Geschichte der Regelungstechnik
Die Geschichte der Regelungstechnik bzw. die Beschäftigung des Menschen mit der Regelungstechnik beginnt zwischen dem 3. Jahrhundert v. Chr. und dem 1. Jahrhundert n. Chr. im antiken Griechenland. Das einer Regelung zugrunde liegende Rückkopplungsprinzip ist keine Erfindung des Menschen, sondern ein seit je stattfindendes Naturphänomen. Die moderne Regelungstechnik begann zur Zeit der industriellen Revolution unter Verwendung mechanischer Bauteile. Ihr größter Fortschritt wurde durch die Entwicklung der Elektronik und schließlich durch die elektronische Rechentechnik ermöglicht.
Natürliche Regelungsvorgänge
Regelungsvorgänge in der lebenden Natur
- Beim Menschen und bei Tieren: geregelte Körpertemperatur, geregelter Blutdruck und geregelter Blutzucker; Pupillenöffnung regelt Lichteinfall; aufrechter Gang bei Zweibeinern mit Gleichgewichtsregelung.
- Das Hase-Fuchs-Population-Modell (siehe Räuber-Beute-Beziehung und Lotka-Volterra-Regeln) als Beispiel für das biologische Gleichgewicht regelt eine Führungsgröße als Funktion der unterschiedlichen Nahrungsangebote auf eine annähernd feste Hase-Fuchs-Verhältniszahl.
- Störgrößen: Klima, Vegetation, veränderte Geländeeigenschaften, Krankheiten, Mensch.
Beispiel: Erdklima
- Erdgeschichtlich gesehen, ist die globale Luft-Durchschnittstemperatur in Erdbodennähe (Meereshöhe) seit vielen Millionen Jahren relativ konstant. Das Regelungsprinzip für den schmalen Temperaturbereich als Klima-Voraussetzung des höher entwickelten biologischen Lebens kommt in der Natur zur Anwendung, wenn z. B. durch eine steigende Lufttemperatur die globale Wasser-Oberflächentemperatur der Weltmeere steigt und durch Wasserdampf mit Wolkenbildung die Sonneneinstrahlung reduziert. Dabei greifen zahlreiche langfristige und kurzfristige Störgrößen zur Klimaveränderung ein:
- langfristige Störgrößen:
- Abstand Erde-Mond vergrößert sich (Gezeitenänderung), Meeresströme ändern ihre Richtung, Erdkontinentalplatten wandern (Kontinentaldrift), Erdmagnet-Pole wandern.
- Erdgeschichtlich kurzfristige Störgrößen:
- Starker Vulkanismus führt zur Abkühlung, große Meteoriteneinschläge führen zu Abkühlung oder im Extremfall zur Erdoberflächenverbrennung, Perioden geringer Sonnenaktivitäten (Sonnenflecken) bewirken eine leichte Abkühlungen (Kleine Eiszeit umstritten!).
- Biologisch: Algenwachstum und Eisendüngung (als Kohlenstoffbindung zur Kohlendioxid-Reduzierung: umstritten!), Abholzung der Wälder, Verbrennen fossiler Brennstoffe und erhöhter Methanausstoß (siehe Alkane) führen zum Treibhauseffekt.
Beispiel: Biologische Systeme und Geologie
- Die Gaia-Hypothese wurde von der Mikrobiologin Lynn Margulis und dem Chemiker, Biophysiker und Mediziner James Lovelock Mitte der 1960er-Jahre entwickelt. Sie besagt, dass die Erde und ihre gesamte Biosphäre wie ein Lebewesen betrachtet werden kann.
Begriff Kybernetik
Die grundlegenden Analogien zwischen Regelungsvorgängen in der belebten Natur und in technischen Systemen wurden seit den 1940er Jahren näher beschrieben. In Deutschland erfolgte dies durch die „Allgemeine Regelungskunde“ von Hermann Schmidt, der 1944 auf den ersten Lehrstuhl für Regelungstechnik an der TH Berlin-Charlottenburg berufen wurde. In den USA war es Norbert Wiener, der sich während des Zweiten Weltkrieges mit Regelungen für militärische Anwendungen befasste. Beide untersuchten den Rückkoppelungsmechanismus in technischen und biologischen Systemen. Norbert Wiener wurde 1947 zum Schöpfer des allgemein bekannten Begriffs Kybernetik für die Wissenschaft der Steuerung und Regelung von Maschinen und deren Analogie zur Handlungsweise von lebenden Organismen (aufgrund der Rückkopplung durch Sinnesorgane) und sozialen Organisationen (aufgrund der Rückkopplung durch Kommunikation und Beobachtung). Hermann Schmidt benutzte später ebenfalls den Begriff Kybernetik.
Historische Beispiele technischer Regelungen
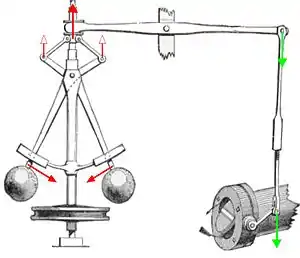
rechts: Stellglied (Drosselklappe in der Dampfzuleitung)
links: Messglied und Regler als Einheit (Fliehkraftpendel auf einer Drehzahl-Messwelle)
Mitte: Gegenkopplung (waagerechter Hebel und senkrechte Stange), kleinere Drehzahl vergrößert die Drosselöffnung
Sollwert-Veränderung durch Längenänderung der senkrechten Stange zur Drosselklappe
Das Prinzip der Regelung durch Rückkopplung wurde schon von Mechanikern in der Antike angewendet. Nachgewiesen sind Einrichtungen zur Regelung von Flüssigkeits-Niveaus, die Ktesibios aus Alexandria und sein Schüler Philon von Byzanz erfanden. Ktesibios regelte den Wasserstand in einem Behälter, aus dem eine Einlaufwasseruhr mit Wasser versorgt wurde.[1] Der Wasserzufluss von konstanter Höhe herab ist gleichmäßig und erhöht die Genauigkeit der Uhr. Von Phylon ist eine Öllampe bekannt geworden, in der das Öl automatisch auf gleichem Niveau gehalten wurde. Das konstante Ölniveau verbesserte den gleichmäßigen Brand der Flamme. Der Aufwand war aber klein, obwohl es sich um eine vollwertige Regelung handelte.
Danach wurde das Prinzip der Regelung erst wieder in der Neuzeit aufgegriffen. Im 17. Jahrhundert entstand die erste Temperaturregelung, die der Niederländer Cornelis Jacobszoon Drebbel in einem Brutkasten für Hühnereier entwarf.[2] 1681 erfand der Franzose Denis Papin eine einfache Druckregelung für einen Dampfkochtopf durch Einbau eines Überdruckventils.
Der erste in Serie hergestellte Regler war der Fliehkraftregler, dessen Erfindung James Watt fälschlicherweise zugeschrieben wird (siehe Abbildung). Der Fliehkraftregler wurde vorher schon an Windmühlen verwendet. Watt hat die 1769 von Thomas Newcomen erfundene Dampfmaschine im Jahr 1786 mit einem solchen Regler ausgerüstet.[3]
Für die aufkommende Dampfmaschinentechnik kam die aus der Antike bekannte Wasserstandsregelung mit Schwimmer durch den Russen Ivan Polzunov zur Anwendung. Der Schwimmer beeinflusste über ein Gestänge das Wasser-Einlassventil des Dampfkessels.
Der Radsatz eines Schienenfahrzeugs ist so konstruiert, dass er aufgrund der konischen Laufflächen der Räder selbsttätig in die Gleismitte zurücklenkt. Falls der Radsatz, z. B. durch seitliche Windkräfte oder ungerade verlegtem Gleis, aus der Gleismitte verschoben wird, erhöht sich der Rollradius auf der einen Seite und verringert sich auf der anderen Seite. Aufgrund der starren Koppelung der beiden Räder lenkt der Radsatz daher mit einem gedämpften Sinuslauf in die Gleismitte zurück. Entgegen landläufiger Meinung ist der Spurkranz nicht für die Spurhaltung erforderlich. Bei ungenügender Auslegung des mechanisch rückgekoppelten Systems neigt der Radsatz bei hohen Geschwindigkeiten zu instabilen Schwingungen.
Die Einspritzpumpe eines Dieselmotors enthält einen Regler um die Menge des pro Umdrehung zugeführten Kraftstoffs so zu dosieren, dass die Drehzahl des Motors entsprechend der Stellung des Gaspedals konstant bleibt. Ohne diese Regelung würde er zur Instabilität und Selbstzerstörung neigen, da mit höherer Drehzahl immer mehr Kraftstoff zugeführt würde.
Die Technik der selbsttätigen Regelung blieb lange Zeit auf die Anwendung in Kraftmaschinen beschränkt. Eine erste Ausweitung erstreckte sich auf die Regelung von Größen in verfahrenstechnischen Prozessen, vor allem von Temperaturen, Drücken und Massenströmen. Nach dem Zweiten Weltkrieg entstanden die vereinheitlichten, vielfach einstellbaren elektrischen, hydraulischen und pneumatischen PID-Regler.
In der jüngsten Vergangenheit hat sich die Anwendung der Regelungstechnik auf alle Gebiete der Technik ausgedehnt. Anstöße gaben die Ausweitung der Automatisierung, zum Beispiel mit Hilfe von Robotern, und die neue Weltraumtechnik. Die Regelungstechnik ist inzwischen eine Symbiose mit der Informationstechnik (sowohl Hard- als auch Software) eingegangen. Die Verkehrsregelung zur Vermeidung von Staus ist ein Beispiel für ein sehr komplexes System, wenn die Grünphasen der Kreuzungen entsprechend dem tatsächlichen Verkehrsaufkommen als Grüne Welle so aufeinander abgestimmt werden, dass sich ein möglichst konstanter Verkehrsfluss ergibt.
Chronologie der Entwicklung der Regelungstechnik
| Jahr | Forscher Mathematiker | Historische Ereignisse |
|---|---|---|
| 300 v. C. | Ktesibios aus Alexandria Philon von Byzanz | Wasserkanäle, Kombinierte Saug- und Druckpumpe, Wasserorgel, Wasserstandsregler |
| 200 v. C. | Vermutlich Archimedes | Mechanismus von Antikythera: Rekonstruktionsergebnis (2012): Mit Drehknopf oder Kurbel einstellbarer auf Zahnradmechanismus basierender kalendarisch-astronomischer Simulator mit 7 Zeigern zur Darstellung der Bewegung der Himmelskörper (Sonne bis Saturn). |
| 1. Jahr- hundert | Heron von Alexandria | Heronsbrunnen Füllstandsregelung |
| ca. 1770 | Leonhard Euler | Differential- und Integralrechnung u. a. mit Differenzengleichungen, Wegbereiter der numerischen Berechnung, Eulersches Polygonzugverfahren, Euler-Gleichungen. |
| ca. 1780 | Pierre-Simon Laplace | Systembeschreibungen mit Hilfe der Laplace-Transformation, Laplace-Gleichung, Laplace-Operator. |
| 1782 | James Watt | Beginn der Industriellen Revolution, Konstruktion einer Dampfmaschine |
| 1788 | James Watt | Fliehkraftregler von Windmühlen zur Anwendung auf Dampfmaschinen übertragen |
| 1868 | James Clerk Maxwell | Systembeschreibung verschiedener Regler durch Differentialgleichungen |
| 1895 | Adolf Hurwitz | Stabilitätskriterium in Abhängigkeit vom Nennerpolynom der Übertragungsfunktion, Hurwitzpolynom |
| 1922 | Nicolas Minorsky | Schiffsteuerung mit PID-Regelung bei der US-Navy |
| 1932 | Harry Nyquist | Stabilitätskriterium basierend auf der Ortskurve des Frequenzgangs |
| 1938 | Hendrik Wade Bode | Frequenzganganalyse (Bodediagramm) |
| 1942 | Ziegler / Nichols | Einstellregeln für P-, PI- und PID-Regler |
| 1942 | Norbert Wiener | Modelle der Prädiktion (Vorhersage), Modelle der Flugbahn von Flugzeugen; Automatische Zielsteuerung. |
| 1944 | Hermann Schmidt | Erster Lehrstuhl für Regelungstechnik in Deutschland an der TH Berlin-Charlottenburg |
| 1947 | Norbert Wiener | Schöpfer des Begriffs Kybernetik. Unter anderem wird hier der Rückkoppelungsmechanismus in technischen und biologischen Systemen untersucht. Ein weiterer grundlegender Begriff hierzu ist Kommunikationstheorie. |
| 1948 | Walter Richard Evans | Wurzelortskurve |
| 1955 | Heinrich Kindler | Erstes Institut für Regelungstechnik im deutschsprachigen Raum an der TH Dresden |
| 1957 | Winfried Oppelt | Erster Lehrstuhl für Regelungstechnik in der Bundesrepublik Deutschland an der TH Darmstadt |
| 1960 | Rudolf Kálmán | Kalman-Filter, Zustandsraumdarstellung |
| 1962 | Richard Bellman | Optimalitätsprinzip von Bellman, Dynamische Programmierung, Bellman-Algorithmus |
| 1965 | Lotfi Zadeh | Fuzzy-Set-Theorie als unscharfe Mengenlehre entwickelt (University of California, Berkeley). In Japan als Fuzzy-Logik für Fuzzy-Regler (Controller) seit 1980er Jahren in industriellen Prozessen eingesetzt, in Europa seit den 1990er Jahren. |
| 1969 | Richard E. Morley | Erfindung: Speicherprogrammierbare Steuerung (SPS) beim US-amerikanischen Unternehmen Modicon (Typ Modicon 084). Auf Basis des Mikroprozessors (erfunden 1971 in den USA) entwickelte sich die SPS schrittweise zum universellen Automatisierungsmittel für Steuerung, Regelung und Messwertverarbeitung. |
| 1974 | Günther Schmidt | Erster europäischer Universalregler auf Mikroprozessor-Basis (Digitalregler) an der TU München (gemeinsam mit H. Birk) |
| 1976 | Aérospatiale | Erstes analoges Fly-by-Wire Steuerungssystem im Verkehrsflugzeug Concorde zur Sicherstellung der Flugstabilität in allen Geschwindigkeiten |
| 1987 | Airbus | Erstes digitales Fly-by-Wire Steuerungssystem im Verkehrsflugzeug Airbus A320 |
Einzelnachweise
- Wasseruhr des Ktesibios (Rekonstruktion)
- Bernhard J. Dotzler: Papiermaschinen. Versuch über Communication & Control in Literatur und Technik. Akad.-Verl, Berlin 1996, ISBN 3-05-002913-7, S. 203–218.
- Werner Kriesel, Hans Rohr, Andreas Koch: Geschichte und Zukunft der Mess- und Automatisierungstechnik. VDI-Verlag, Düsseldorf 1995, ISBN 3-18-150047-X, S. 5 bis 6.