Stabilisator (Automobil)
Der Stabilisator ist eine Feder im Fahrwerk eines Automobils, die den bei Kurvenfahrt entstehenden Wankwinkel reduziert und mit dem das Eigenlenkverhalten bei großen Querbeschleunigungen abgestimmt wird.[1][2]
Bauarten und Funktionsweise
.jpg.webp)
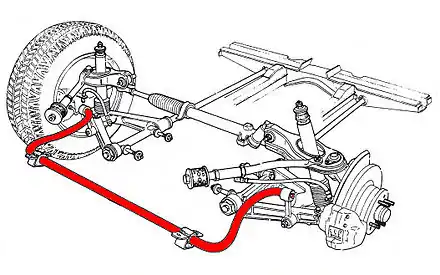
 eine Vorderachse: Stabilisator (gelb), Pendelstütze (rot) zu MacPherson-Federbein
eine Vorderachse: Stabilisator (gelb), Pendelstütze (rot) zu MacPherson-Federbein
In der Regel ist der Stabilisator eine Drehstabfeder, d. h. ein Rundstahl mit gleichsinnig umgebogenen Enden (U-förmig, zwei Hebelarme), der die Räder einer Achse verbindet. Der gerade Mittelteil ist üblicherweise am Fahrzeugaufbau drehbar gelagert, und die beiden Hebelarme sind am Radträger oder einem Lenker über eine Pendelstütze angekoppelt (siehe nebenstehende Abbildungen). Bei der MacPherson-Achse war der Stabilisatorarm ursprünglich Teil des unteren Dreieckslenkers und damit radführend. Bei Starrachsen können Drehlagerung und Ankopplung vertauscht sein: Stabilisator-Mittelteil an der Achse, Hebelarme am Fahrzeugaufbau.
Bei Kurvenfahrt entstehen durch die Wankneigung Federwegdifferenzen kurvenaußen/kurveninnen. Die Federwegdifferenzen lenken den Drehstab aus und führen zu Radlastdifferenzen. Diese wirken dem Wankmoment entgegen, das durch die Fliehkraft am Fahrzeugaufbau entsteht; der Wankwinkel wird reduziert und die Wankmomentenverteilung wird in Richtung dieser Achse verlagert. Die Radlastdifferenzen der Achse werden durch den Stabilisator vergrößert und beeinflussen auf Grund des degressiven Verlaufs der Seitenkraft des Reifens über der Radlast das Eigenlenkverhalten, insbesondere im Grenzbereich.[3] Das erwünschte untersteuernde Verhalten erfordert im Allgemeinen eine Umverteilung des gesamten abgestützten Wankmoments auf die Vorderachse. Deshalb ist an der Vorderachse stets ein Stabilisator vorzusehen.[4] An der Hinterachse wird durch einen Stabilisator die Untersteuertendenz verringert.
Beim gleichsinnigen Ein- und Ausfedern beider Räder einer Achse, z. B. beim „Bremsnicken“, hat der Stabilisator keine Wirkung, da seine beiden Hebelarme in die gleiche Richtung mitgenommen werden.
Bei Fahrzeugen mit Querblattfeder kann diese die Funktion des Stabilisators mit übernehmen. Sie ist dann nicht in der Mitte fest eingespannt, sondern in zwei auseinanderliegenden Punkten am Wagenkörper gelenkig befestigt, die Enden sitzen an den Radträgern. Sie wird dann beim wechselseitigen Federn S-förmig gebogen.
Ausgleichsfeder
Kombiniert man weichere Tragfedern mit einer Ausgleichsfeder, so wird das abgestützte Wankmoment in Richtung der anderen Achse verlagert; der Wankwinkel vergrößert sich. Die Ausgleichsfeder hat somit die umgekehrte Wirkung eines Stabilisators. Ausgleichsfedern wurden bis in die 1980er Jahre (beim VW Käfer aus deutscher Produktion bis 1978) an der Hinterachse heckangetriebener Fahrzeuge mit Pendelachse eingesetzt, um deren Übersteuerneigung zu reduzieren.
Aktive Stabilisatoren
Die Verwendung immer härterer Stabilisatoren zur Reduktion des Wankwinkels bringt Nachteile beim Fahrkomfort und bei der Traktion von Geländefahrzeugen, die eine große Achsverschränkung benötigen. Aktive Stabilisatoren sind daher eine logische Weiterentwicklung der Technik, um die Zielkonflikte Fahrdynamik/Fahrkomfort oder Fahrdynamik/Geländegängigkeit besser aufzulösen. Der aktive Stabilisator wurde 1994 erstmals von Citroën im Modell Xantia Activa eingeführt.
Das Drehstabgestänge wird an einer Stelle aufgeschnitten und an dieser Stelle ein hydraulischer oder elektrischer Aktuator eingesetzt. Bereits bei sehr geringen Federwegdifferenzen können so Radlastdifferenzen zwischen den beiden Rädern einer Achse erzeugt werden. Diese reduzieren wie beim passiven Stabilisator die Wankneigung und beeinflussen die Unter-/Übersteuertendenz. Bei Geradeausfahrt wird die Torsion des Drehstabs zur Verbesserung des Fahrkomforts verringert. Beispiele für die aktive Wankstabilisierung gibt es bei vielen namhaften Herstellern, z. B. bei Porsche Dynamic Chassis Control PDCC.[5]
Einzelnachweise
- Erich Schindler: Fahrdynamik: Statik, Grundlagen des Lenkverhaltens und ihre Anwendung für Fahrzeugregelsysteme. expert verlag, 2007, ISBN 978-3-8169-2658-0.: (eingeschränkte Vorschau in der Google-Buchsuche)
- Wolfgang Matschinsky: Bestimmung mechanischer Kenngrößen von Radaufhängungen. Von der Fakultät für Maschinenwesen der Technischen Universität Hannover zur Erlangung des akademischen Grades Doktor-Ingenieur genehmigte Dissertation, 1992, S. 67,68
- Rolf Isermann: Fahrdynamik-Regelung: Modellbildung, Fahrerassistenzsysteme, Mechatronik. 1. Auflage. Vieweg & Sohn, 2006, ISBN 978-3-8348-0109-8.: (eingeschränkte Vorschau in der Google-Buchsuche)
- Wolfgang Matschinsky: Radführungen der Straßenfahrzeuge: Statik, Kinematik, Elasto-Kinematik und Konstruktion. 3. Auflage. Springer, 2007, ISBN 978-3-540-71196-4, S. 87.: (eingeschränkte Vorschau in der Google-Buchsuche)
- Gedämpfter Wankelmut: Ideen aus der Fahrwerkstechnik, heise.de, 1. April 2008, abgerufen am 12. November 2018.