Balkentheorie
Die Balkentheorie beschreibt das Verhalten von Balken unter Belastung. Sie ist ein Teilgebiet der technischen Mechanik. Insbesondere wird mithilfe der Festigkeitslehre und der Elastizitätslehre die elastische Biegung eines Balkens untersucht, weshalb man auch von der Biegetheorie des Balkens spricht.
Sie wird in den Ingenieurwissenschaften Bauingenieurwesen und Maschinenbau entwickelt und angewendet.
Die Belastungsgrößen sind neben dem Biegemoment auch Längs- und Querkräfte sowie Torsionsmomente. Die Biegung ist zudem von der Geometrie des Balkens (Querschnitt, evtl. über Länge veränderlich) und seiner Lagerung sowie der Elastizität des Balken-Werkstoffs abhängig. Festigkeitswerte des Materials bestimmen den Übergang zu plastischer Biegung und Biegebruch.
Die Balkentheorie wurde im Laufe der Zeit schrittweise verfeinert. Der Biegevorgang wurde dabei immer besser modelliert, die Handhabung der Theorie aber aufwändiger. In den meisten Anwendungen werden mit der Klassischen Biegelehre[1] (Theorie I. Ordnung) ausreichend genaue Ergebnisse errechnet.
Grundzüge
Näherungsschritte
Allgemein unterscheidet man
- Balkentheorie Erster Ordnung
- Es wird am unverformten Balken ein Balkenelement betrachtet, Kräfte und Momente werden bilanziert. In den meisten Fällen stimmt das Ergebnis hinreichend mit der Wirklichkeit überein. (I. A., wenn die Knicklast unter 10 % der idealen Knickdrucklast ist.)
- linearisierte Balkentheorie Zweiter Ordnung
- Es wird am verformten Balken ein Balkenelement betrachtet; das mathematische Modell wird linearisiert. Sie wird für Stabilitätsprobleme benötigt, sowie für große Durchbiegungen bei Neigungswinkeln bis zu einem Rotationswinkel von betragsmäßig 0,1 rad.[2]
- Balkentheorie Dritter Ordnung
- Es wird am verformten Balken ein Balkenelement betrachtet; das mathematische Modell wird nicht linearisiert. Sie wird in Sonderfällen benötigt, bei sehr großen Durchbiegungen und Neigungswinkeln über ca. 20°.
In der Balkentheorie Zweiter Ordnung können je nach Literatur auch nichtlineare Terme berücksichtigt werden, deshalb ist die Grenze zwischen Theorie Zweiter und Theorie Dritter Ordnung fließend.
Klassische Annahmen: die Bernoullischen Annahmen
Inhalt der Bernoullischen Annahmen ist:
- Der Balken ist schlank: seine Länge ist wesentlich größer als seine Querschnittsabmessungen.
- Balkenquerschnitte, die vor der Deformation senkrecht auf der Balkenachse standen, stehen auch nach der Deformation senkrecht auf der deformierten Balkenachse.
- Querschnitte bleiben auch nach der Deformation in sich eben.
- Die Biegeverformungen sind klein im Vergleich zur Länge des Balkens (maximal in der Größe der Querschnittsabmessungen).
- Der Balken besteht aus isotropem Material und folgt dem Hooke'schen Gesetz.
Man spricht bei der (näherungsweisen) Erfüllung dieser Voraussetzungen auch von einem Euler-Bernoulli-Balken. Dabei handelt es sich aber um Modellannahmen, die bei realen Balken nur mehr oder weniger genau erfüllt sind. In der wirklichen Welt gibt es keinen Balken, der diesem Modell genau entspricht.
Die Annahmen 2. u. 3. treten i. A. nie bei belasteten Balken auf, jedoch wenn die Annahmen/Folgen 2. u. 3. in einer Näherung zulässig sind, liegt z. B. ein Balken vor, der unter dem Stichwort Timoschenko-Balken behandelt wird.
Bei ausschließlicher Belastung in Längsrichtung kann ein Stab in der Stabtheorie I. Ordnung zufolge eines Festigkeitskriteriums (zufolge Normalkraft und Biegung) versagen; in der Stabtheorie II. Ordnung ist dieses Festigkeitskriterium in der verformten Lage zu erfüllen; damit ermöglicht sie eine Aussage über ein eventuelles Stabilitätsversagen durch seitliches Ausknicken (Knickstab). Des Weiteren wird bei Bernoulli-Balken im Allgemeinen auch Versagen durch Querkraft ausgeschlossen.
Im Übrigen haben Balken oft über deren ganze Länge konstante Querschnittseigenschaften (konstanten Querschnitt, Elastizitätsmodul, …), da diese herstellungstechnisch, als auch rechnerisch einfacher zu handhaben sind.
Theorie Erster Ordnung: Statik
Die Klassische Theorie deckt sich im Wesentlichen mit der Theorie erster Ordnung, wobei mit Gleichgewichtsbedingungen an Querschnittsflächen des unverformten Balkens gearbeitet wird, deren Ebenbleiben von der Theorie vorausgesetzt wird.
Statische Bestimmtheit
Bei statisch bestimmt gelagerten Balken lassen sich die Auflagerkräfte und Schnittgrößen aus den Gleichgewichtsbedingungen bestimmen. Bei statisch überbestimmten[3][4][5] Balken sind zusätzlich zu den Gleichgewichtsbedingungen auch Verträglichkeitsbedingungen zu erfüllen, um die Auflagerkräfte und Schnittgrößen bestimmen zu können. Im einfachsten Fall wird ein Balken anhand der Gleichung der Biegelinie, einer linearen inhomogenen Differentialgleichung, berechnet. Sie stellt einen Zusammenhang zwischen der Durchbiegung (in -Richtung) und der Querbelastungen (Streckenlast , Einzellast quer zum Träger, Einzelmoment, …) als Funktion der Koordinate entlang der Balkenachse her.




- .

Biegesteifigkeit
Die Biegesteifigkeit gibt an, wie groß das Biegemoment im Verhältnis zur Krümmung ist. Für homogene Querschnitte ergibt sie sich als Produkt aus dem Elastizitätsmodul des Materials und dem geometrischen Flächenträgheitsmoment des gegebenen Querschnitts. Letzteres berechnet sich als



- wobei und die orthogonalen Koordinaten vom Schwerpunkt weg gemessen sind.


Für einen Balken mit rechteckigem Querschnitt (in - respektive -Richtung) ist

- .

Rand- und Übergangsbedingungen ergeben sich aus der Art der Auflager und bestehen aus kinematischen Randbedingungen und aus dynamischen (Kräfte und Momente betreffenden) Randbedingungen.
Für die dynamischen Randbedingungen ist relevant, welcher Zusammenhang zwischen der Durchbiegung und den Schnittlasten besteht, nämlich

Querkraft:

Biegespannung
Das Biegemoment setzt sich aus Biegespannungen zusammen, dies sind in axialer Richtung wirkende Spannungen mit einer über den Stab veränderlichen Verteilung von Normalspannungen:
Im einfachsten Fall geht man in der Balkentheorie von der Bernoullitheorie aus, welche Ebenbleiben der Querschnitte voraussetzt, in Kombination mit einem linear elastischen Materialverhalten. Diese Vereinfachung führt zu der Formel:

Falls das Deviationsmoment Iyz gleich Null ist folgt für den Spannungsanteil zufolge Biegung:

Darin ist das Flächenträgheitsmoment des Querschnitts um die Achse, um die das Biegemoment dreht. Den Kennwert beim maximalen (an der äußersten Faser des Querschnitts) nennt man auch Widerstandsmoment . Daraus folgt ein recht bekanntes Ergebnis: die Tragfähigkeit eines Balkens ist proportional zu .



Im Falle unsymmetrischer Querschnitte muss das Koordinatensystem in Richtung der Hauptträgheitsachsen gedreht werden, damit man die Biegung in beiden Richtungen getrennt voneinander berechnen kann. Beispiel: wenn ein L-Profil von oben belastet wird, biegt es sich im Allgemeinen direkt proportional auch zur Seite hin durch. Nur in Richtung einer der beliebigen Hauptträgheitsachsen biegt sich ein Balken ausschließlich in Richtung der Belastung.
Wie stark sich ein Balken verbiegt, hängt ferner sehr stark von der Position der Auflager ab; bei gleichmäßiger Belastung =const erhält man aus der Differentialgleichung als optimale Lagerpositionen die Bessel-Punkte.

Die Biegespannung im Besonderen beschreibt die Kraft, welche auf den Querschnitt (z. B. eines Balkens) wirkt, der senkrecht zu seiner Ausdehnungsrichtung belastet wird.
Die Normalspannung im Balkenquerschnitt ist:

Wenn die Deviationsmomente Null sind und man eine einfache Biegung in z-Richtung ohne Normalkraft hat, folgt:

Ist das Moment My positiv, treten bei reiner Biegebeanspruchung durch My für > 0 Zug- und für < 0 Druckspannungen auf. Die betragsmäßig größte Spannung tritt bei reiner Biegebeanspruchung durch My demnach in der äußersten Faser auf.

Das Widerstandsmoment ist ein reiner Querschnittswert und gibt das Verhältnis vom angreifenden Moment zur zugehörigen Spannung in der „kritischen“ Faser an


Dabei beschreibt das Flächenträgheitsmoment. Für die maximale Biegespannung ergibt sich:

Je größer der Betrag des Widerstandsmomentes ist, desto kleiner ist der Betrag der Biegespannung in der Randfaser.
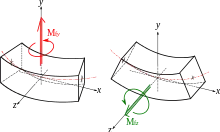
Beim Biegen eines Balkens werden seine auf der Zugseite liegenden Längsfasern (vorne im nebenstehenden Bild, linkes Teilbild) gedehnt und seine auf der Druckseite liegenden gestaucht (hinten im nebenstehenden Bild, linkes Teilbild). In den gedehnten Fasern entstehen Zugspannungen, in den gestauchten Druckspannungen. Der Spannungsverlauf von den außen maximalen Zug- zu den innen maximalen Druckspannungen ist i. d. R. nichtlinear, jedoch ist die lineare Verteilung eine häufige Annahme.
Bei relativ kleiner Biegung und keiner Normalkraft befindet sich die neutrale (spannungsfreie) Faser in der Mitte der Balkenhöhe. Die Zug- und die Druckspannungen in einer Querschnittsfläche sind betragsmäßig gleich groß, sofern keine Normalkraft vorliegt.
Biegelinie des Balkens
Die Durchbiegung (Auslenkung) des Balkens an seiner Stelle ist mit folgender linearen Differentialgleichung beschreibbar:

Sie ist abhängig von der Belastung durch das Biegemoment , dem Flächenträgheitsmoment des Balkenquerschnitts und dem Elastizitätsmodul des Balkenmaterials (Index : Biegung um die Querachse ). Durch die erste Integration folgt die Neigung der Biegelinie aus ihrer Krümmung :






Bei der zweiten Integration entsteht aus der Neigung der Biegelinie ihre Auslenkung :

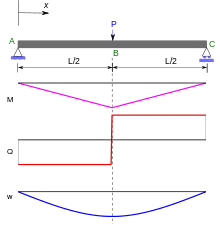

Im Beispiel eines an seinen beiden Enden aufliegender Balken mit mittiger Einzellast (nebenstehendes Bild) hat der Verlauf des Biegemomentes eine Knickstelle. Die Integration wird in diesem Fall für den linken und den rechten Balkenteil üblicherweise[8] getrennt durchgeführt. Der Zusammenschluss der beiden Ergebnisse zur stetig verlaufenden Biegelinie ergibt sich daraus, dass dort sowohl ihre Neigung als auch ihre Auslenkung für beide Teile gleich ist. Im Beispiel liegt Symmetrie (in der Biegelinie und Momentenlinie) vor. Die Integration z. B. der Differentialgleichung für die linke Hälfte genügt. Diese Hälfte lässt sich auch als in der Mitte eingespannter und am anderen Ende mit der Kraft (durch das Auflager) belasteter Kragbalken ansehen.

Für gelten:

- bei ist die Neigung gleich Null[9] →
- bei ist die Auslenkung gleich Null →
- , bei ist die Auslenkung gleich









Theorie Erster Ordnung: Dynamik
Bis hier wurde nur die Statik behandelt. Die Balkendynamik, etwa um Balkenschwingungen zu berechnen, basiert auf der Gleichung

Das Problem hängt hier nicht nur vom Ort , sondern zusätzlich von der Zeit ab. Es kommen zwei weitere Parameter des Balkens hinzu, nämlich die Massenverteilung und die Strukturdämpfung . Wenn das Bauteil unter Wasser schwingt, beinhaltet auch die hydrodynamische Masse, und in kann man eine linearisierte Form der hydrodynamischen Dämpfung einbeziehen, siehe Morison-Gleichung.



Theorie Zweiter Ordnung: Knickstab
Während bisher die Kräfte und Momente näherungsweise am unverformten Bauteil bilanziert wurden, ist es im Falle von Knickstäben erforderlich, ein Balkenelement im verformten Zustand zu betrachten. Knickstab-Berechnungen basieren auf der Gleichung

und zwar im einfachsten Fall mit . Hinzu kommt die axial im Knickstab wirkende Druckkraft , die je nach Randbedingungen die Knicklast nicht überschreiten darf, damit der Stab nicht ausknickt.


- Differenzialbeziehungen
In der schubweichen Balkentheorie Ⅱ. Ordnung gibt es unter den Bernoullischen Annahmen folgende Differentialgleichungen für die Queranteile:




mit
- der Laufkoordinate entlang der Balkenachse
- dem Elastizitätsmodul
- dem Schubmodul (Term tritt in der schubstarren Theorie nicht in den Differentialgleichungen auf)
- dem Flächenträgheitsmoment
- der Transversalkraft (in der Theorie I. Ordnung gilt )
- der Querkraft
- die Normalkraft nach Theorie Theorie Ⅱ. Ordnung (in der Theorie I. Ordnung tritt dieser Term in der Differenzialgleichung nicht auf)
- der Gleichlast (Querbelastung pro Längeneinheit[11])
- dem Biegemoment
- dem Steckemoment (Biegebelastung pro Längeneinheit[11])
- der Verdrehung
- der eingeprägten Krümmung
- der Durchbiegung zufolge Belastung
- der Durchbiegung zufolge Vorverformung
- der Schubfläche (Term tritt in der schubstarren Theorie nicht auf).













Theorie Dritter Ordnung
Bei der Theorie Dritter Ordnung werden auch große Verformungen erfasst, die Vereinfachungen der Theorie II. Ordnung gelten hier nicht mehr.
Ein Anwendungsfall, bei dem Balkentheorie Dritter Ordnung nötig wird, ist z. B. das Verlegen von Offshore-Pipelines von einem Wasserfahrzeug aus in großen Wassertiefen, hier nur als ebener statischer Fall wiedergegeben.
Ein sehr langer Rohrstrang hängt vom Fahrzeug zum Meeresboden herunter, ist gekrümmt wie ein Seil, jedoch biegesteif. Die nichtlineare Differentialgleichung lautet hier:

mit
- der Koordinate (Bogenlänge entlang der Pipeline)
- dem Neigungswinkel , der mit der Horizontalkoordinate und der Vertikalkoordinate in folgendem Zusammenhang steht:






- ist die entlang der Pipeline konstante Horizontalkomponente der Schnittkraft (Horizontalzug); H wird dadurch beeinflusst, wie stark das Fahrzeug mit seinen Ankern und dem Tensioner an der Pipeline zieht, damit sie nicht durchsackt und bricht; der Tensioner ist eine Vorrichtung aus zwei Raupenketten, die die Pipeline an Bord einspannt und sie unter Zugbelastung hält
- dem Gewicht pro Länge , abzüglich Auftrieb
- einer Rechengröße , die man sich als kleine Bodenauflagerkraft vorstellen kann.


Geschichte
Nach vorherigen vorwiegend gedanklichen Experimenten von Leonardo da Vinci wurde die Balkentheorie von Galileo Galilei begründet. Mit den Arbeiten von Claude Louis Marie Henri Navier wurde ein vorläufiger, klassische Balkentheorie genannter Abschluss erreicht.
„Väter“ der klassischen Biegetheorie von Leonardo da Vinci bis Navier:
- Leonardo da Vinci (1452–1519) – Zugversuche an Drähten
- Galileo Galilei (1564–1642) – Discorsi e dimostrazioni matematiche intorno a due nuove scienze attenenti alla mecanica e i movimenti locali: Zugfestigkeit von Marmorsäulen, Seilen und Drähten (erster Tag), Betrachtungen zur Bruchfestigkeit von Balken (zweiter Tag)
- Edme Mariotte (1620–1684) – Lineare Verteilung der Faserdehnungen über Querschnitt, neutrale Faser in halber Höhe des doppeltsymmetrischen Balkenquerschnitts
- Robert Hooke (1635–1703) – Proportionalität zwischen Dehnung und Spannung (Hookesches Gesetz)
- Isaac Newton (1643–1727) – Gleichgewicht der Kräfte, Infinitesimalrechnung
- Gottfried Wilhelm Leibniz (1646–1716) – Infinitesimalrechnung, Widerstandsmoment[12]
- Jakob I Bernoulli (1655–1705) – Annahmen, die die Theorie vereinfachen: ebene und zur Balkenachse senkrechte Querschnittsfläche ist auch nach der Biegung eben und zur Balkenachse senkrecht
- Leonhard Euler (1707–1783) – erster Versuch zur Behandlung eines statisch unbestimmten Systems (vierbeiniger Tisch), Untersuchung des Knickens von Stäben (Theorie zweiter Ordnung)
- Charles Augustin de Coulomb (1736–1806) – erste durch die Infinitesimalrechnung zusammenhängende Darstellung der Balken-, Gewölbe- und Erddrucktheorie; Baustatik wird „wissenschaftlicher Gegenstand“
- Johann Albert Eytelwein (1764–1848) – Lösung statisch unbestimmter Systeme: Durchlaufträger
- Claude Louis Marie Henri Navier (1785–1836) – seine Arbeiten stellen die „Konstituierungsphase der Baustatik“ dar; er führt in seiner Technischen Biegetheorie die mathematisch-mechanische Analyse der elastischen Linie (Bernoulli, Euler) und die vornehmlich ingenieurmäßig orientierte Balkenstatik zusammen;
- Georg Rebhann (1824–1892) – gab 1856 Formeln für den Biegespannungsnachweis von einfachsymmetrischen Querschnitten an.
Literatur
- D. Gross, W. Hauger, J. Schröder, W. A. Wall: Technische Mechanik. Band 1–3, Springer, Berlin 2006 / 2007, DNB 550703683.
- István Szabó: Einführung in die Technische Mechanik. Springer, Berlin 2001, ISBN 3-540-67653-8.
- Peter Gummert, Karl-August Reckling: Mechanik. Vieweg, Braunschweig 1994, ISBN 3-528-28904-X.
- Karl-Eugen Kurrer: Geschichte der Baustatik. Auf der Suche nach dem Gleichgewicht, Ernst und Sohn, Berlin 2016, S. 88f., S. 395–412 und S. 452–455, ISBN 978-3-433-03134-6.
Einzelnachweise
- Fritz Stüssi: Baustatik I. 4. Auflage. 1971, ISBN 3-7643-0374-3, ab S. 173
- Pichler, Bernhard. Eberhardsteiner, Josef: Baustatik VO - LVA-Nr 202.065. Wien 2016, ISBN 978-3-903024-17-5, 2.7.1 Queranteile und 10.2 Ausgewählte Lastglieder für die Queranteile (TU Verlag [abgerufen am 10. Dezember 2016]). TU Verlag (Memento des Originals vom 13. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Oliver Romberg, Nikolaus Hinrichs: Keine Panik vor Mechanik! – Erfolg und Spaß im klassischen „Loser-Fach“ des Ingenieurstudiums. In: Studieren ohne Panik. 8., überarbeitete Auflage. Band 4. Vieweg+Teubner Verlag, 2011, ISBN 978-3-8348-1489-0 (349 S., springer.com [PDF] Erstausgabe: 1999).
- B. Kauschinger, St. Ihlenfeldt: 6. Kinematiken. (Nicht mehr online verfügbar.) Archiviert vom Original am 27. Dezember 2016; abgerufen am 27. Dezember 2016.
- Jürgen Fröschl, Florian Achatz, Steffen Rödling, Matthias Decker: Innovatives Bauteilprüfkonzept für Kurbelwellen. In: MTZ-Motortechnische Zeitschrift. Band 71, Nr. 9. Springer, 2010, S. 614–619 (springer.com).
- Herbert Mang, G Hofstetter: Festigkeitslehre. Hrsg.: Springer Verlag. (3. Auflage). Wien / New York 2008, ISBN 978-3-211-72453-8, 6.4 „Normalspannungen“, S. 156 (487 S., springer.com).
- siehe Hauptartikel: Biegelinie
- Es ist mit Heaviside-Funktionen möglich über den ganzen Balken zu integrieren
- Aufgrund von Symmetrie der Biegelinie folgt, die Antimetrie der Verdrehunglinie somit folgt ist, da keine eingeprägte Winkeländerung (an diesem Punkt) vorliegt, ist der Winkel stetig und somit der linkswertige Grenzwert gleich dem rechtswertigen Grenzwert , aus diesen Beiden Formeln folgt und aus dieser Gleichung folgt, dass ist
- Bernhard Pichler: 202.068 Baustatik 2. WS2013 Auflage. Wien 2013, VO_06_ThIIO_Uebertragungsbeziehungen (Onlineplattform der TU Wien).
- Pichler, Bernhard. Eberhardsteiner, Josef: Baustatik VO LVA-Nr 202.065. Hrsg.: TU Verlag. SS2016 Auflage. TU Verlag, Wien 2016, ISBN 978-3-903024-17-5, Lineare Stabtheorie ebener Stabtragwerke (520 Seiten, Grafisches Zentrum an der Technischen Universität Wien [abgerufen am 12. Januar 2017]). Grafisches Zentrum an der Technischen Universität Wien (Memento des Originals vom 13. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- IFBS: 8.3 Von Galileos Biegetheorie zur Sandwichtheorie siehe: Die großen Mathematiker greifen ein (Memento vom 15. März 2016 im Internet Archive)




