach mehreren Gesichtspunkten vorgenommen werden. Aus der historischen Entwicklung und den daraus folgend unterschiedlich entwickelten technischen Messmöglichkeiten werden Wetterradargeräte eingeteilt in konventionelle, Doppler- und polarimetrische Radargeräte.
- Ein konventionelles Wetterradar kann als Wetterradarsystem ohne Messmöglichkeit für die Doppler-Frequenz definiert werden. Es nutzt einen freischwingenden selbsterregten Sender (meist ein Magnetron) und ist deshalb nicht kohärent. Dieses Wetterradar misst neben der Laufzeit einzig die Leistung des Echosignals. Damit kann nur die räumliche Verteilung der Niederschlagsintensität bestimmt werden. Konventionelle Wetterradargeräte sind eine historische Entwicklungsstufe und werden praktisch nicht mehr genutzt.
- Das meist verwendete Wetterradarsystem ist das Doppler-Wetterradar. Diese Radargeräte sind mindestens kohärent auf dem Empfangsweg und können deshalb zusätzlich die Dopplerfrequenz messen. Hierbei wird zusätzlich zur räumlichen Verteilung der Niederschlagsintensität die Radialgeschwindigkeit des Niederschlags auf Grundlage des Doppler-Effekts bestimmt. Kleinräumige Änderungen in der Radialgeschwindigkeit können bei entsprechender Wetterlage Indikatoren von Luftzirkulationen sein (zum Beispiel Tornados).
- Das Polarimetrische Wetterradar ist ein Doppler-Wetterradar, welches in der Lage ist, Impulse mit verschiedenen Polarisationsrichtungen zu senden und zu empfangen. Durch die Anwendung mehrerer Polarisationsrichtungen elektromagnetischer Wellen und die Auswertung der daraus entstehenden Unterschiede im empfangenen Echosignal werden zusätzliche Informationen über die Form und die Art des Niederschlags gewonnen. Polarimetrische Radargeräte werden außerhalb von Forschungsinstituten nur als Niederschlagsradar genutzt. Neuere Geräte bieten auch den STAR-Mode (von engl.: Simultaneous Transmit And Receive), welcher hier für das gleichzeitige Senden und Empfangen in beiden Polarisationsrichtungen steht.[17]
Arbeitsweise
Das technische Prinzip eines Wetterradars ist dem eines Primärradars und Impulsradars für die militärische Luftraumaufklärung sehr ähnlich. Wie bei jedem Primärradar werden durch einen leistungsstarken Sender hochfrequente Schwingungen erzeugt. Diese Energie wird durch eine Antenne als elektromagnetische Welle gebündelt und gerichtet abgestrahlt. Trifft diese Welle auf ein Hindernis, so wird sie teilweise oder vollständig reflektiert. Dieses Echosignal wird vom Wetterradar wieder empfangen und ausgewertet. Der entscheidende Unterschied besteht darin, dass bei einem Radargerät für die Luftraumaufklärung ein Ziel nur detektiert wird (Ziel vorhanden: ja/nein), gemessen werden nur die Koordinaten des Zielstandortes. Bei einem Wetterradar hingegen ist die Intensität des Echosignals von Bedeutung. Diese wird über die Messung der Leistung des Echosignals bestimmt und gibt Aufschluss darüber, in welcher Intensität und in welcher Konsistenz reflektierende Objekte im Beobachtungsraum existieren. Im Vergleich zum Luftraumaufklärungsradar werden Störungen durch nicht erwünschte Echosignale (Clutter) entgegengesetzt klassifiziert. Echosignale eines Flugzeugs sind im Wetterradar eine Störung und das im Luftraumaufklärungsradar genannte „Wetterclutter“ ist hier das Ziel der Messung.
Anders als bei Radargeräten der Luftraumaufklärung (zum Beispiel der Flugsicherung oder der Luftverteidigung) werden keine kompakten Punktziele geortet, sondern Volumenziele, wodurch sich in der Folge energetische Unterschiede ergeben. Bei einem Volumenziel wird das gesamte Impulsvolumen durch reflektierende Objekte ausgefüllt. Je weiter weg sich das Volumenziel befindet, desto größer wird das Impulsvolumen und desto mehr reflektierende Objekte können sich darin befinden. Das Impulsvolumen zum Beispiel für ein Wetterradar mit einem Öffnungswinkel der Antenne von kleiner als 1° und einer Impulsdauer von 0,4 µs hat in einer Entfernung von 50 km die Maße von 800 m × 800 m × 80 m. Wolken mit Niederschlagswahrscheinlichkeit haben meist sehr viel größere Dimensionen. Die Verteilung der Wassertröpfchen (entweder als Regen oder als dichte Wolke) in diesem Volumen wird als gleichmäßig angenommen und füllt somit dieses Volumen in einer bestimmten Dichte völlig aus. Ein einzelnes Punktziel verliert sich hingegen mit seiner entfernungsunabhängigen effektiven Reflexionsfläche in diesem Impulsvolumen.
Dadurch ergeben sich für beide Radaranwendungen unterschiedliche Reichweitenbedingungen. Wenn ein Radar im S-Band als Flugsicherungsradar beispielsweise eine Reichweite von 100 km für Punktziele hat, dann erzielt das gleiche Radar als Niederschlagsradar eingesetzt eine Reichweite von 230 km für Volumenziele.[18]
Da ein Wetterradar keine zeitkritischen Messungen machen muss, kann die Antenne eine scharfbündelnde Parabolantenne sein, die sich zum Beispiel als Niederschlagsradar kontinuierlich um 360° dreht und nach jeder Umdrehung einen geringfügig anderen Höhenwinkel abtastet. Durch diese spiralförmige Raumabtastung ist das Wetterradar ein 3D–Radar, welches standardmäßig nur alle 5 bis 15 Minuten neue Daten bereitstellt. Dabei wird innerhalb von 15 Minuten ein kompletter Volumenscan durchgeführt, indem bis zu 18 verschiedene Höhenwinkel von +0,5° bis +37° abgesucht werden. In den Höhenwinkeln von +0,5° bis +4,5° wird in einem sogenannten intensity mode meist eine Reichweite von 230 km abgesucht. In den übrigen Höhenwinkeln wird der sogenannte Doppler mode mit einer Reichweite von 120 km verwendet. Da den Werten aus dem untersten Bereich (+0,5° bis +1,8°, je nach Deckungswinkel des Geländes) für die Niederschlagsmessung eine besondere Bedeutung zukommt, wird der vollständige Volumenscan alle 5 Minuten unterbrochen, um diesen untersten Höhenwinkelbereich in zeitlich kürzerer Folge abzusuchen.[19]
Für sehr hohe Anforderungen an eine Genauigkeit der Entfernungsbestimmung werden statt des Impulsradars mit einer Laufzeitmessung als Maß für die Entfernung Dauerstrichradar-Geräte genutzt. Das Dauerstrichradar-Verfahren bietet mit der Messung einer Frequenzdifferenz als Maß für die Berechnung einer Laufzeit und in der Folge für die Entfernungsbestimmung wesentlich genauere Messmöglichkeiten, die Geräte haben dann aber nur eine geringe Reichweite. Das kann gezielt ausgenutzt werden, indem diese Dauerstrichradargeräte speziell als Microwave Sounder zur Messung der Wolkenhöhe oder der Grenzschichten zwischen verschiedenen Luftmassen unterschiedlicher Dichte eingesetzt werden. Dauerstrichradar-Geräte sind gegenüber Impulsradargeräten sehr preiswert und können deshalb in großer Zahl produziert und eingesetzt werden.
Blockschaltbild
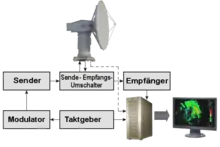
Ein allgemeines Blockschaltbild eines Wetterradargerätes besteht aus einer meist sehr großen Antenne, die dreh- und schwenkbar auf einem Drehtisch montiert ist, den Elektronik-Racks in einem technischen Betriebsraum und einem oder mehreren Systemrechnern mit Monitoren.
Antenne
Die Antenne ist meist eine symmetrische Parabolantenne mit einer Größe, die so im Verhältnis zur genutzten Wellenlänge steht, dass eine Richtwirkung von ungefähr 1° entsteht. Im S-Band (3 GHz) hat diese Antenne einen Durchmesser von etwa 8,5 m, im C-Band (5,6 GHz) von etwa 4,2 m. Bei einem in ein Flugzeug eingebautes Wetterradar kann der Durchmesser maximal einen Meter betragen. Das Radar arbeitet passend zu diesem Durchmesser im X-Band (etwa 10 GHz). Die aktuelle mechanische Positionierung wird über Encoder direkt an den Systemrechner gemeldet.
Ein Sende-Empfangsumschalter (oder Duplexer genannt) schaltet den Sender im Sendemoment an die Antenne. Er muss gleichzeitig den empfindlichen Empfänger vor der hohen Leistung des Senders schützen. Im Empfangsmoment müssen die Echosignale zum Empfänger geleitet und dürfen dabei nur wenig bedämpft werden. Er ist meist auf der Grundlage von Gasentladungsröhren aufgebaut.
Windprofiler benutzten meist eine Phased-Array-Antenne, um den Radarstrahl elektronisch schwenken zu können. Airborne-Radare nutzen ebenfalls eine Phased-Array-Antenne, allerdings nicht mehr für die elektronische Strahlschwenkung, sondern um ein festes Antennendiagramm zu erzeugen, welches dann mechanisch geschwenkt wird. Diese mechanische Schwenkung wird in Abhängigkeit von der Fluglage durch Servomotoren in die waagerechte Richtung stabilisiert.
Sender und Modulator
Für sehr geringere Reichweiten kann ein Sender auf Halbleiterbasis (meist MMIC- Technologie) genutzt werden. Da meist sehr hohe Impulsleistungen benötigt werden, werden oft Klystrone als Leistungsendstufe und Wanderfeldröhren als Treiberstufen verwendet. Der Modulator sorgt dafür, dass die Senderöhren nur zum Zeitpunkt des Sendens mit der notwendigen Hochspannung versorgt werden.
Zeitsteuerung durch Taktgenerator
Für eine eindeutige Entfernungsmessung und eine eindeutige Dopplerfrequenzmessung (bekannt unter dem Stichwort „Doppler-Dilemma“) müssen in der Zeitsteuerung des Radars Kompromisse eingegangen werden. Für eine eindeutige Entfernungsbestimmung sollte die Impulsfolgefrequenz so niedrig wie möglich sein, damit zwischen den Sendeimpulsen ausreichend Zeit verbleibt für den Empfang von Echosignalen aus großer Entfernung mit relativ großer Laufzeit. Geschwindigkeit wird über den Umweg einer Phasenänderung von Impulsperiode zu Impulsperiode gemessen. Damit wird aber der Bereich einer eindeutigen Geschwindigkeitsmessung mittels des Doppler-Effektes eingeschränkt. Da eine Dopplerfrequenz auf der Grundlage von Phasenänderungen des Echosignals von einer Impulsperiode zur nächsten gemessen wird, kann nur eine Dopplerfrequenz eindeutig gemessen werden, die kleiner als die Impulsfolgefrequenz ist. Für diese Messung sollte die Impulsfolgefrequenz so hoch wie möglich sein. Wetterradargeräte im C-Band benötigen für eine eindeutige Entfernungsmessung innerhalb von 150 km eine Impulsfolgefrequenz unter 1 kHz. Um die maximal zu erwartenden Spitzengeschwindigkeiten eines Orkans von bis zu 300 km/h messen zu können, ist jedoch eine Impulsfolgefrequenz von mindestens 3 kHz nötig.[20] Deshalb benutzen Wetterradargeräte eine veränderliche Impulsfolgefrequenz, mit der zum Beispiel in einer Richtung dicht über dem Erdboden mit der Erwartung einer großen Reichweite eine geringere Impulsfolgefrequenz genutzt wird. Wenn die Antenne in einen großen Höhenwinkel zeigt und deshalb nur eine geringere Reichweite benötigt wird, benutzt das Wetterradar eine höhere Impulsfolgefrequenz. Gleichzeitig wird in diesem Fall ebenfalls eine geringere Impulsleistung benötigt, so dass der Sender trotz dieser Unterschiede in der Zeitsteuerung und einer veränderlichen Impulsleistung ständig eine gleich große Dauerstrichleistung abgeben kann.
Die Anwendung einer intrapulse modulation sowie des Pulskompressionsverfahrens als Mittel zur Verbesserung des Auflösungsvermögen in der Entfernung ist technisch möglich, allerdings wird sie im Wetterradar nicht gern benutzt. Die unvermeidlichen zeitlichen Nebenzipfel des Ausgangssignals würden die Messergebnisse für die benachbarten Rangecells verfälschen. Ein Herausrechnen ist zwar möglich, wenn die Größe der Nebenzipfel bekannt ist, bedeutet aber einen riesigen Rechenaufwand, da diese Korrektur für jede Rangecell einzeln durchgeführt werden muss. Wetterradargeräte verwenden deshalb einen meist extrem kurzen Sendeimpuls, zum Beispiel im Bereich von 0,4 – 4,5 µs.[21] Falls doch eine intrapulse modulation durchgeführt wird, so ist das oft eine Phasencodierung nach einem Barker-Code, da die dabei entstehenden Nebenzipfel eine bekannte Größe haben.
Empfänger

Der Empfänger setzt die hochfrequenten Echosignale in eine leichter zu verarbeitende Zwischenfrequenz um. Störungen und Rauschen werden so weit wie möglich ausgefiltert. Diese Zwischenfrequenz wird digitalisiert. Eine Demodulation erfolgt nur noch digital im Systemrechner.
Für die in einem Wetterradar eingesetzten Empfänger gelten besondere Anforderungen an Linearität und Dynamikbereich. Die kleinsten zu verarbeitenden Echosignale haben eine Stärke von etwa −120 dBm (diese Leistung liegt im Pico-Watt-Bereich). Die Empfänger dürfen durch starke Festzielstörungen (Echosignale von Bodenhindernissen wie Fahrzeuge, Gebäude, Bäume und Geländeerhebungen) nicht in die Sättigung kommen. Diese Festzielstörungen können 96 dB (4.000.000.000-fach) größer sein als diese schwachen Echosignale. Um diese Leistungsunterschiede überhaupt verarbeiten zu können, müssen im Empfänger besondere Maßnahmen ergriffen werden.
Die Empfänger benötigen eine sehr hohe Dynamik, eine extreme Empfindlichkeit und vor allem eine sehr gute Genauigkeit. Änderungen in der Linearität der Verstärkung müssen dem Radarsignalprozessor bekannt sein, um bei der notwendigen Dynamikkompression im Empfänger die Information über die genaue Amplitude des Originals wiederherstellen zu können. Deshalb sind einfache STC-Schaltungen und logarithmische ZF-Verstärker mit Demodulation, wie sie bei Luftraumaufklärungsradargeräten verwendet werden, generell nicht geeignet.
Um diesen Dynamikbereich des Empfängers zu erweitern, werden mehrere Empfängerschaltungen parallel betrieben. Eine Empfängerschaltung mit einer logarithmischen Verstärkungscharakteristik wird genutzt, um einen groben Überblick über die Amplitude des Echosignals zu erhalten. Sein Ausgangssignal wird in einem nachfolgenden Analog-Digital-Umsetzer genutzt, um ein Steuersignal für einen geregelten Dämpfungssteller (Attenuator) zu erzeugen. Dieses Signal wird gleichzeitig an den Radarsignalprozessor geleitet, damit der aktuelle Stand des Dämpfungsstellers in der Berechnung der Amplitude berücksichtigt werden kann. Dieser Analog-Digital-Umsetzer muss extrem schnell sein, damit die Dämpfung noch auf das aktuelle Echosignal wirken kann. Es werden Flash-ADC-Schaltkreise verwendet, die eine Verzögerung im Bereich einer Nanosekunde aufweisen.
Das Eingangssignal für den linearen Empfängerschaltung muss vor diesem Dämpfungssteller um exakt diese interne Laufzeit verzögert werden, um Schaltspitzen zu vermeiden. Dieser Empfänger ist meist ein Doppelsuperheterodynempfänger mit zwei verschiedenen Zwischenfrequenzen. Das lässt eine relativ große Bandbreite bei gleichzeitig guter Selektion der Empfangsfrequenz zu. Im Schaltbild ist manchmal trotzdem nur eine Abwärtsmischung zu erkennen, weil oft bereits die zweite Zwischenfrequenz digitalisiert wird und die nachfolgende Demodulation dann durch die Software geschieht.
Sichtgeräte
Konventionelles Wetterradar nutzte prinzipiell eine Kathodenstrahlröhre als Panoramasichtgerät (englisch: Plan Position Indicator, PPI) mit einer landkartenähnlichen Darstellung. Moderne Monitore und Bildschirme sind meist nur noch als Computerdisplays oder in Spezialfällen (im Cockpit) als kleine LC-Displays ausgeführt.
In welcher Höhe sich die reflektierenden Schichten befanden, war auf dem Panoramasichtgerät (oder dem PPI-Scope) nicht ohne Weiteres erkennbar. Ein reines PPI-Bild hatte den Nachteil, dass es nur die Reflektivitäten eines ganz bestimmten Höhenwinkels darstellen konnte (meist dem untersten). Diese Darstellung wird als Base Reflectivity bezeichnet. Die Echosignale stammen also von Wolken oder Niederschlag aus einer unterschiedlichen Höhe, die abhängig von der Entfernung ist. Die Messergebnisse aus dem Nahbereich waren somit unterrepräsentiert. Ein zusätzliches Sichtgerät als RHI-Scope konnte in einem einzelnen Seitenwinkel alle Höhenwinkel übereinander anzeigen. Um den Mangel der Unterrepräsentation von Bereichen zu beheben, wurde die Composite Reflectivity eingeführt. Sie ist ein zusammengefügtes Bild der Reflektivität. Anfangs wurde einfach in dem jeweiligen Seitenwinkel nur der Höhenwinkelscan mit der stärksten Reflektivität angezeigt. In dem PPI-Bild können verschieden bearbeitete Reflektivitäten oder lokale Windgeschwindigkeiten dargestellt werden. Es ist ebenso möglich, aufsummierte Regenmengen innerhalb eines Zeitraumes darzustellen, wozu aber zusätzlich andere Datenquellen zum Radar genutzt werden müssen.
Mit fortschrittlicherer Signalverarbeitung war es möglich, die Echosignale als einen einzigen Höhenschnitt darzustellen. Dieses Sichtgerät wurde Constant Altitude Plan Position Indicator (CAPPI) genannt und ist ebenfalls eine Version mit Composite Reflectivity. CAPPI ist eine horizontale zweidimensionale Darstellung von Radarmessgrößen in einer bestimmten Höhe (oder Altitude). Ein CAPPI wird aus mehreren PPI-Messungen bei verschiedenen Höhenwinkeln (Elevationen) berechnet und interpoliert. Wetterradarbilder, die im Internet veröffentlicht werden, sind meist solche PPI-Darstellungen als Composite Reflectivity in Falschfarben. Eine Farbcodierung der Echosignale kann alternativ entweder als Höhendarstellung oder als Darstellung der Reflektivität gewählt werden.
Eine weitere Darstellungsmöglichkeit wird Vol-CAPPI (englisch: Volume Constant Altitude Plan Position Indicator) genannt und erlaubt eine eindeutige Echozuordnung in allen drei Rissen. Neben einem Grundriss wird zusätzlich ein Aufriss (die Vorderansicht; entspricht einem Seitenriss von Ost nach West) und ein Kreuzriss (die Seitenansicht; entspricht einem Seitenriss von Nord nach Süd) gezeigt. Mit Hilfe eines Fadenkreuzes lassen sich die Positionen dieser Schnitte beliebig auswählen.
In einem MAX-CAPPI werden Maxima der Daten von CAPPI aus verschiedenen Höhen dargestellt. Die Max-CAPPI-Darstellung dient im Allgemeinen dazu, einen Überblick über das Wettergeschehen zu geben. Dies geschieht einerseits durch eine Vertikal-Maximumprojektion in einem (Bild-)Aufriss, andererseits durch Horizontal-Maximumprojektionen von Süd nach Nord beziehungsweise von West nach Ost in Seitenrissen. In den Seitenrissen gibt die seitliche Skala die Höhe in km an. In einem MAX-CAPPI werden meist Reflektivitäten dargestellt.
Das Radarbild wird aus den Werten einzelner Volumen zusammengesetzt. Es ist normalerweise eine stark gepixelte Darstellung, da die kleinsten Volumen Kantenlängen in der Größenordnung mehrerer hundert Meter haben. Für die Präsentation in den Medien wird das Bild gerendert und die Zwischenwerte interpoliert. Diese Berechnungen werden von speziellen Computerprogrammen, zum Beispiel der Radar-Software „RadVis“ auf der Grundlage der vom DWD bereitgestellten und gespeicherten Radardaten durchgeführt. In der Regel liegt das neueste Radarbild rund drei Minuten nach jeder vollen Viertelstunde vor.[22]
Eine echte Volumendarstellung zeigt eine 3D-Berechnung aller zur Verfügung stehenden Informationen. Trotz aller Anschaulichkeit ist für einen Meteorologen solche 3D-Darstellung wenig zweckmäßig, da gezielte Messungen innerhalb von Teilbereichen der im Bild gezeigten Superzelle eines Gewitters nicht möglich sind.
 Erste PPI-Darstellungen konnten nur fotografisch gespeichert werden.
Erste PPI-Darstellungen konnten nur fotografisch gespeichert werden.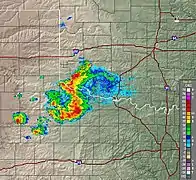 modernere PPI-Darstellung mit Base Reflectivity
modernere PPI-Darstellung mit Base Reflectivity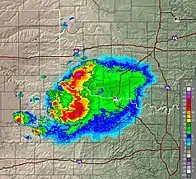 Gleiches Bild mit Composite Reflectivity
Gleiches Bild mit Composite Reflectivity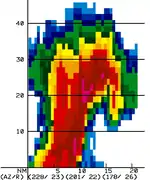 Range-Height-Indicator (RHI) mit einer Superzelle eines Gewitters
Range-Height-Indicator (RHI) mit einer Superzelle eines Gewitters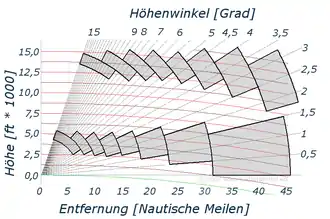 Berechnung eines CAPPI aus den Reflektivitäten verschiedener Entfernungen und Höhenwinkel
Berechnung eines CAPPI aus den Reflektivitäten verschiedener Entfernungen und Höhenwinkel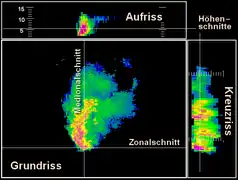 Elemente eines Vol-CAPPI, einer Normalprojektion von Wetterradardaten
Elemente eines Vol-CAPPI, einer Normalprojektion von Wetterradardaten
Vernetzung
Alle Radargeräte des Deutschen Wetterdienstes sind mit Großrechnern vernetzt. Auf diese Weise kann eine Zusammenstellung (Komposit) der Daten weit über die individuellen Reichweiten der Radargeräte hinaus vorgenommen werden und die Radardaten gewinnen an Konsistenz. Dual-Doppler-Messungen oder Dual-Doppler-Analysen sind Zusammenstellungen der Daten von zwei oder mehrerer benachbarter Doppler-Radargeräte. Mit diesen simultan von unterschiedlichen Standorten gemessenen Radialgeschwindigkeiten kann zusätzlicher Informationsgewinn bei der Bestimmung des horizontalen oder des dreidimensionalen Windfelds erreicht werden. Bei einem Abstand der Radargeräte zwischen 30 und 60 km besteht eine günstige Messgeometrie.

In den USA, wo aufgrund der großen zu überbrückenden Entfernungen kein sehr dichtes Netz an Wetterradargeräten aufgebaut werden kann, werden zur speziellen Untersuchung von Hurricanen und Tornados viele kleinere mobile Radargeräte eingesetzt. Das komplette Wetterradar ist auf kleineren Lastkraftwagen montiert und wird durch Dieselaggregate gespeist. Diese Kampagne wird Doppler radars On Wheels (DOW) genannt (auf Deutsch: Doppler-Radar auf Rädern). Damit die Antenne trotz hoher Richtwirkung möglichst klein bleibt, werden die Frequenzbänder X, K oder W genutzt. Mit diesen mobilen Radargeräten kann direkt zum Ort des Geschehens gefahren und dort innerhalb von Minuten mit den Messungen begonnen werden. Das ermöglicht Messungen bis etwa 50 m über Grund und einen großen Detailreichtum der Messwerte.
Bistatische Radarsysteme
Ein bistatisches Radargerät betreibt den Sender und den Empfänger an unterschiedlichen Standorten. Aus einem monostatischen Niederschlagsradar (Sender und Empfänger am gleichen Standort) kann ein bistatisches Radarsystem aufgebaut werden, indem mehrere passive Empfänger im Umkreis eines monostatischen Niederschlagsradars aufgestellt werden. Auf diese Weise wird zusätzlicher Informationsgewinn erzielt. Je mehr Antennendiagramme dieser passiven Empfänger sich überlappen, desto genauer wird die Ermittlung des dreidimensionalen Windfeldes. Solche bistatischen Systeme sind wesentlich preiswerter als mehrere monostatische Radargeräte in dichtem Abstand. Nachteilig ist, dass die Geometrie sehr viel komplexer und fehleranfälliger wird (zum Beispiel durch Nebenkeulen).
Radargleichung für Volumenziele
Die theoretische Reichweite eines jeden Radargerätes wird mit Hilfe der Radargrundgleichung bewertet. Die Radargrundgleichung ist unabhängig von der Modulationsart sowie unabhängig davon, ob es sich um ein Impulsradar oder ein Dauerstrichradar handelt. Daher ist sie ebenfalls für Wetterradargeräte nutzbar. Sie setzt die Leistung im empfangenen Echosignal in Relation zur Sendeleistung.[23][12] Im Falle der Anwendung eines Sendeimpulses geht die Radargrundgleichung hier vorerst davon aus, dass die Länge des gesendeten Impulses mit der Länge des empfangenen Echosignales identisch ist. Somit können statt des Energiegehaltes des Impulses Leistungen betrachtet werden.
| (1) | Hierbei bedeuten: |
Pr = Empfangsleistung |

Da diese Ausgangsgleichung für den Fall der Berechnung einer maximalen Reichweite eines Radargerätes hergeleitet wurde, ist noch für die effektive Reflexionsfläche die Referenz σ0 eingesetzt. Das ist die effektive Reflexionsfläche von 1 m², verursacht durch eine metallische Kugel mit einem Durchmesser von 1,4 m. In diesem Fall wird in dieser Gleichung meist die Reichweite als eine Unbekannte ermittelt, indem die Gleichung nach r4 aufgelöst wird und als Empfangsleistung die maximale Empfängerempfindlichkeit eingesetzt wird. In dem folgenden Fall ist aber die Reichweite durch die Laufzeitmessung jeweils bekannt und es soll der Zusammenhang zwischen der Leistung des empfangenen Echosignals und die Veränderlichkeit der effektiven Reflexionsfläche eines Volumenzieles abhängig zur Entfernung untersucht werden.
Dazu werden zunächst aus der allgemeinen Form alle Parameter, die bei einem Radar konstruktiv vorgegeben und nicht variabel sind (zum Beispiel Sendeleistung, Wellenlänge, Verluste …) zu einem konstanten Faktor β zusammengefasst:
| (2) | Hierbei bedeuten: |
Pr = Empfangsleistung |

Bei einem Wetterradar ist die effektive Reflexionsfläche kein punktartiges Ziel, sondern ein Volumenziel. Bei einem Volumenziel wird das gesamte Impulsvolumen V vollständig durch statistisch verteilte reflektierende Objekte ausgefüllt. Im Idealfall bilden diese ein für Mikrowellen halbtransparentes Medium. Ein Teil der Sendeenergie wird reflektiert, ein Teil wird leicht bedämpft weitergeleitet. Die Summe aller reflektierenden Flächen in einer Volumeneinheit (1 m³) wird hier mit der temporären Variablen η bezeichnet und kann als Summe der Reflexionsflächen aller in dieser Volumeneinheit auftretenden Streuobjekte angesehen werden:
| (3) | Hierbei bedeuten: |
η = Reflektivität ausgedrückt als effektive Reflexionsfläche pro Volumeneinheit |

Die Variable η kann weiterhin beschrieben werden als:
| (4) | Hierbei bedeuten: |
N = Die Anzahl der Streuobjekte in der Volumeneinheit |

Es wird jetzt nicht mehr von Reflexionsflächen gesprochen, sondern von Streuobjekten. Meistens ist keine homogene Struktur vorhanden, sondern ein Gemisch aus verschiedenen Objekten.
Die am Ende vom Radar registrierte reflektierte Energie wird nicht nur durch eine Reflexion verursacht, sondern auch durch Beugung, Brechung und die nachfolgende Überlagerung der einzelnen Anteile der zerstreuten Energie in eine bestimmte Richtung (hier die Richtung zurück zur Radarantenne). Ob überwiegend eine Reflexion oder überwiegend Beugung und Brechung stattfindet, hängt von der Größe und den elektrischen Eigenschaften der Streuobjekte ab.
Untersucht werden kann das Verhältnis der Größe der Streupartikel zur Wellenlänge des Wetterradars. Gustav Mie entwickelte eine Theorie über die elastische Streuung einer ebenen elektromagnetischen Welle an sphärischen Objekten. Diese nach ihm benannte Mie-Streuung trifft teilweise auf das Streuverhalten in einem Niederschlagsgebiet zu. Ein direkt reflektierter Anteil wird sich mit einem um den Umfang des Wassertropfen umlaufend gebeugten Anteil der Energie überlagern. Das kann bei Phasengleichheit zur Verstärkung wie auch bei entgegengesetzter Phase zur Abschwächung des reflektierten Anteils führen. Die zurückgestreute Energie ist damit abhängig vom Radius a (der sonst übliche Buchstabe r ist hier schon für die Entfernung vergeben) des Regentropfens, der Wellenlänge λ des Wetterradars und dem komplexen Brechungsindex m des Tropfens. Das Verhältnis bestimmt, ob das Objekt mehr zerstreut oder mehr reflektiert. Große Tropfen können sehr groß gegenüber der Wellenlänge sein und sich damit in der sogenannten „optischen Region“ befinden. Kleinere Tropfen können sich in Resonanz befinden, wenn sie eine Größe im Bereich der Wellenlänge haben. Das ist der sogenannte Mie-Bereich. Sind sie sehr viel kleiner als die Wellenlänge, im Bereich ≤ λ/10, so befinden sie sich in der sogenannten Rayleigh-Region.[24]

Niederschlagsradargeräte benutzen Wellenlängen von 10 cm (mittleres S-Band) bis 3 cm (X-Band). Wolkenradar nutzt Frequenzen oberhalb von 40 GHz, was einer Wellenlänge von kleiner als 8 mm entspricht. Die zu erwartende Regentropfengröße von 0,1 mm bis etwa 5 mm wird sich bei einem Niederschlagsradar immer in der Rayleigh-Region befinden. Für diese Region gilt die folgende Näherung für die effektive Reflexionsfläche eines einzelnen Tropfens:
| (5) | Hierbei bedeuten: |
|K|2 = errechnet sich aus dem Brechungsindex m gemäß |


Der Ausdruck |K|2 wird in der Folge als Konstante behandelt, die für Wassertropfen etwa 0,93 und für Eis etwa 0,197 beträgt. Diese Gleichung kann in die Vorangegangene eingesetzt werden. Die konstanten Faktoren werden als Multiplikatoren aus der Summe herausgezogen. Die temporäre Variable η als die Summe der Reflexionsflächen aller in einer Volumeneinheit auftretenden Streuobjekte berechnet sich mit:
(6)

Aus dieser Gleichung heraus kann die Reflektivität Z definiert werden. Sie ist gleich dem Ausdruck in dieser Gleichung mit dem Summenzeichen. Deren Maßeinheit ergibt sich aus der Dimension des Durchmessers der Wassertropfen in [mm] pro Volumeneinheit [m3]. Natürlich könnte das rein mathematisch gekürzt werden, jedoch da der Tröpfchendurchmesser in der sechsten Potenz steht und in Kubikmeter umgerechnet werden müsste, würde sich als Ergebnis eine sehr unhandliche Zahl mit Zehnerpotenzen ergeben. Deshalb ist es üblich, diese gegebenen Maßeinheiten beizubehalten. Die Reflektivität Z hat damit die feste Maßeinheit [mm6/m3].
Die zweite Größe aus der Gleichung (3) ist das Impulsvolumen V. Es setzt sich zusammen aus einem Ausschnitt aus einer Kugeloberfläche, die durch einen horizontalen Winkel θ und einen vertikalen Winkel φ bestimmt wird. Das ist hier die jeweilige Halbwertsbreite der Hauptkeule der Antenne. Die dritte Koordinate zu einem Volumen ergibt sich aus der Sendeimpulsdauer τ und der Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen, also der Lichtgeschwindigkeit c.
| (7) | Hierbei bedeuten: |
φ = vertikaler Öffnungswinkel des Antennendiagramms |

Diese Beschreibungen aus den beiden Elementen der Gleichung (3) ersetzen in der Gleichung (2) die effektive Reflexionsfläche σ:
(8)


Nach Auflösung der in der Konstanten β zusammengefassten Parameter des Wetterradars erscheint die Radargrundgleichung in der Form:
(9)



Beim Zusammenfassen und Kürzen wurde gleich darauf geachtet, dass feste Geräteparameter oder Konstanten in dem vorderen Bruch auftreten. Diese Parameter und Konstanten können erneut in einer für das Radargerät individuellen Konstante (zum Beispiel β′) zusammengefasst werden. Übrig bleiben danach neben dieser Konstante nur noch die Variablen
- Reflektivität Z und
- die umgekehrte Proportionalität zum Quadrat der Entfernung, 1/r2.
Die Konstante (hier β′) wird für jedes Wetterradargerät individuell (also nicht nur typgebunden) in Tabellenform für verschiedene Niederschlagsformen kalibriert abgelegt, so dass die Software leicht auf diese Daten zugreifen kann. Die für Volumenziele gültige umgekehrte Proportionalität zum Quadrat der Entfernung (1/r2) der empfangenen Energie ist im Gegensatz zu der (1/r4)-Abhängigkeit für Punktziele zu sehen, die in Gleichung (1) genannt ist. Wenn alle anderen Parameter gleich oder vergleichbar sind und die Reflektivität Z eine vergleichbare Größe mit der als Referenz genutzten effektiven Reflexionsfläche σ0 hat, dann ergibt sich aus der Proportionalität 1/r2 die wesentlich größere maximale Reichweite von Wetterradargeräten gegenüber Luftraumaufklärungsradargeräten.[18]
Bei der Verwendung der intrapulse modulation erzielt das Radar eine um den Pulskompressionsfaktor größere Reichweite. Da der Pulskompressionsfaktor abhängig von der Bandbreite des Sendesignals ist, kann er entweder direkt als Faktor in die Radargleichung einfließen oder als Abhängigkeit von der Senderbandbreite formuliert werden (Zeit-Bandbreite-Produkt).
Bildergalerie Wetterradar
 Forschungsradar POLDIRAD des Deutschen Zentrums für Luft- und Raumfahrt
Forschungsradar POLDIRAD des Deutschen Zentrums für Luft- und Raumfahrt Meteor 1500S in Adelaide (Australien)
Meteor 1500S in Adelaide (Australien) Meteor 1500S in Gwangdeok (Korea)
Meteor 1500S in Gwangdeok (Korea) Meteor 1500S in Seongsan-po (Korea)
Meteor 1500S in Seongsan-po (Korea) Doppler-Radar WSR-88D bei New Underwood, South Dakota vor der Superzelle eines Gewitters
Doppler-Radar WSR-88D bei New Underwood, South Dakota vor der Superzelle eines Gewitters
Weblinks
Einzelnachweise
- Jens Grenzhäuser: Entwicklung neuartiger Mess- und Auswertungsstrategien für ein scannendes Wolkenradar und deren Anwendungsbereiche. KIT Scientific Publishing, 2011, ISBN 978-3-86644-775-2. (eingeschränkte Vorschau in der Google-Buchsuche)
- David Atlas: Radar in meteorology. Battan Memorial and 40th Anniversary Radar Meteorology Conference. Amer Meteorological Society, 1990, ISBN 978-0-933876-86-6.
- R. M. Lhermitte, D. Atlas: Precipitation motion by pulse doppler radar. In: 9th Weather Radar Conf. AMS, Boston 1961.
- R. J. Doviak, Dušan S. Zrnić: Doppler radar and weather observations. Academic Pr, 1984, ISBN 0-12-221420-X, S. 260.
- J. H. Richter: High Resolution Tropospheric Radar Sounding. In: Radio Science. 4, Nr. 12, 1969, S. 1261–1268.
- D. E. Barrick: FM/CW radar signals and digital processing. NOAA Technical Report ERL 283-WPL 26, 1973.
- R. B. Chadwick, K. P. Moran, R. G. Strauch, G. E. Morrison, W. C. Campbell: A New Radar for Measuring Winds. In: Bulletin of the American Mathematical Society. 57, Nr. 9, 1976, S. 1120–1125.
- R. G. Strauch: Theory and Applications of the FM-CW Doppler Radar. Ph.D thesis, University of Colorado, 1976.
- Howard B. Bluestein: Severe Convective Storms and Tornadoes. Observations and Dynamics. Springer Verlag, 2012, ISBN 978-3-642-05380-1, S. 429.
- D. S. Zrnić: Weather radar polarimetry: Trends toward operational applications. In: Bulletin of the American Meteorological Society, vol. 77, 1996, S. 1529–1534.
- V. N. Bringi, T. A Seliga, K. Aydin: Hail detection with a differential reflectivity radar. In: Science, vol. 225, 1986, S. 1145–1147.
- Merrill Skolnik: Radar Handbook, Third Edition. McGraw-Hill Professional, 2008, ISBN 978-0-07-148547-0, S. 19.14.
- Transportation Department, Federal Aviation Administration, Flight Standards Service: Advanced Avionics Handbook, 2009 Government Printing Office, ISBN 978-0-16-086923-5, S. 5–9 bis 5–11 (eingeschränkte Vorschau in der Google-Buchsuche)
- Datenblatt eines Multifunktionsradardisplay der Firma Honeywell mit beispielhaften Anzeigen von TCAS und Navigationshilfen auf dem Radardisplay
- John Croft, „NASA Advances Single-Pilot Operations Concepts“, in Aviation Week & Space Technology, 12. Januar 2015 (online)
- Wikiversity: Radarverbund des DWD
- Vaisala, neue Signalverarbeitungstechnik für polarimetrisches Wetterradar PDF online
- Vergleich der Radargeräte ASR-910 und NEXRAD (Daten NEXRAD: siehe Merrill Skolnik: Radar Handbook, Third Edition. McGraw-Hill Professional, 2008, ISBN 978-0-07-148547-0, S. 19.16.)
- Wetterradar im DWD – Radarstandorte und Messprinzip www.dwd.de
- Das Dopplerdilemma, beschrieben im Radartutorial, abgerufen am 12. Oktober 2019.
- Datenblatt des Wetterradars Meteor 1700C von Gematronik, Neuss (online)
- Interaktiver Radar-Analyse-Service (IRAS) von www.skywarn.de
- Herleitung der Radargrundgleichung auf dem Radartutorial
- Mie-Streuung vs. Rayleigh-Streuung bei Radargeräten im Radartutorial, abgerufen am 15. Oktober 2019.