Schnittreaktion
Die Schnittreaktionen oder Schnittgrößen sind die beim gedanklichen Freischneiden (Schnittprinzip) auf den Schnittflächen wirkenden Kräfte (Schnittkräfte) und Momente (Schnittmomente). Aus ihnen lassen sich die Spannungen in der gedanklichen Schnittfläche des Festkörpers an dieser Stelle ermitteln. Die Spannungen sind ein Maß für die Beanspruchung des Materials und Grundlage von Festigkeits- und Verformungsuntersuchungen.
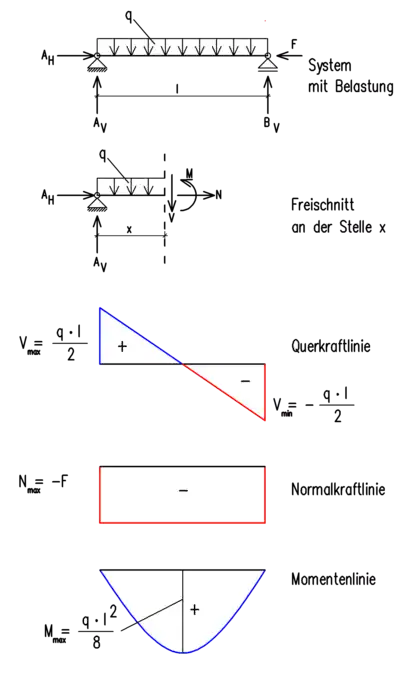
2. Teilbild: Schnittreaktionen an einer Schnittstelle (Normalkraft N, Querkraft V, Biegemoment M)
Drei Liniendiagramme: An den Zustandslinien lassen sich die Schnittreaktionen (Schnittgrößen) an einer beliebigen Stelle x ablesen.
Die Schnittreaktionen in einem festen stabförmigen Bauteil in einem ebenen (zweidimensionalen) Kraftsystem sind:
- die normal zur Schnittfläche, entlang der Stabachse wirkende Kraft (Normalkraft),
- die quer zur Schnittfläche, normal zur Stabachse wirkende Kraft (Querkraft),
- das Biegemoment.
Befindet sich das stabförmige Bauteil in einem räumlichen Kraftsystem, so wird die Querkraft mit zwei Komponenten in einem meist rechtwinkligen Koordinatensystem (x-Achse gleich Stabachse) dargestellt. Das Moment hat dann drei Komponenten, nämlich zwei Biegemomente und ein um die Stabachse drehendes Torsionsmoment.
Anwendung des Schnittprinzips an einem festen, stabförmigen Bauteil
Der zu untersuchende Stab wird an beliebiger Stelle gedanklich geschnitten. Die beiden Schnittteile können einzeln betrachtet werden. Die Schnittebene ist in der Regel eben und senkrecht zur Stabachse. Der Einfluss des weggeschnittenen Teils auf den zu untersuchenden Teil wird durch die an der Schnittstelle angetragenen Kräfte und Momente, die Schnittreaktionen, repräsentiert. Das zu untersuchende Teil bleibt mittels der Schnittgrößen im Kräfte-Gleichgewicht.
Alternativ kann ein beliebiges Teil herausgeschnitten werden, indem zwei Schnitte vorgesehen werden. Die Schnittgrößen sind dann an beiden Schnittflächen anzutragen.
Wenn man sich beim Schneiden einen Spalt zwischen den beiden Schnittflächen denkt, so können diese als zwei Ufer – ein linkes und ein rechtes – betrachtet werden. Die Schnittfläche am linken Ende eines Teils wird als rechtes oder negatives Schnittufer, am rechten Ende als linkes oder positives Schnittufer bezeichnet.
Die hier durch Pfeile dargestellten Schnittreaktionen (Kräfte und Momente) sind nach üblicher Vorzeichenkonvention positiv angetragen.
Die Bezugsfaser wird als gestrichelte Linie dargestellt.
Die Schnittfläche mit Normalenvektor in positiver x-Richtung ist das positive Schnittufer. Dabei zeigen alle Schnittgrößen in positive Richtung. Die Normalkraft N zeigt in positive x-Richtung, die Querkraft Q in positive z-Richtung und das Biegemoment besitzt einen positiven Drehsinn (Linksdrehung bzw. entgegen dem Uhrzeigersinn) um die y-Achse.
Zeigt der Normalenvektor der Schnittfläche in negative x-Richtung, so spricht man entsprechend vom negativen Schnittufer. In diesem Fall zeigen alle Schnittgrößen in negative Richtung, und das Biegemoment dreht sich um die y-Achse im negativen Drehsinn (entsprechend dem Uhrzeigersinn).
Schnittreaktionen in der Ebene
Die Lage des lokalen Stabachsenkoordinatensystems wird durch die gestrichelte Faser (Bezugsfaser) definiert. Sie legt Richtung und Ursprung der x-, y- und z-Achse sowie die Lage der y- und z-Achse fest. Nach üblicher Konvention gilt: Die z-Achse zeigt zur gestrichelten Seite hin.[1] Die x-Achse ist die Stabachse. Die y-Achse zeigt aus der Ebene heraus zum Betrachter. Damit ergibt sich ein kartesisches Rechtskoordinatensystem.
- Querkraft – Eine Kraft senkrecht zur x-Achse des Bauteils. Häufige Notationen sind V (vertikal), FQ, Q (quer), Fy/Fz (in y-/z-Richtung)
- Normalkraft oder Längskraft – Eine Kraft parallel zur x-Achse des Bauteils. Notationen sind N, FN (normal = senkrecht zum Querschnitt der Schnittstelle), FL (Längs)
- (Biege-)Moment – Das an der Schnittstelle wirkende Moment. Im ebenen Fall wird es einfach mit M bezeichnet.
Alle Schnittreaktionen sind Vektorgrößen. Das heißt, dass jede Kraft eine Richtung hat und jedes Moment entweder im oder gegen den Uhrzeigersinn dreht.
Ein Stab oder ein komplexeres Objekt kann auch in einem Gelenk freigeschnitten werden. Dabei gilt:
- Das Reaktions-Moment an einem „Momentengelenk“ ist Null.
- Die Reaktions-Querkraft an einem „Querkraftgelenk“ ist gleich der dort eingeprägten Kraft.
- Die Reaktions-Normalkraft an einem „Normalkraftgelenk“ ist gleich der dort eingeprägten Kraft.
Schnittreaktionen im Raum
Die Reaktions-Querkraft und das -Biegemoment erscheinen im kartesischen Koordinatensystem als je zwei Komponenten. Das Reaktions-Moment enthält eine dritte Komponente, nämlich eine um die x-Achse drehende (Torsionsmoment, Notationen sind Mx, MT oder T).
Zustandslinien
Verschiebt man die gedachte Schnittstelle entlang des Bauteiles, so ändern sich die Schnittreaktionen. Die in einem Diagramm dargestellten Schnittreaktionen als Funktion des Schnittstellen-Ortes (Koordinate x, s. Bild in der Einleitung) nennt man Zustandslinien, da die Schnittreaktionen dem an dieser Stelle bestehenden inneren Zustand (mechanische Spannungen) entsprechen. Die Stellen der stärksten Beanspruchung in einem Balken mit konstantem Querschnitt treten in den Zustandslinien deutlich hervor.
Einflusslinien
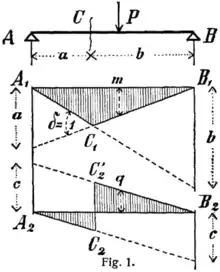
Eine Einflusslinie stellt im Unterschied zur Zustandslinie nicht eine Schnittreaktion in Abhängigkeit von der Schnittstelle (Koordinate x), sondern die Abhängigkeit einer Schnittreaktion an einem bestimmten Ort (Koordinate x0 in der Abbildung die Position der Schnittstelle C) vom veränderlichen Ort (Koordinate x in der Abbildung die Position der Kraft P) einer äußeren Last dar.
Einer ortsveränderlichen Last sind z. B. Brücken durch ein darüber rollendes Fahrzeug unterworfen. Es interessiert der Einfluss der variablen Stelle der Last auf die Beanspruchung der Brücke an einer bestimmten Stelle, die durch die Größe der Schnittreaktionen an einem dort gedachten Schnitt ausgedrückt wird.
Berechnen der Schnittreaktionen
Um Schnittreaktionen zu berechnen, gibt es mehrere Möglichkeiten. Bei allen müssen die Gleichgewichtsbedingungen eingehalten werden. Generell unterscheidet man:
Geschlossenes Krafteck
Man kann das Krafteck rechnerisch oder graphisch lösen.
Die Gleichgewichtsbedingungen liefern im Allgemeinen nur bei statisch bestimmten Systemen eindeutige Ergebnisse. Bei statisch unbestimmten Systemen gibt es im Allgemeinen zu viele Unbekannte, um sie ohne zusätzliche Gleichungen anzuwenden. In diesem Fall führen z. B. Kraft- oder Weggrößenverfahren zur Lösung. Die Schnittreaktionen (an statisch bestimmten Systemen) rechnet man normalerweise mithilfe der Gleichgewichtsbedingungen aus. Die Gleichgewichtsbedingungen für statische Systeme besagen, dass
- die Summe aller Kräfte gleich null ist und
- die Summe aller Momente (um einen beliebigen Punkt) gleich null ist .


Mit diesen Gleichgewichtsbedingungen werden Gleichungen erstellt, die es ermöglichen, die fehlenden Kräfte oder Momente auszurechnen. Durch eine intelligente Wahl der Schnitte (z. B. so, dass jeweils nur eine unbekannte Größe in einer Gleichung auftaucht) lässt sich oft der Rechenaufwand verringern, jedoch ist dies nicht immer möglich.
Die genauen Gleichungen sind im Folgenden aufgeführt.
Ebener Fall (2D)
Hier kann man 3 linear unabhängige Momenten-Gleichgewichtsbedingungen definieren, am einfachsten ist es im Allgemeinen zwei Punkte davon im Unendlichen zu definieren und somit erhält man zwei Kraftkomponenten-Gleichgewichtsbedingungen und eine Momenten-Gleichgewichtsbedingung:



Anmerkung: Der Index „A“ in der Momentegleichung deutet darauf, dass man hier die Summe der Momente um einen fiktiven Drehpunkt „A“ betrachtet.
Allgemeiner Fall (3D)
Hier ergeben sich z. B. drei Kraftkomponenten-Gleichgewichtsbedingungen und drei Momentenkomponenten-Gleichgewichtsbedingungen:




Die Punkte „A1“, „A2“, „A3“ dürfen auch identisch sein, sondern liefern auch neue linear unabhängige Gleichungen, da sie die Drehmomente um eine andere Achse betrachten. Alternativ kann z. B. man auch sechs Momenten-Gleichgewichtsbedingungen aufstellen, hierbei muss man jedoch unterschiedliche Punkte wählen.
Schnittgrößendifferentialgleichungen
Mit diesem Ansatz werden Differentialgleichungen, die die Gleichgewichtsbedingungen erfüllen, für die gesuchten Schnittgrößen aufgestellt und dann mit zum System passenden Randbedingungen (beispielsweise: Keine Momentübertragung an einem Lager an Position x=0) gelöst.
In der schubweichen Balkentheorie II. Ordnung gibt es unter den Bernoullischen Annahmen folgende Differentialgleichungen für die Queranteile:




mit
- der Laufkoordinate x entlang der Balkenachse
- dem Elastizitätsmodul E
- dem Schubmodul G (Term tritt in der schubstarren Theorie nicht in den Differentialgleichungen auf)
- dem Flächenträgheitsmoment I(x)
- R(x) der Transversalkraft (in der Theorie I. Ordnung gilt R(x)=V(x))
- V(x) der Querkraft
- NII(x) die Normalkraft nach Theorie Theorie II. Ordnung (in der Theorie I. Ordnung tritt dieser Term in der Differenzialgleichung nicht auf)
- q(x) der Gleichlast (Querbelastung pro Längeneinheit[3])
- M(x) dem Biegemoment
- m(x) dem Steckemoment (Biegebelastung pro Längeneinheit[3])
- φ(x) der Verdrehung
- κe(x) der eingeprägten Krümmung
- w(x) der Durchbiegung zufolge Belastung
- wv(x) der Durchbiegung zufolge Vorverformung
- der Schubfläche (Term tritt in der schubstarren Theorie nicht auf).

Die ersten beiden Differenzialgleichungen folgen allein aus den Gleichgewichtsbedingungen, erste folgt aus Summe der Vertikalkräfte ist null und zweitere aus der Erkenntnis, dass die Summe der Momente Null sein muss. Die letzten beiden Differenzialgleichungen sind geometrische Differentialbeziehungen, das die erste Ableitung der Biegelinie die Neigung ist und die zweite Ableitung die Krümmung ist, hinzukommend werden hier noch zwei Materialgleichungen eingesetzt:
- und .


Siehe auch
- Schnittprinzip bei Fachwerken: Ritterschnitt sowie Rundschnitt
Literatur
- Karl-Eugen Kurrer: Einflusslinien. In: Geschichte der Baustatik. Auf der Suche nach dem Gleichgewicht. 2., stark erweiterte Auflage. Ernst & Sohn, Berlin 2016, ISBN 978-3-433-03134-6, S. 97–102.
Weblinks
Einzelnachweise
- D. Gross, W. Hauger, J. Schröder, W. Wall: Technische Mechanik 1: Statik. Band 1. Springer Verlag, Berlin 2011, ISBN 978-3-642-13805-8, S. 171 ff.
- Bernhard Pichler: 202.068 Baustatik 2. WS2013 Auflage. Wien 2013, VO_06_ThIIO_Uebertragungsbeziehungen (Onlineplattform der TU Wien).
- Bernhard Pichler, Josef Eberhardsteiner: Baustatik VO – LVA-Nr. 202.065. Hrsg.: E202 Institut für Mechanik der Werkstoffe und Strukturen – Fakultät Bauingenieurwesen, TU Wien. SS2016 Auflage. TU Verlag, Wien 2016, ISBN 978-3-903024-17-5, Lineare Stabtheorie ebener Stabtragwerke (520 S., Grafisches Zentrum an der Technischen Universität Wien – Erstausgabe: 2012). Grafisches Zentrum an der Technischen Universität Wien (Memento des Originals vom 13. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.