Fahrphysik (Auto)
Die Fahrphysik von Kraftfahrzeugen befasst sich mit den Auswirkungen physikalischer Gesetze auf das Fahrverhalten und die Wahrnehmungen der Fahrzeuginsassen. Die Kenntnis der physikalischen Grenzen ist insbesondere im Motorsport und beim Führen von Nutzfahrzeugen von großer Bedeutung.
Kräfte zwischen Reifen und Fahrbahn
Bei Kraftfahrzeugen wird der Kontakt zwischen Fahrzeug und Fahrbahn nur durch die Reifenaufstandsflächen, jede etwa handtellergroß, vermittelt. Die Kraftentstehung in diesen Kontaktflächen ist somit für die Fahrdynamik von besonderem Interesse.
Die einfachste Modellvorstellung ist der Kammsche Kreis. Dieser besagt, dass die Gesamtkraft aus Seitenkraft und Umfangskraft einen Maximalwert nicht übersteigen kann.
Die Maximalkraft hängt vom maximalen Kraftschlussbeiwert zwischen Reifen und Straße sowie der Radlast ab. Der Straßenzustand (trocken, feucht, nass, Schnee, Eis, Schotter, …) hat den größten Einfluss auf den Kraftschlussbeiwert.
Bei normaler Fahrt liegt der Krafteinsatz aller Räder weit innerhalb des Kammschen Kreises. Wird jedoch ein Rad während einer Kurvenfahrt im Grenzbereich zusätzlich durch starkes Bremsen verzögert, so kann es weniger Seitenführungskraft aufbringen. An der Vorderachse führt dies zum Untersteuern, an der Hinterachse zum Übersteuern. Wenn ein Rad blockieren würde, so würde es unabhängig vom Lenkeinschlag weiter in die momentane Bewegungsrichtung des Radaufstandspunkts rutschen; die resultierende („bremsende“) Kraft ist dann genau entgegengerichtet. Die Richtung der Gesamtkraft würde sich dann durch einen Lenkeinschlag nicht ändern. Ein Fahrzeug ist mit blockierten Rädern somit nicht mehr lenkbar, weshalb für heutige Pkw ein Antiblockiersystem vorgeschrieben ist.
Durchdrehende Räder infolge von Antriebsmomenten bei Kurvenfahrt führen zu ähnlichen Effekten (Untersteuern bei frontgetrieben Fahrzeugen, Übersteuern bei Hinterachsangetriebenen Fahrzeugen). Moderne Fahrzeuge haben daher Regelsysteme (Fahrdynamikregelung, ESP), die großen Schlupf beim Bremsen (ABS) und Antreiben (Antriebsschlupfregelung, ASR) sowie in Querrichtung verhindern. Fahrdynamisch kritische Situationen werden so weit wie möglich vermieden.[1]
Im Motorsport wird dagegen Schlupf an der Hinterachse bewusst eingesetzt, um das Fahrzeug zum Driften zu bringen.
Da der Laufstreifen des Reifens elastisch deformierbar ist, können Seitenkräfte nur entstehen, wenn ein Schräglaufwinkel vorhanden ist. Diese Gesetzmäßigkeit hat weitreichende Konsequenzen für das Fahrverhalten, insbesondere bei hohen Fahrgeschwindigkeiten (siehe Einspurmodell). In Umfangsrichtung kann entsprechend auch nur eine Kraft wirken, wenn Schlupf vorhanden ist.
Trägheitsprinzip
Das physikalische Prinzip, welches man als Fahrer oder Mitfahrer von Fahrzeugen am deutlichsten erfährt, ist das von Isaac Newton formulierte Prinzip der Trägheit. Es besagt, dass ein Körper im Zustand der Ruhe oder der gleichförmigen Bewegung verharrt, wenn er nicht durch einwirkende Kräfte gezwungen wird, dies zu ändern.
Auf das Fahrzeug wirken bei normaler Fahrt äußere Kräfte ein. Von besonderer Bedeutung sind dabei die Reifenkräfte,[2] da ohne diese eine kontrollierte Bewegung des Fahrzeugs nicht möglich ist. Durch diese äußeren Kräfte können sowohl das Fahrzeug als auch die Insassen eine Beschleunigung erfahren. Die Trägheitskraft ist der Beschleunigung entgegengerichtet. Bei Kurvenfahrt wird sie von den Insassen als Zentrifugalkraft, beim Bremsen als Kraft nach vorn wahrgenommen.
Bei einer Kollision können auch große Kräfte auftreten. Im Fall eines Frontalaufpralls würden die Insassen ihre Bewegung in Richtung Windschutzscheibe fortsetzen, wenn nicht Haltekräfte durch Rückhaltesysteme wie Sicherheitsgurte dies verhindern würden.
Kurvenfahrt
Das Befahren einer Kurve mit dem Krümmungsradius r und der Fahrgeschwindigkeit v erfordert die Querbeschleunigung . Da das Seitenkraftpotential der Reifen begrenzt ist, ergibt sich die maximal mögliche Geschwindigkeit zu:

- .

Wird diese Kurvengrenzgeschwindigkeit überschritten, so kann das Fahrzeug dem Radius nicht mehr folgen und verlässt die Fahrspur. Bei glatter Fahrbahn muss eine Kurve daher langsamer angefahren werden, als bei griffiger Fahrbahn.
Typische maximale Querbeschleunigungen von PKW betragen auf trockener Fahrbahn zwischen 8 m/s2 und 10 m/s2. Im Rennsport werden hier wesentlich höhere Werte erreicht, weil die Karosserie und Flügel an Front und Heck Abtrieb erzeugen, der die Radlast vergrößert. Auf Schnee vermindern sich die Werte auf etwa 3 m/s2 oder darunter. Auf nassem Eis können sich die Werte bis auf 1 m/s2 reduzieren. Auf dem Mond ist zwar nicht mit Schnee und Eis zu rechnen. Dennoch müsste man sich dort auf Grund der sehr geringen Gravitation auf ständig „rutschige“ Verhältnisse einstellen. Bei der Konstruktion von Rovern müssen deshalb statt Reibschluss auch andere Techniken zur Fortbewegung verwendet werden.
Aus Gründen der Fahrsicherheit sind moderne Fahrzeuge so ausgelegt, dass bei stationärer Kurvenfahrt die Vorderachse zuerst die Kraftschlussgrenze (Rutschgrenze) erreicht. Das Fahrzeug untersteuert. Bei Fahrzeugen mit Heckmotor trat früher der umgekehrte Fall auf. Diese Fahrzeuge waren als „Heckschleudern“ berüchtigt. Bei der Abstimmung wird der Effekt ausgenutzt, dass der maximale Kraftschlussbeiwert von Reifen mit zunehmender Radlast sinkt. Durch Stabilisatoren wird die Radlastdifferenz der Vorderachse größer als die der Hinterachse gewählt. Bei Fahrzeugen mit Heckantrieb reicht dies häufig nicht aus, so dass Vorderachse und Hinterachse mit Reifen unterschiedlicher Breite versehen werden.
Ideallinie
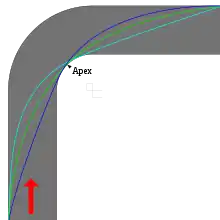
Innerhalb des gegebenen Fahrstreifens hat der Fahrer die Möglichkeit, unterschiedliche Linien zu wählen. Im Rennsport wird als Ideallinie jene bezeichnet, welche auf der gegebenen Strecke die kürzeste Rundenzeit ermöglicht. Dies kann entweder die maximale Geschwindigkeit in der Kurve oder die maximale Geschwindigkeit am Kurven-Ausgang sein, was bei nachfolgender Geradeausstrecke kürzere Rundenzeiten ergibt.
Kurvenein- und -ausgänge werden zum Anbremsen bzw. Beschleunigen genutzt. Wird die Längsbeschleunigung über der Querbeschleunigung des Fahrzeugs aufgetragen, gibt dies Auskunft darüber, wie weit Fahrer und Fahrzeug die physikalischen Grenzen der Reibung ausnutzen.[3]
Kippgrenze
Fahrzeuge mit hohem Schwerpunkt, zum Beispiel Nutzfahrzeuge[4] oder Sport Utility Vehicle bei ungünstiger Beladung, können die Kippgrenze vor der Kraftschlussgrenze erreichen. Die maximale Querbeschleunigung, ab der stationär Kippen möglich ist (Würfelmodell), errechnet sich aus Spurweite S und Schwerpunktshöhe h zu:

(g = Erdbeschleunigung).
Der Faktor SSF wird static stability factor genannt und ist ein Maß für die Überschlagswahrscheinlichkeit. Er wird von der amerikanischen Verkehrssicherheitsbehörde NHTSA für alle neuen PKW ermittelt. Die Fahrzeuge werden in fünf Klassen eingeteilt: 1 Stern für ein sehr hohes Überschlagsrisiko, 5 Sterne für ein geringes.
Die tatsächliche Kippgrenze ist geringer als mit obiger Formel berechnet, da die Schwerpunktsverlagerung durch den Wankwinkel und die Elastizität der Reifen reduzierend wirken.[5]
Bremsen
Bremsen in der Kurve
Bei stationärer Kurvenfahrt stellt sich ein Momentengleichgewicht um die Fahrzeug-Hochachse durch den Schwerpunkt ein. Beim Bremsen erhöht sich die Achslast an der Vorderachse, während sie sich an der Hinterachse um den gleichen Betrag verringert. Bei Bremskräften deutlich unterhalb der Blockiergrenze nimmt die Seitenkraft an der Hinterachse zunächst ab und an der Vorderachse zu. Bei festgehaltenem Lenkrad zeigt das Fahrzeug eine Reindrehreaktion (Bahnradius wird geringer) bei der ein neuer Gleichgewichtszustand gesucht wird. Dies geschieht durch Erhöhen der Giergeschwindigkeit und des Schwimmwinkels. In Extremfällen findet sich kein neues Gleichgewicht, das Fahrzeug schleudert. Bei Fahrzeugen mit Fahrdynamikregelung werden in solchen Fällen ungleiche Bremskräfte kurvenaußen/kurveninnen erzeugt, und damit ein stabilisierendes Giermoment.
Bremsen auf einseitiger Glätte
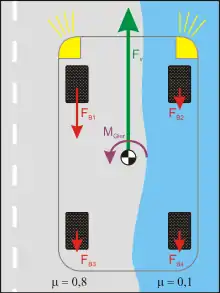
Da auf der glatten Seite nur geringe Bremskräfte abgesetzt werden können, entsteht ein Giermoment, welches das Fahrzeug in Richtung griffige Seite zieht. Zur Stabilisierung wird ein Gegenmoment durch die Seitenkräfte benötigt. Die glatte Seite leistet dabei nur einen sehr geringen Beitrag. Das Fahrzeug wird zum „Zweirad“.
Das Gegenmoment muss letztlich der Fahrer durch Gegenlenken aufbringen. Um die Geradeausfahrt beizubehalten, muss die Summe der Seitenkräfte an Vorderachse und Hinterachse Null sein. Es stellt sich daher ein Schwimmwinkel ein.
Um dem Fahrer Zeit zur Reaktion zu geben, schwächen Regelsysteme das Giermoment ab, das heißt, sie verzögern den Aufbau des destabilisierenden Giermoments. An der Hinterachse wird teilweise durch eine „select-low-Regelung“ dafür gesorgt, dass dort keine zusätzliche Bremskraftdifferenz entsteht.
Fahrzeug-Komponenten
Für die Fahrphysik wesentlichen Fahrzeug-Komponenten sind:
- Reifen
- Regelsysteme
- Massenverteilung (Achslastverteilung, Schwerpunktshöhe)
- Federung, Dämpfung
- Radaufhängung
- Antriebskonzept
- Frontantrieb
- Standardantrieb
- Heckantrieb
- Allradantrieb
- Aerodynamik
Literatur
- Hans-Hermann Braess, Ulrich Seiffert: Vieweg Handbuch Kraftfahrzeugtechnik. 2. Auflage, Friedrich Vieweg & Sohn Verlagsgesellschaft mbH, Braunschweig/Wiesbaden, 2001, ISBN 3-528-13114-4
- Karl-Heinz Dietsche, Thomas Jäger, Robert Bosch GmbH: Kraftfahrtechnisches Taschenbuch. 25. Auflage, Friedr. Vieweg & Sohn Verlag, Wiesbaden, 2003, ISBN 3-528-23876-3
Weblinks
Einzelnachweise
- Hermann Winner, Stephan Hakuli, Gabriele Wolf (Hrsg.): Handbuch Fahrerassistenzsysteme. 2. Auflage. Vieweg+Teubner, 2012, ISBN 978-3-8348-1457-9, S. 522 (eingeschränkte Vorschau in der Google-Buchsuche).
- Konrad Reif (Hrsg.): Fahrstabilisierungssysteme und Fahrerassistenzsysteme. 1. Auflage. Vieweg+Teubner, 2010, ISBN 978-3-8348-1314-5, S. 20 (eingeschränkte Vorschau in der Google-Buchsuche).
- Bernt Spiegel: Die obere Hälfte des Motorrads. 5. Auflage. Motorbuch Verlag, 2006, ISBN 3-613-02268-0, S. 131.
- Hermann Winner, Stephan Hakuli, Gabriele Wolf (Hrsg.): Handbuch Fahrerassistenzsysteme: Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort. 2. Auflage. Vieweg+Teubner, 2012, ISBN 978-3-8348-1457-9, S. 433 (eingeschränkte Vorschau in der Google-Buchsuche).
- C. Rill: Fahrzeugdynamik. S. 42–44, abgerufen am 1. Januar 2019.