Deep Space 1
Die US-amerikanische Raumsonde Deep Space 1 (oder kurz DS1) wurde am 24. Oktober 1998 zum Test neuer Technik und Programme gestartet und operierte bis zum 18. Dezember 2001. DS1 war die erste Mission im Rahmen des sogenannten New Millennium Programs zur Erprobung neuer Raumfahrttechniken. Die Mission ermöglichte zusätzlich die wissenschaftliche Beobachtung des Asteroiden (9969) Braille sowie des Kometen 19P/Borrelly. Den Namen der Sonde wählte die NASA aufgrund der getesteten Techniken für Missionen in den tiefen Raum, nicht in Anlehnung an die Star-Trek-Serie Deep Space Nine.

Die Mission kostete insgesamt weniger als 150 Millionen US $ für die Primärmission, darin enthalten waren alle Entwicklungskosten für die Techniken, weitere 10 Millionen US $ kostete die Verlängerung der Mission inklusive der Kosten für die „hyperextended Mission“ nach der Begegnung mit Borrelly.[1] Nach anderer Quelle betrugen die kompletten Missionskosten 152,3 Millionen US $, davon 94,8 Millionen für die Entwicklung, 43,5 Millionen für den Start, 10,3 Millionen für den Betrieb und 3,7 Millionen für die Wissenschaft.[2]
Missionsziele
Primäres Missionsziel war der Test von einem Dutzend neuer Techniken, teilweise in experimentellem Stadium. Man wollte Erfahrungen mit der Zuverlässigkeit der Technik sammeln, bevor sie in einer teuren wissenschaftlichen Mission eingesetzt werden sollte. Der erstmalige Einsatz neuer Technik in einer Raummission bringt trotz aller Tests immer ein gewisses Risiko mit sich. Diese Mission nahm als sogenannte „high-risk, high-benefit mission“ die Risiken von allen zwölf Techniken zugleich auf sich. Ein Versagen einer Technik wäre in diesem Fall nicht gleichbedeutend mit dem Versagen eines Missionsziels, wenn die Daten die Analyse der Fehler ermöglichen und die Einsatzmöglichkeiten und Grenzen der Technik für spätere Missionen bestimmt werden können.
Generell fielen die Missionsziele in zwei Kategorien: zunächst Techniken, die Raumfahrzeuge kleiner oder leichter und preiswerter machen, dann Techniken, die Raumfahrzeuge autonomer machen und somit Personal und Nutzungszeit von großen Antennanlagen wie dem Deep Space Network (DSN) und Bodenstationen einsparen.[3]
Außer der Technik selbst wurden noch weitere Ziele getestet: Es wurden die Grenzen von zeitlich eng begrenzter Entwicklungszeit für Deep-Space-Missionen ausgetestet. Die Anfangsstudie für DS1 mit nur sehr vagen Vorgaben kam nur 39 Monate vor dem Start, eine bisher unerreicht kurze Zeit für eine solche Mission. Die eigentlichen Missionsziele wurden 26 Monate vor dem Start festgelegt. Der Start war in einem extrem ehrgeizigen Zeitplan ursprünglich für Juli 1998 geplant, jedoch wurde klar, dass die Integration von ungetesteten Komponenten und Software ein unkontrollierbares Risiko darstellte und so wurde der Start auf Oktober verschoben und die ursprünglichen Flugpläne und Flugziele wurden abgeändert.[4] Die Anfangsplanung sah als Ziele Komet 76P/West–Kohoutek–Ikemura und Asteroid (3352) McAuliffe vor.[5] Ein Teil der Software war selbst beim Start noch nicht fertig und musste später ergänzt werden.
Neu war auch die Steuerung und Überwachung der Mission vom Boden aus mit dem Advanced Multi-Mission Operations System (AMMOS). Diese Form der Bodenkontrolle erlaubt, dass viele verschiedene Missionen sich Einrichtungen und Personal in einem Zeitplan teilen können. Es gibt aus diesem Grund standardisierte Grundfunktionen für Missionen, die auf die jeweilige Mission angepasst werden können und die Mission bekommt bestimmte Vorgaben, um mit AMMOS effektiv betrieben werden zu können. Die Ingenieure können Missionen und komplexe Flugmanöver vorausplanen. AMMOS kann zur gegebenen Zeit vorgeplante Kommandos zum Raumfahrzeug senden und empfangene Daten aller Art weiterverarbeiten und archivieren, Telemetriedaten berechnen und technische Daten der Raumfahrzeuge überwachen. DS1 war die erste Mission, die ausschließlich mit den Fähigkeiten von AMMOS gesteuert wurde. Die meisten wissenschaftlichen Missionen der NASA arbeiten inzwischen mit AMMOS zur Bodenkontrolle und sogar ältere Missionen wurden inzwischen von AMMOS übernommen.[6]
Technik
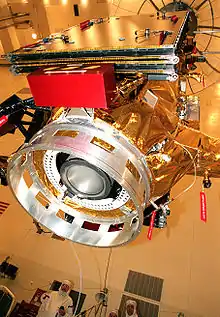
Der Sondenkörper hat die Abmessungen 1,1 × 1,1 × 1,5 m, mit den Anbauten und Folien 2,1 × 1,7 × 2,5 m. Wenn die Solarmodule ausgefahren sind, ergibt sich eine Spannweite von 11,8 m. Das Startgewicht war 490 kg, wovon 31 kg Hydrazin für die Lageregelung und 82 kg Xenon für den Ionenantrieb waren. Die Solarmodule haben eine Leistung von 2400 Watt.[7]
Hauptprozessor war der IBM RAD6000[8], auf dem das Echtzeitbetriebssystem VxWorks zum Einsatz kam. Im Gegensatz zu anderen Missionen gab es keinen Reservecomputer, der während eines Computerfehlers oder eines Neustarts die Kontrolle übernehmen konnte. Viele Komponenten wie Batterie, Hydrazintriebwerke, Trägheitsmesssystem, Star Tracker und Sonnensensor waren preiswerte Standardteile, manche übriggebliebenen Teile von anderen Missionen wurden eingebaut. Von Mars Pathfinder stammte die übrig gebliebene Hochgewinnantenne, die Steuerelektronik für die Steuerdüsen war ähnlich, der Computer war identisch und die Software war ebenfalls Pathfinder nachempfunden. Vieles von Pathfinders Testständen und Prüfgeräten wurde ebenfalls weiterverwendet.[9] Zur Kommunikation diente eine 30-cm-Hochgewinnantenne für X-Band, drei Niedriggewinnantennen, sowie eine vergleichsweise kleine Ka-Band-Antenne.
In der Sonde wurden außer den Standardfunktionen für den Betrieb zwölf neue Techniken eingebaut und getestet. Aus verschiedenen Gründen wurde auf redundante Systeme weitgehend verzichtet, allerdings konnten manche Systeme Funktionen anderer Systeme übernehmen. Gegenüber den Techniktests waren die wissenschaftlichen Ergebnisse nur ein Nebenprodukt.
NSTAR-Ionenantrieb
Das wichtigste Ziel der Mission war der erste Einsatz des Ionenantriebs „NASA Solar Technology Application Readiness“ (NSTAR) unter realen Bedingungen. Der Xenon-Ionenantrieb hat einen Durchmesser von 30 cm und hätte bei voller Schubkraft maximal 2500 Watt an elektrischer Leistung benötigt, 500 Watt bei minimaler Leistung. Da die Solarmodule nicht so viel Leistung erbringen konnten und zusätzliche Leistung für den Betrieb der übrigen Systeme gebraucht wurde, konnte der Ionenantrieb nicht bei Maximalleistung getestet werden.[10] Das Triebwerk konnte in 112 Stufen betrieben werden, die höchste erreichte Stufe war 90. Der Schub betrug 0,09 Newton bei Maximum und 0,02 Newton bei Minimum.[2]
Beim Test des Ionenantriebs wurden die Prognosen aus den Tests im Labor überprüft in Leistung, Dauerbetrieb, Abnutzung und Wirkungsgrad. Abgesehen von den Schwierigkeiten am Anfang der Mission arbeitete der Antrieb erwartungsgemäß und bewies seine Tauglichkeit.[11] Bis zur Deaktivierung am 18. Dezember 2001 wurde der Antrieb über 200-mal gestartet und war insgesamt 16.246 Stunden in Betrieb, er verbrauchte in dieser Zeit 72 kg Xenon.[12] Die Zuverlässigkeit des Ionenantriebs war ein entscheidendes Ergebnis für die Raumsonde Dawn, die mit drei NSTAR-Ionenanantrieben ausgerüstet wurde.
An Bord war das sogenannte „Ion Propulsion System Diagnostic Subsystem“ (IDS), das vor allem die Funktion des Ionenantriebs überprüfen sollte. Da die Auswirkungen des „Ion Propulsion System“ (IPS) unproblematisch waren, wurde dieses Instrument umprogrammiert, um wissenschaftliche Daten gewinnen zu können. Es besteht aus zwölf Sensoren, darunter eine Antenne für Plasmawellen und zwei Magnetometer mit Suchspulen. Ein Magnetometer arbeitete nicht und wurde vermutlich bereits vor dem Start durch ein starkes Magnetfeld durch Wechselstrom beschädigt. Das zweite Magnetometer arbeitete in drei Achsen im Frequenzbereich zwischen 10 Hz und 50 kHz. Der Messbereich war 100 nT mit einer Auflösung von 1 pT.[13]
Solarmodule
Die neuartigen Solarmodule waren mit „Refractive Linear Element Technology“ (SCARLET) ausgestattet, einer Form von Solarkonzentratoren.[14] Die Module haben 720 Fresnel-Linsen aus Silizium, die Licht auf 3600 hocheffiziente Mehrschicht-Solarzellen aus Indiumgalliumphosphid, Galliumarsenid und Germanium werfen. Sie haben 2400 Watt Leistung bei 100 Volt Spannung, wobei die Leistung mit zunehmender Alterung und Abstand zur Sonne abnimmt. Sie haben circa 15–20 % mehr Leistung, als bis dahin übliche Solarmodule gleicher Größe.[15] Da der Ionenantrieb viel Energie braucht, musste zuerst die Leistung der neuartigen Solarmodule unter verschiedenen Bedingungen überprüft werden. Getestet wurde auch der Alterungsprozess unter der Weltraumstrahlung.
Autonome Navigation (AutoNav)
Zuvor wurden Raumfahrzeuge gesteuert, indem vom Boden aus die Radiosignale verfolgt und daraus Position und Kurs berechnet werden, gelegentlich werden Aufnahmen vom Zielobjekt gemacht, um genauer die Position zu bestimmen. Kommandos vom Boden aus zünden dann die Triebwerke für die Feinkorrektur. Es muss dazu regelmäßiger Funkverkehr aufrechterhalten werden. AutoNav übernahm nun diese Rolle des Bodenteams. Konventionelle Raumfahrzeuge mit chemischem Antrieb werden nur in der Startphase stark beschleunigt. Die meiste Zeit vergeht mit einer antriebslosen Flugbahn, die einem ballistischen Objekt entspricht, unterbrochen nur von kurzen Stößen der Hydrazin-Lagekontrolldüsen oder von einzelnen Einsätzen des Hauptantriebs für wenige Minuten oder Sekunden. Deep Space 1 hingegen wurde über Tage und Wochen angetrieben und konnte in dieser Zeit die Antenne nicht zur Erde drehen. Der permanente Antrieb veränderte ständig die Flugbahn und es brauchte daher eine andere Art der Navigation.
AutoNav konnte selbstständig die Orientierung der Sonde im Raum erkennen, die Sonde ausrichten und den Ionenantrieb steuern. Es erkannte den Abstand zur Sonne und die Menge an elektrischer Leistung, die für den Antrieb zur Verfügung steht. Beim Start waren die Bahnen von 250 Asteroiden und die Positionen von 250.000 Sternen im Computer gespeichert. AutoNav kannte die Bahnen von Asteroiden und die Positionen der Fixsterne und konnte anhand der Parallaxe die eigene Position bestimmen. Anfangs wurden dreimal in der Woche Aufnahmen von vier bis fünf Asteroiden gemacht, später dann einmal in der Woche von sieben Asteroiden. Während der Aufnahmen war das Ionentriebwerk abgestellt, damit die Sonde die Kamera in Richtung der Asteroiden drehen konnte. Die Aufnahmen wurden von AutoNav ausgewertet und Befehle setzten gezielt dosiert den Ionenantrieb oder die Hydrazintriebwerke in Betrieb. AutoNav war für die korrekte Funktion auf gute Aufnahmen angewiesen, jedoch wurde die Kamera von unerwartetem Streulicht beeinträchtigt und die Optik verzerrte die Aufnahmen vor allem im Randbereich, was beides negative Auswirkungen hatte. Insgesamt zeigte sich im Verlauf der Mission, dass die Qualität der Aufnahmen ein kritischer Faktor war.
Autonomous Remote Agent
Der „Remote Agent“ war eine Art Autopilot für einen vorbestimmten Kurs, er konnte einen komplexen vorgegebenen Plan für die Experimente abarbeiten, ohne Befehle oder Überwachung von der Bodenstation zu benötigen. Der Remote Agent setzte dabei die Zielvorgaben für AutoNav. Die Software erlaubte dem Raumfahrzeug, eigenständige Entscheidungen zu treffen, Komponenten oder Backupsysteme automatisch aus- oder anzuschalten, wobei vom Boden her nur allgemeine Vorgaben gemacht wurden. Das Bodenteam verlässt sich darauf, dass der Agent selbst einen Weg findet und entsprechende Entscheidungen trifft, um diese Vorgaben zu erfüllen, auch für den Fall, dass Systeme ausfallen oder ungeplante Ereignisse stattfinden.
Die Software enthielt auch einen Fahrplan, der festlegt, was zu einer bestimmten Zeit oder bei einem bestimmten Ereignis zu tun ist. Die Entscheidungen wurden getroffen anhand des Systemzustands, den Beschränkungen, denen eine Mission unterliegt, und den allgemeinen Missionsvorgaben. Entsprechend gibt das System eine Reihe von Befehlen an das entsprechende Teilsystem. Es wird dabei überwacht, wie die Systeme auf die Befehle reagieren, und wiederholt sie oder gibt veränderte Befehle, falls das Ergebnis anders ist, als vorhergesehen. Der Remote Agent war nicht während der gesamten Mission in Betrieb und Softwareupdates wurden auch noch während der Mission hochgeladen.
Beacon Monitor
Das Beacon-Monitor-Operations-Experiment war eine einfache Kommunikationsmethode zwischen Sonde und Bodenstation. Die Sonde arbeitet dabei als „Leuchtfeuer“ und gibt nur ein einziges Signal aus. Die bisherigen Missionen verließen sich auf regelmäßige Übermittlung von Telemetriedaten. Dieses erfordert jeweils den häufigen und kostenintensiven Einsatz des DSN sowie Personal zur Auswertung der Daten im Mission-Control-Zentrum. Die Sonde war mit genügend Intelligenz ausgestattet, so dass sie selbst über ihren Zustand informiert war und entscheiden konnte, ob ein Eingreifen von der Bodenstation aus erforderlich war. Der Beacon Monitor gab nur vier verschiedene einfache Signale aus, die der Bodenstation generelle Auskunft über den Zustand der Sonde geben. Das einfache Signal war nicht codiert und zum Empfang reichten einfache Antennen von 3 bis 10 Metern Durchmesser, so dass das DSN nicht unbedingt nötig war. Ein „grünes“ Signal zeigte einen normalen Verlauf, ein „oranges“ Signal zeigte etwas Unvorhergesehenes, aber dass die Sonde das Problem lösen konnte und alle Werte akzeptabel sind, oder dass Kontakt innerhalb von vier Wochen nötig ist. Ein „gelbes“ Signal zeigte, dass die Sonde Daten senden will oder dass eine bestehende Entwicklung über längere Zeit in der Zukunft zu einem Problem führen könnte, oder dass Kontakt innerhalb von einer Woche nötig ist. Ein „roter“ Ton zeigte hingegen ein schwerwiegendes Problem an, das die Elektronik nicht regeln konnte und schnelles Eingreifen von der Bodenstation erforderlich machte. Der Beacon Monitor arbeitet mit aktivitätsabhängigen Limits. Ein Wert einer Messung kann bei wenig Aktivität außerhalb der Limits liegen, während einer Aktivität jedoch völlig im Normbereich sein. Der Beacon Monitor kontrollierte nicht die Mission und war nicht die gesamte Zeit in Betrieb, sondern wurde nur testweise betrieben.
Miniature Integrated Camera Spectrometer (MICAS)
Dieses zwölf Kilogramm schwere Instrument kann mehrere Aufgaben zugleich erfüllen: Es arbeitet als Kamera, als Ultraviolett-Bildspektrometer und als Infrarot-Bildspektrometer. MICAS lieferte auch Bilder für das AutoNav. Es verfügt über zwei schwarz-weiß Kameras, ein UV- und ein IR-Bildspektrometer, die alle gemeinsam ein 10-Zentimeter-Teleskop mit Spiegeln aus Siliciumcarbid benutzen. Von den beiden Kameras im sichtbaren Bereich ist eine CCD-Pixelkamera, die andere hat einen CMOS-Active-Pixelsensor. Die Spektrometer müssen einzelne Punkte des Zielobjekts abtasten, um Daten zu erhalten. MICAS sollte mit dem UV-Spektrometer im Sonnensystem verteilten Wasserstoff erkennen. Der UV-Kanal sollte im Bereich zwischen 80 nm and 185 nm Wellenlänge arbeiten, konnte jedoch keine brauchbaren Daten gewinnen. Der Fehler lag irgendwo in der Kette nach den Photondetektoren. In der Praxis verminderte Streulicht in der Kamera den wissenschaftlichen Wert der Daten und erschwerte die Auswertung durch AutoNav. Einige Designänderungen und eine andere Montage der Kamera könnte bei zukünftigen Missionen dieses Problem beheben.[4]
Plasma Experiment for Planetary Exploration (PEPE)
Das „Plasma Experiment for Planetary Exploration“ (PEPE) ist ein sechs Kilogramm schweres Mehrzweckinstrument zur Untersuchung von Plasma und geladenen Teilchen. Das Gerät kann Elektronen und Ionen erkennen. Es wurde getestet, wie sich der Ionenantrieb auf die Messergebnisse auswirkt. Es arbeitete wie mehrere physikalische Beobachtungsgeräte, daneben untersuchte es die Auswirkungen des Ionenantriebs auf die Oberfläche der Sonde und auf die Instrumente und untersuchte, wie der Ionenantrieb mit dem Sonnenwind interagiert. Es konnte außerdem wissenschaftlich interessante Daten aus dem Flyby am Asteroiden gewinnen.
Im Januar 1999 waren DS1 und Cassini günstig zueinander angeordnet und unternahmen gemeinsam für 36 Stunden Messungen des Sonnenwinds, wobei beide Sonden circa 0,5 AU voneinander entfernt waren.[4] Für volle Funktionalität arbeitete das Gerät mit einer Spannung von 15.000 Volt. Die meiste Zeit konnte nicht genügend Energie von den Solarpanelen erzeugt werden, so dass es in diesem Fall bei Spannungen von circa 8.000 Volt betrieben werden musste. In diesem Fall konnten komplexe und schwere Ionen nicht erfasst werden. Der Messbereich von PEPE für Elektronen ist 10 eV bis 10 keV und für Ionen von 3 eV bis 30 keV.[16]
Small Deep-Space Transponder
Der drei Kilogramm schwere „Small Deep-Space Transponder“ soll die Telekommunikationshardware verbessern. Er enthält einen Kommandodetektor, eine Telemetriemodulation, einen Tongenerator für den „Leuchtfeuer“-Modus, sowie Kontrollfunktionen. Er kann im X-Band senden und empfangen, sowie im Ka-Band senden. Geringes Gewicht und Abmessungen sind möglich durch Verwendung von integrierten Mikrowellen-Chips aus Einkristall-Galliumarsenid, dichte Anordnung und Verwendung anwendungsspezifischer Silizium-ICs. Verschiedene Tests wurden zugleich im X-Band und im Ka-Band ausgeführt, um die Ergebnisse vergleichen zu können. 2001 Mars Odyssey und andere Marsmissionen verwendeten später diesen Sender, weil er sich bewährt hat.
Ka-Band Solid-State Power Amplifier
Dieser sehr kleine und 0,7 kg leichte Verstärker mit einer Sendeleistung von 2,3 W erlaubt aufgrund der höheren Frequenz im Ka-Band höhere Datenraten gegenüber der bis dahin allgemein üblichen Kommunikation im X-Band.[17] Das Ka-Band erlaubt dieselbe Datenrate mit einer kleineren Antenne, ist jedoch beim terrestrischen Empfang anfälliger gegen Wettereinflüsse. Der Sender wurde nicht nur zur Kommunikation eingesetzt, sondern auch für allgemeine Experimente zur Kommunikation im Ka-Band. Zur Zeit der Mission war vom DSN nur der Goldstone-Komplex mit entsprechender Technik für Ka-Band ausgestattet, so dass alle Experimente mit der Station in Goldstone ausgeführt wurden.
Low-Power Electronics
Es handelte sich dabei um extrem energiesparende Mikroelektronik, unempfindlich gegen Strahlung. Das Experiment arbeitete mit niedrigen Spannungen, besaß eine Logik für wenig Aktivität, eine energiesparende Architektur und ein Strom-Management. Getestet wurde ein Ringoszillator, Transistoren und ein Vervielfacher mit minimalem Stromverbrauch. Ein Dosimeter zeigte am Ende der Mission eine gesamte Strahlenbelastung von 450 Gray.[18]
Multifunktionale Struktur
Die multifunktionale Struktur ist ein weiterer Schritt zur Gewichtseinsparung, zu weniger Komponenten und mehr Zuverlässigkeit. Bisher waren tragende Funktionen, Temperaturregelungsfunktion und elektronische Funktionen getrennt entwickelt und in verschiedenen Teilen untergebracht. Alle Teile wurden dann mit großen Steckverbindern und Kabelbäumen zur Stromversorgung und Datenübermittlung verbunden. Die multifunktionelle Struktur verbindet Temperaturregelung und Elektronik und ersetzt zugleich eines der Panel des Sondenkörpers. Es hat Kupfer-Polyimid-Folie auf der einen Seite und eingebaute Wärmetransportvorrichtungen. Die Oberfläche dient zur Wärmeabstrahlung und die Verkabelung wird mit der Polyimid-Folie geschaffen. Flexible Verbindungen zwischen den Folien ermöglichen Stromversorgung und Datenverteilung.
Power-Activation- and Switching-Modul
Dieses Modul besteht aus acht sehr kleinen elektrischen Schaltern, die in redundanten Paaren angeordnet sind, somit können vier elektrische Verbraucher überwacht werden. Die Schalter registrieren Spannung und Strom und können den Strom begrenzen.
Verlauf
- Deep Space 1 startete am 24. Oktober 1998 auf einer Delta-II-7326-Trägerrakete. Die Trägerrakete war die erste dieser Bauart. Als zusätzliche Nutzlast hatte sie SEDSAT-1 an Bord. Bereits beim Start wurden drei neue Technologien eingesetzt.[19]
- Am 10. November wurde der Ionenantrieb erstmals getestet, dabei schaltete sich der Antrieb nach 4,5 Minuten wieder ab und konnte zunächst nicht wieder gestartet werden.[20] Am 24. November gelang es den Ionenantrieb wieder zu starten. Als Ursache für das Problem wird ein temporärer Kurzschluss vermutet.[21]
- Am 12. November arbeitete der Star Tracker fehlerhaft. Es handelt sich dabei um ein zugekauftes Standardmodell.[22] Ein Problem für die Arbeit der AutoNav-Software war unerwartetes Streulicht in der MICAS-Kamera, was die Auswertung der Bilder erschwerte. Ein erstes Softwareupdate ermöglichte den Weiterbetrieb. AutoNav konnte die Position auf 2000 Kilometer genau bestimmen.
- Anfang Februar 1999 wurde die Software des Onboard-Computers das erste Mal erneuert, um alle Tests durchzuführen, die ersten Ergebnisse der Tests ausnutzen zu können und Programmierfehler zu beseitigen.[23]
- Am 15. März 1999 wurde nach einem längeren antriebslosen Flug der Ionenantrieb wieder aufgenommen. Für jeweils sechseinhalb Tage arbeitete der Antrieb, für einen halben Tag in der Woche erfüllte die Sonde andere Aufgaben und richtete die Antenne zur Erde.
- Im Mai 1999 wurde der Remote Agent getestet, dabei wurden dem Remote Agent vom Bodenteam verschiedene Probleme simuliert. Eins der ersten simulierten Probleme war, dass sich die Kamera nicht abschalten ließ. Der Remote Agent gab mehrere Befehle zum Abschalten und entwickelte dann einen alternativen Plan.[24] Der Remote Agent drehte die Sonde so, dass Bilder von Asteroiden gemacht werden konnten und drehte dann die Sonde in Flugrichtung und startete den Ionenantrieb. Während der anschließenden Antriebsphase stoppte der Remote Agent und ebenso der Antrieb unerwartet durch einen Softwarefehler. Die übrigen simulierten Systemfehler wurden richtig erkannt und eine passende Lösung gefunden.[25]
- Anfang Juni 1999 bekam die Sonde ein zweites Softwareupdate. Für das Hochladen von 4 Megabyte Daten wurden drei Tage vom DSN gebraucht, anschließend wurde der Computer heruntergefahren und neu gestartet.[26]
- Am 14. Juni 1999 machte AutoNav die erste vollständig selbstständige Kurskorrektur. Es gab keinen vorgegebenen Plan, das System musste komplett von vorne anfangen. Bei der Kalkulation der korrekten Schubrichtung wäre direktes Sonnenenlicht in die Kamera und in den Star Tracker gefallen. Das System teilte daher die Richtung in zwei Brennphasen in verschiedene Richtungen auf, die zusammen die gewünschte Richtung ergeben. Dieses Verfahren heißt vectoring burn.[27] Im Missionsverlauf zeigte sich immer wieder, dass die Grenzen der Kamera ein limitierender Faktor für AutoNav war.[28]
- Ende Juli 1999, wenige Tage vor der Begegnung wurde der Ziel-Asteroid 1992 KD umbenannt in (9969) Braille. Der Asteroid ist jedoch so klein und dunkel, dass er mit der Kamera auch drei Tage vor dem Flyby noch nicht sichtbar war und AutoNav konnte ihn auf den Aufnahmen nicht entdecken. Als schließlich die Entdeckung mit Hilfe des Bodenteams und spezialisierter Software auf Aufnahmen gelang, war der Asteroid mehr als 400 km von der vorherberechneten Stelle entfernt. Sofort wurde die Sonde auf den neuen Kurs gesetzt.
- Etwas mehr als einen halben Tag vor dem Flyby ging DS1 durch einen Softwarefehler in Save-Mode. Das Bodenteam arbeitete fieberhaft an der Fehlerbehebung und versetzte die Sonde wieder in Flugmodus. Der Flyby geschah am 29. Juli 1999 mit einer Geschwindigkeit von 15,5 km/s in nur 26 km Abstand, geplant waren 15 km, dennoch war es zu der Zeit der dichteste Vorbeiflug einer Sonde an einem Objekt. Zur Zeit der Begegnung war Deep Space 1 1,25 AU oder 188 Millionen Kilometer von der Erde entfernt.[29] Aufgrund mehrerer Probleme konnte AutoNav den Asteroiden mit seiner sehr unregelmäßigen Form bis zum Schluss nicht finden und identifizieren und die Kamera konnte nicht genau genug ausgerichtet werden. Es gelang jedoch Infrarotspektrogramme zu machen und auch der Plasmadetektor lieferte Daten. 15 Minuten nach Flyby drehte sich die Sonde und machte noch eine Aufnahme aus der Entfernung, auf der der Asteroid sichtbar ist.[30]
- Die Sonde brauchte einen Tag, um alle Daten zur Erde zu funken. Die spektrographische Auswertung zeigt ein Profil, das dem Basalt von Vesta entspricht.[31]
- Anfang August 1999 verlängerte Nasa die Mission und das geplante neue Ziel war (4015) Wilson-Harrington und danach 19P/Borrelly, die Ziele veränderten sich entsprechend von einer Mission zum Testen von Komponenten zu einer wissenschaftlichen Mission.[31]
- Am 11. November 1999 fiel der Star Tracker komplett aus, nachdem das Gerät während der gesamten Mission unerklärliche Störungen hatte. Versuche ihn wieder zu aktivieren schlugen fehl. Mit Hilfe des DSN konnte man die Antenne der Sonde zur Erde ausrichten, um neue Software zu laden.[32] Die folgenden Monate vergingen damit eine Lösung für das Problem zu finden und eine neue Software zu entwickeln und im Simulator zu testen. Während dieser Zeit konnte die Sonde nicht angetrieben werden, (4015) Wilson-Harrington wurde dadurch unerreichbar.
- Am 30. Mai 2000 konnte eine fünfte Version der Software geladen werden, die die MICAS-Kamera anstelle des Star Trackers zur Lagekontrolle einsetzen konnte. Das DSN stellte der Mission zusätzliche Kommunikationszeit zur Verfügung für Software-Updates und Tests. MICAS hat ein viel kleineres Beobachtungsfeld und arbeitet völlig anders als der Star Tracker. Die Lagekontrolle erfolgte nun durch anvisieren eines Sterns mit der Kamera: Ein Stern dient als Ziel während der Antriebsphase, ein anderer für die Ausrichtung der Antenne zur Erde. Gegen Ende Juni 2000 konnte das Triebwerk nach verschiedenen Tests wieder eingesetzt werden.[33]
- Am 11. Oktober standen DS1 und Erde auf gegenüberliegenden Positionen, dazwischen die Sonne. Für zwei Tage während der Konjunktion verschwand die Sonde hinter der Sonne, in dieser Zeit war keine Kommunikation möglich.[34]

- Im März 2001 bekam die Sonde ihr sechstes und letztes Update. Es bestand aus über 4 MB an Daten, aufgeteilt in 267 Dateien. Es dauerte vier Tage, um alle Daten über die nur 30 cm große Hauptantenne der Sonde zu empfangen, der Abstand war 2,1 AU zur Erde. Die Software wurde speziell angepasst, um den Kometenkern besser vom Schweif unterscheiden zu können.[35]
- Am 22. September 2001 flog Deep Space 1 am Kometen 19P/Borrelly in etwa 2200 km Abstand vorbei. Diesmal konnten auch Bilder und Spektrogramme gemacht, Winkel und Energie von Elektronen und Ionen gemessen, die Ionenzusammensetzung untersucht und das Magnetfeld analysiert werden. Die Sonde war nicht für eine Begegnung mit einem Kometen ausgelegt, es fehlte ihr ein Schild gegen Staubpartikel etc. so dass diese Beobachtung ein hohes Risiko für eine Beschädigung enthielt; es gab jedoch keine großen Schäden und alle Daten konnten gesendet werden.[36][37]
- Nach dem Vorbeiflug wurden in einer „hyperextended mission“ noch einmal die Ziele neu gesetzt. Es wurden noch einmal alle Systeme getestet, um Vergleichsdaten zu bekommen und Abnutzung oder Abbau durch die Weltraumstrahlung messen zu können. Es wurden dabei auch riskante Tests gemacht und solche, die die Grenzen der Technik austesteten. Alle Tests konnten erfolgreich abgeschlossen werden. Die Sonde war somit fast drei Jahre in Betrieb und umrundete in dieser Zeit die Sonne zweimal, während die Erde die Sonne dreimal umrundete.
- Am 18. Dezember 2001 wurde Deep Space 1 deaktiviert. Es gab kein weiteres Missionsziel, das man mit den verbleibenden Treibstoffen hätte erreichen können. Zu diesem Zeitpunkt war das Ionentriebwerk insgesamt 16.265 Stunden oder 677 Tage in Betrieb und erreichte in dieser Zeit eine kumulierte Beschleunigung von ∆v = 4,3 km/s. Dafür wurden 73,4 kg, also mehr als 90 % der Xenonvorräte verbraucht. Die Software wurde modifiziert, damit der Sender nicht mehr in Betrieb genommen wird, und die Speicherung von Daten wurde blockiert, um ein Überlaufen der Speicher zu verhindern. Alle nicht mehr benötigten Systeme und die Hauptantenne wurden abgeschaltet, nur die drei Notfallantennen blieben in Betrieb. Bei Missionsende verblieb nur noch ein kleiner Rest von Hydrazin, der noch für wenige Monate ausreichte. Sobald die Vorräte aufgebraucht waren, konnte die Sonde die Solarpanele nicht mehr zur Sonne orientieren und hatte somit keinen Strom mehr für den Betrieb. Die Sonde wird jedoch weiterhin auf ihrer Bahn um die Sonne kreisen.[38]
- Entgegen der Erwartung gab es doch noch eine Gelegenheit, bei der der Ka-Sender der Sonde hätte nützlich sein können. Anfang 2002 wurden neue Tests entwickelt, um die Auswirkungen von stürmischem Wetter auf den Empfang von Ka-Frequenzen zu untersuchen. Es gab zu der Zeit außer DS1 kein Raumfahrzeug im All, das die benötigten Signale im Ka-Band hätte liefern können. Angenommen, die Sonde wäre noch zur Sonne ausgerichtet gewesen, wäre die Antenne der Sonde während der Opposition am 10. März 2002 eine Zeit lang ebenfalls zur Erde ausgerichtet. Am 2. und 6. März wurde mit zwei DSN-Stationen versucht Kontakt aufzunehmen, aber die Versuche waren erfolglos wie vorausgesagt und es konnte kein Signal gefunden werden.[1]
Ergebnisse
Deep Space 1 war in technischer Hinsicht ein voller Erfolg. Alle Missionsziele wurden mit Ende der 11 Monate der Primärmission bis September 1999 erfüllt oder übertroffen. Der NSTAR-Ionenantrieb bewährte sich und machte den Weg frei für die Dawn-Mission, die drei solche Triebwerke verwendete. Vor dem Test wurde befürchtet, dass der Ausstoß des Ionentriebwerks möglicherweise die Funkverbindung oder die wissenschaftlichen Instrumente beeinträchtigen könnte. Das PEPE-Instrument war an Bord, um diese Auswirkungen zu erkennen und zu quantifizieren, der Plasmaausstoß verursachte jedoch keine Probleme. Der Small Deep-Space Transponder hat sich bewährt und wurde seither in mehreren Missionen verwendet.
Der Star Tracker war kein Teil des Testprogramms, sondern ein zugekauftes Bauteil, das eigentlich als sehr zuverlässig galt. Der Ausfall führte beinahe zum Ende der Mission, jedoch war die Problemlösung durch neue Software eine eigene Erfolgsgeschichte. Wissenschaftliche Missionen verfügen im Gegensatz zu Deep Space 1 im Regelfall über mehrere redundante Star Tracker.
Auch in wissenschaftlicher Hinsicht konnte Deep Space 1 einiges für sich verbuchen, darunter die erste Messung eines Asteroiden-Magnetfeldes bei Braille. Während es nicht gelang Bilder aus der Nähe von Braille zu machen, war der Vorbeiflug an Borrelly ein voller Erfolg, der einige neue und überraschende Erkenntnisse über Kometen lieferte.
Die Missionen Dawn, New Horizons und einige Marsmissionen konnten die Erfahrungen von DS1 direkt nutzen, indem sie diese Technologien in Wissenschaftsmissionen einsetzten.
Siehe auch
Weblinks
Einzelnachweise
- Marc D. Rayman: The Successful Conclusion of the Deep Space 1 Mission: Important Results without a flashy title. In: Space Technology. Band 23, Nr. 2-3, 2003, S. 185 (englisch, Online [PDF]).
- NASA - NSSDCA - Spacecraft - Details. Abgerufen am 15. Juni 2017.
- NASA (Hrsg.): Deep Space 1, Launch, Press Kit October 1998. S. 3 (Online [PDF]).
- Marc D. Rayman, Philip Varghese, David H. Lehman, Leslie L. Livesay: Results from the Deep Space 1 technology validation Mission. In: Jet Propulsion Laboratory (Hrsg.): Acta Astronautica. Band 47, 2000, S. 475 ff. (Online [PDF]).
- Comet Space Missions. In: SEDS.org. Abgerufen am 20. November 2016.
- AMMOS. (Nicht mehr online verfügbar.) NASA, archiviert vom Original am 14. November 2016; abgerufen am 16. Juni 2017. Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- NASA (Hrsg.): Deep Space 1, Launch, Press Kit October 1998. S. 7 (Online [PDF]).
- Deep Space 1 (DS-1). www.bernd-leitenberger.de. Abgerufen am 16. Juli 2012.
- NASA (Hrsg.): Deep Space 1, Launch, Press Kit October 1998. S. 31 (Online [PDF]).
- NASA (Hrsg.): Deep Space 1, Launch, Press Kit October 1998. S. 24 (Online [PDF]).
- GRC - NSTAR Ion Thruster. Abgerufen am 3. Juni 2017 (englisch).
- David DeFelice: NASA - Deep Space 1 Ion Propulsion System Operation Sequence and Status. Abgerufen am 3. Juni 2017 (englisch).
- The Ion Propulsion System (IPS) Diagnostic Subsystem (IDS). Abgerufen am 17. Juli 2017.
- NASA (Hrsg.): Contributions to Deep Space 1. 14. April 2015 (Online [abgerufen am 3. Juni 2017]).
- NASA (Hrsg.): Deep Space 1, Launch, Press Kit October 1998. S. 26 (Online [PDF]).
- NASA Space Science Data Coordinated Archive HeaderPlasma Experiment for Planetary Exploration (PEPE). Abgerufen am 17. Juli 2017.
- Dr. Marc Rayman's Mission Log, 9. Dezember 1998. Abgerufen am 25. Mai 2017.
- Marc D. Rayman: The Successful Conclusion of the Deep Space 1 Mission: Important Results without a flashy title. In: Space Technology. Band 23, Nr. 2-3, 2003, S. 185 (englisch, Online [PDF]).
- Dr. Marc Rayman's Mission Log 24. Oktober. Abgerufen am 25. Mai 2017.
- Dr. Marc Rayman's Mission Log, 10. November 1998. Abgerufen am 25. Mai 2017.
- Dr. Marc Rayman's Mission Log, 24. November 1998. Abgerufen am 25. Mai 2017.
- Dr. Marc Rayman's Mission Log, 12. November. Abgerufen am 25. Mai 2017.
- Dr. Marc Rayman's Mission Log, 13. Februar 1999. Abgerufen am 25. Mai 2017.
- Dr. Marc Rayman's Mission Log, 19. Mai 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 23. Mai 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 12. Juni 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 20. Juni 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 11. Juli 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 29. Juli 1999. Abgerufen am 28. Mai 2017.
- Dr. Marc Rayman's Mission Log, 1. August 1999. Abgerufen am 7. Juni 2017.
- Dr. Marc Rayman's Mission Log, 8. August 1999. Abgerufen am 7. Juni 2017.
- Dr. Marc Rayman's Mission Log, 16. Januar 2000. Abgerufen am 7. Juni 2017.
- Dr. Marc Rayman's Mission Log, 4. Juli 2000. Abgerufen am 7. Juni 2017.
- Dr. Marc Rayman's Mission Log; 29. Oktober 2000. Abgerufen am 8. Juni 2017.
- Dr. Marc Rayman's Mission Log, 18. März 2001. Abgerufen am 8. Juni 2017.
- Susan Reichley: 2001 News Releases - NASA Spacecraft Captures Best-Ever View of Comet's Core. Abgerufen am 8. Juni 2017.
- Dr. Marc Rayman's Mission Log, 11. September 2001. Abgerufen am 8. Juni 2017.
- Dr. Marc Rayman's Mission Log, 18. Dezember 2001. Abgerufen am 8. Juni 2017.
Gestartete Missionen: ISEE-3/ICE (1978) | Vega (1984) | Sakigake (1985) | Giotto (1985) | Suisei (1985) | Galileo (1989) | Clementine (1994) | NEAR (1996) | Deep Space 1 (1998) | Stardust (1999) | Contour (2002) | Hayabusa (2003) | Rosetta (2004) | Deep Impact (2005) | New Horizons (2006) | Dawn (2007) | Chang’e 2 (2010) | Hayabusa 2 (2014) | Osiris-Rex (2016) | Lucy (2021) | DART (2021)
Geplante Missionen: Near-Earth Asteroid Scout (2022) | Psyche (2022) | Janus (2022) | Destiny Plus (2024) | Hera (2024) | Comet Interceptor (2029)
Gestrichene Missionen: NEAP | Don Quijote | New Asteroid Initiative
Überblick: Chronologie der Raumsonden zu Kometen und Asteroiden