Vektorielle Größe
Eine vektorielle Größe oder gerichtete Größe ist eine physikalische Größe, die – im Gegensatz zu den skalaren Größen – einen Richtungscharakter hat. Typische vektorielle Größen sind die kinematischen Größen Geschwindigkeit und Beschleunigung, die dynamischen Größen Impuls und Kraft bzw. Drehimpuls und Drehmoment sowie die Feldstärken der elektrischen und magnetischen Felder der Elektrodynamik. Vektorielle Größen werden sowohl zeichnerisch als auch rechnerisch wie geometrische Vektoren behandelt, wobei einige Besonderheiten zu beachten sind.
Darstellung
Vektorielle Größen werden meist mit einem Pfeil über dem Symbol () oder durch Fettdruck () kenntlich gemacht. Das entsprechende Größensymbol ohne Kennzeichnung steht für den Betrag der Größe: bzw. . In Zeichnungen wird die vektorielle Größe durch einen Pfeil dargestellt, dessen Länge steht für den Betrag der Größe.




Mathematische Eigenschaften
Im Gegensatz zu geometrischen Vektoren steht eine vektorielle Größe nicht für eine räumliche Verschiebung. So sind z. B. Kräfte keine Elemente des Ortsraums, sondern eines eigenen Vektorraums, auch wenn sie zur Veranschaulichung in räumliche Skizzen eingetragen werden. In anderen Worten: Obwohl sie als gerichtete Strecken dargestellt werden, haben sie in aller Regel nicht die Dimension eines Weges.
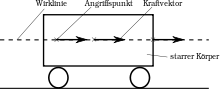
Der Vektorraum , in dem eine vektorielle Größe lebt, ist im Allgemeinen einem Punkt im Raum zugeordnet. Dies lässt sich durch einen Index ausdrücken. Eine vektorielle Größe an einem anderen Punkt ist nicht Element des Vektorraums , sondern lebt in einem eigenen Vektorraum . Zwei vektorielle Größen lassen sich nur dann addieren, wenn sie Element desselben Vektorraums sind. Dies geschieht durch eine Parallelverschiebung. Ein Kraftvektor lässt sich beispielsweise bei starren Körpern entlang seiner Wirkungslinie verschieben (siehe Abbildung).






Wenn es eine Funktion gibt, die jedem Punkt im Raum eine vektorielle Größe zuordnet, so bezeichnet man die Funktion als Vektorfeld.
Viele physikalische Probleme lassen sich im dreidimensionalen euklidischen Raum beschreiben. Eine solche vektorielle Größe lässt sich daher durch einen Vektor aus einem Vektorraum mit Dimension 3 beschreiben. In der Relativitätstheorie wird zur Angabe einer Richtung in der Raumzeit zusätzlich eine Richtung in der Zeit festgelegt, daher werden hier meist Vierervektoren aus einem vierdimensionalen Vektorraum verwendet.
Je nach Verhalten unter Raumspiegelung unterscheidet man axiale und polare Vektoren. Eine vektorielle Größe, die durch einen axialen Vektor gegeben ist, behält ihre Richtung bei, während eine vektorielle Größe, die durch einen polaren Vektor gegeben ist, ihre Richtung umkehrt. Das Verhalten unter einer unten beschriebenen gewöhnlichen Koordinatentransformation ist bei beiden gleich.
Koordinaten und Komponenten
Eine vektorielle Größe lässt sich durch ihre Koordinaten beschreiben, d. h. durch ein Tupel von Zahlen, das die Orientierung der Größe im Raum kennzeichnet. Häufig werden kartesische Koordinaten verwendet. Um den Richtungscharakter einer vektoriellen Größe wiederzugeben, eignet sich deshalb die Darstellung als Spaltenvektor:

Statt mit 1, 2 und 3 werden die Koordinatenachsen oft mit , und bezeichnet. Die -Achse ist üblicherweise die vertikale Achse, während sich die -Ebene in der Horizontalen erstreckt. Manchmal sind andere Koordinatensysteme wie Kugelkoordinaten sinnvoller. Dabei wird einerseits der Betrag der Größe angegeben und andererseits die Richtung durch die beiden Winkel und .






Daneben wird auch die Komponentenschreibweise verwendet. Dabei sind die mit die Koordinaten des Vektors bezüglich einer zuvor festgelegten Basis . Die Größe kann dann als Summe ihrer Komponenten geschrieben werden:





Für eine Orthonormalbasis erhält man umgekehrt die Koordinaten durch das Skalarprodukt
- .

Die Koordinaten einer vektoriellen Größe sind je nach Wahl der Basisvektoren unterschiedlich. Die Koordinaten im ungestrichenen Koordinatensystem hängen mit den Koordinaten im gestrichenen Koordinatensystem über die Relation


zusammen. Üblicherweise wird eine Koordinatenbasis verwendet, bei der die Basisvektoren „in Richtung der Koordinaten“ zeigen. Mit hoch- und tiefgestellten Indizes lassen sich kovariante und kontravariante Vektoren unterscheiden. Das Transformationsverhalten einer vektoriellen Größe unter einer Koordinatentransformation entspricht einem Tensor der Stufe 1, ein Skalar entspricht einem Tensor der Stufe 0.[1] Vektorielle Größen lassen sich daher allgemein über ihr Transformationsverhalten unter Koordinatentransformationen definieren. Die Transformation der Basisvektoren ist durch



definiert. Beispielsweise ist der Basisvektor bei einer Transformation der Koordinaten nach durch die partiellen Ableitungen der Koordinatenfunktionen , und gegeben:




Als Beispiel für die drei Darstellungsarten soll die Gewichtskraft dienen, die den Betrag hat, wobei die Masse des Körpers und die Schwerebeschleunigung ist.



- In kartesischen Koordinaten: (im homogenen Schwerefeld).
- In Kugelkoordinaten: (im realen Schwerefeld der Erde, wobei der Erdmittelpunkt den Koordinatenursprung bildet).
- In Komponentenschreibweise: (im homogenen Schwerefeld). Hier wurde das Kronecker-Delta verwendet, das in diesem Fall für alle verschwindet.




Zwangsbedingungen können die Zahl der erforderlichen Koordinaten reduzieren. Ist ein physikalisches Problem auf eine Ebene beschränkt, reicht ein zweidimensionales Koordinatensystem aus. Im eindimensionalen Fall ist der Richtungscharakter der vektoriellen Größe nur noch durch ihr Vorzeichen erkennbar.
Weblinks
- Vector and Tensor Algebra (including Column and Matrix Notation). – Übersicht über Rechenregeln und Notationen für Vektoren (PDF, 266 kB, englisch).
Einzelnachweise
- Rana & Joag: Classical Mechanics. Tata McGraw-Hill Education, 2001, ISBN 0-07-460315-9, S. 559 (eingeschränkte Vorschau in der Google-Buchsuche).