Streckenlast
Eine Streckenlast ist eine längenbezogene Belastung (z. B. in Newton pro Meter). Der Begriff findet sich in der technischen Mechanik, insbesondere der Statik, aber auch in der technischen Dynamik.

i. d. R. ist eine Streckenlast jedoch nicht konstant (gleich) über die Strecke
Die Streckenlast ist im Allgemeinen eine rechnerische Idealisierung
- einer Volumenkraft (z. B. Eigengewicht), die möglichst wirkungsäquivalent auf die Stabsachse zugeteilt wird, oder
- einer Oberflächenspannung, die über den Einflussbereich aufintegriert, zu einer Last bezogen auf die Länge des zugehörigen Stabsachsenabschnittes wird.
Eine Streckenlast hat die Dimension Kraft pro Länge:

mit der Querkraft .

Definition
Eine Streckenlast für ein statisches System[1] berechnet sich aus dem Integral der Volumenkraftdichten über den Querschnitt und dem Integral der Oberflächenspannungen über die Oberfläche:


mit
- dem Steckenlastvektor
- der Komponente in -Richtung
- der Komponente in -Richtung
- der Komponente in -Richtung
- der Volumenkraftdichte , z. B. Eigenwichte
- der Dichte
- dem Schwerefeld
- der Querschnittsfläche
- der Oberflächenspannung , z. B. Oberflächendruck zufolge einer Kontaktkraft mit einem anderen Kontinuum
- dem Normalenvektor
- dem Umfang des Querschnitts.















Allgemeine Streckenlasten
Eine allgemeine Streckenlast ist eine beliebige Funktion, beispielsweise eine Fourierreihe. Eine Streckenlast als Fourierreihe kann Einzellasten oder Biegemomente beliebig genau ersetzen.

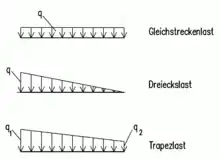
Eine Dreieckslast ist eine Streckenlast, die an einem Ende gegen einen Wert von strebt und bis zum anderen Ende mit einer konstanten (evtl. negativen) Steigung steigt.

Eine Trapezlast ist eine Streckenlast, bei der gilt: . Man kann sie zusammensetzen aus einer Gleichstrecken- und einer Dreieckslast.

Gleichstreckenlast
Eine Gleichstreckenlast ist eine Streckenlast, welche über dem jeweiligen Stabachsenbereich einen konstanten Wert hat:

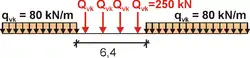
Eine Gleichlast stellt manchmal zwar ein unrealistisches Belastungsbild dar, dient jedoch trotzdem einer realitätsnahen Bemessung. Ein Beispiel hierfür ist das Lastmodell 71 im Eisenbahnwesen, bei dem die Radlasten, die in guter Näherung Einzellasten darstellen, als Gleichlast modelliert werden. Mit diesem Lastmodell werden in guter Näherung die Lastumhüllenden aller üblichen Lasten mit zugehörigen Radabständen auf der sicheren Seite abgebildet.
Superposition
- qges = q1⊕q2⊕q3⊕…⊕qn
- darin bedeutet ⊕: "ist zu überlagern mit".
In der Theorie I. Ordnung oder bei linearen Problemen folgt somit:
- qges = ∑qi

Biegetheorie
Aus den Gleichgewichtsbedingungen mit Bezug auf die unverformten Lage, also in der Theorie I. Ordnung, folgt:
- [2][3]
- [2]
- [kN*m]...Biegemoment (Spannungsresultante)
- m(x) [kN*m/m]...externes Moment pro Längeneinheit (Momentenbelastung pro Länge)



Einzelnachweise
- Also ein System, bei dem in einem Galileischen Bezugssystem keine Beläunigungskräfte wirken.
- Bernhard Pichler, Josef Eberhardsteiner: Baustatik VO – LVA-Nr. 202.065. Hrsg.: E202 Institut für Mechanik der Werkstoffe und Strukturen – Fakultät Bauingenieurwesen, TU Wien. SS 2016 Auflage. TU Verlag, Wien 2016, ISBN 978-3-903024-17-5, Drehwinkelverfahren (520 S., online – Erstausgabe: 2012). online (Memento des Originals vom 13. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Diese Beziehung findet sich schon 1851 in elementarer Form bei Johann Wilhelm Schwedler (s.Karl-Eugen Kurrer: The History of the Theory of Structures. Searching for Equilibrium. Berlin: Ernst & Sohn, S. 449, ISBN 978-3-433-03229-9)