Hayabusa 2
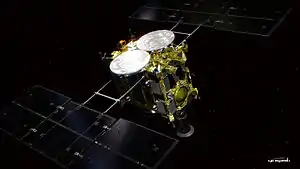
Die Asteroidenmission Hayabusa 2 (japanisch はやぶさ2, daher ist auch die Schreibweise Hayabusa2 verbreitet, deutsch: Wanderfalke 2) ist ein Projekt der japanischen Weltraumagentur JAXA für einen Flug zum Asteroiden (162173) Ryugu und zurück. Die Sonde wurde 2014 gestartet; ihre Probenrückführungskapsel landete am 5. Dezember 2020 wieder auf der Erde. Die Sonde selbst fliegt weiter zu dem Asteroiden 1998 KY26, den sie im Jahr 2031 passieren soll. Hayabusa 2 ist die Nachfolgemission der erfolgreichen Raumsonde Hayabusa (Muses-C). Gebaut wurde Hayabusa 2, wie auch ihre Vorgängerin Hayabusa, von der japanischen NEC Corporation.[3] Ziel ist es, aus den Erfahrungen von Hayabusa zu lernen, die trotz zahlreicher technischer Probleme nach dem Abschluss der Erkundungen des Asteroiden (25143) Itokawa erfolgreich zur Erde zurückgekehrt war.[4]
| Hayabusa 2 | |||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 Hayabusa 2 | |||||||||||||||||||||||||||||||||||||||||||||||||
| NSSDC ID | 2014-076A | ||||||||||||||||||||||||||||||||||||||||||||||||
| Missionsziel | Asteroid (162173) Ryugu | ||||||||||||||||||||||||||||||||||||||||||||||||
| Betreiber | |||||||||||||||||||||||||||||||||||||||||||||||||
| Trägerrakete | H-IIA-202 F-26 | ||||||||||||||||||||||||||||||||||||||||||||||||
| Aufbau | |||||||||||||||||||||||||||||||||||||||||||||||||
| Startmasse | 600 kg | ||||||||||||||||||||||||||||||||||||||||||||||||
| Instrumente | |||||||||||||||||||||||||||||||||||||||||||||||||
|
Probenentnahmesystem | |||||||||||||||||||||||||||||||||||||||||||||||||
| Verlauf der Mission | |||||||||||||||||||||||||||||||||||||||||||||||||
| Startdatum | 3. Dezember 2014, 04:22 UTC[1] | ||||||||||||||||||||||||||||||||||||||||||||||||
| Startrampe | Tanegashima | ||||||||||||||||||||||||||||||||||||||||||||||||
| Enddatum | 2031 | ||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||
Antrieb
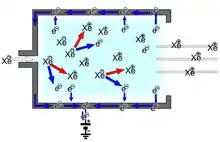
Hayabusa 2 ist mit einem neu entwickelten Ionenantrieb namens mu-10 ausgestattet.
Kommunikation
Die Sonde hat mehrere separate Antennen: Eine Mittelgewinnantenne und eine Hochgewinnantenne für X-Band, eine Mittelgewinnantenne und eine Hochgewinnantenne für Ka-Band. Die Kommunmikation im Ka-Band geschah zu Beginn der Mission mangels eigener Empfangsmöglichkeit über das DSN. Seit im März 2021 die Misasa Deep Space Station eröffnet wurde, können die Signale auch von dieser Antenne empfangen werden.
Aufruf zur Teilnahme an der Mission
Wie schon bei der ersten Hayabusa-Mission ermöglichte die japanische Weltraumagentur unter dem Motto „Let’s meet with Le Petit Prince! Million Campaign 2“[5] die Teilnahme an dem Raumflug. Für diese Aktion konnten Interessierte ihre Namen und kurze Botschaften an die JAXA schicken, die dann auf speziellen Speicherchips mit der Sonde auf die Reise gingen. Ein Chip, der nur Namen enthält, sollte mit dem Zielmarkierer auf dem Asteroiden verbleiben; ein weiterer Chip, der auch Botschaften und Illustrationen speichert, sollte mit der Rückkehrkapsel wieder zur Erde zurückkommen.[6]
Finanzierung
Nach dem Teilerfolg von Hayabusa begann JAXA 2007 mit Untersuchungen für eine mögliche Nachfolgemission.[7] Im Juli 2009 präsentierte Makoto Yoshikawa (heutiger Missionsleiter von Hayabusa 2) die „Hayabusa Follow-on Asteroid Sample Return Missions“. Im August 2010 erhielt JAXA die Genehmigung der japanischen Regierung, mit der Entwicklung von Hayabusa 2 zu beginnen. Die Kosten für das Projekt wurden im Jahr 2010 mit 16,4 Milliarden Yen (ca. 123 Millionen Euro) veranschlagt.[8][9]
Rover
Hayabusa 2 hatte vier kleine Rover an Bord:[10]
- Rover-1A und Rover-1B, die in einem gemeinsamen Container/Lander namens MINERVA-II-1 (3,3 kg) transportiert wurden. Sie sind von identischer Bauweise, haben eine Masse von je 1,1 kg und haben eine zylindrische Form mit 18 cm Durchmesser und 7 cm Höhe. Sie sind beide mit je einer Stereokamera, einer Weitwinkelkamera und Thermometern ausgestattet. Ihre Energie erhalten sie mittels Solarzellen und Superkondensatoren.
- ROVER-2, der in dem Container/Lander MINERVA-II-2 transportiert wurde. Er hat eine Masse von etwa 1 kg und hat die Form eines achteckigen Prismas mit 15 cm Durchmesser und 16 cm Höhe. Er ist mit zwei Kameras, einem Thermometer und einem Beschleunigungssensor sowie LEDs im optischen und UV-Lichtbereich ausgerüstet. Damit sollten umherschwebende Staubpartikel beleuchtet und detektiert werden. ROVER-2 besitzt vier Systeme zur Fortbewegung. Auch ROVER-2 hat Solarzellen zur Energieversorgung.
- Mobile Asteroid Surface Scout (MASCOT), ein Lander und Rover von etwa 9,6 kg Masse mit den etwa schuhkartongroßen Abmessungen 29,5 cm × 27,5 cm × 19,5 cm. Er trägt eine Nutzlast von ungefähr 3 kg und ist mit einem Infrarotspektrometer, einem Magnetometer, einem Radiometer und einer Weitwinkelkamera ausgestattet. Seine äußere Hülle besteht aus einer CFK-Sandwichplattenstruktur. Seine Energie bezog MASCOT aus einer nichtaufladbaren Batterie, die dem Rover etwa 17 Stunden Betrieb ermöglichte.[11]
Alle vier Rover besitzen wegen der niedrigen Gravitation des Asteroiden keine Räder zur Fortbewegung, sondern Schwungmassen für eine springende Fortbewegung. Rover-1A und Rover-1B konnten bis zu 15 Meter weit springen (wobei ein Sprung 15 Minuten dauern konnte);[12] MASCOT sprang 10 bis 70 Meter weit. Die Rover sendeten ihre Daten an die Raumsonde, die sie wiederum zur Erde weiterfunkte.
Beteiligte
Der Hauptauftragnehmer NEC baute die 590 kg schwere Raumsonde, das Ka-Band-Kommunikationssystem und eine Kamera für den mittleren Infrarotbereich.[13]
Rover-1A und Rover-1B wurden von der JAXA und der Universität Aizu (Japanisch: 会津大学) entwickelt, ROVER-2 von einem Konsortium verschiedener Universitäten unter der Leitung der Universität Tōhoku. MASCOT wurde federführend vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Kooperation mit der französischen Raumfahrtagentur CNES und der JAXA entwickelt. Die CNES entwickelte das Infrarotspektrometer von MASCOT, mit dessen Hilfe die Zusammensetzung der Asteroidenoberfläche untersucht werden soll. Das Magnetfeld sollte durch ein Magnetometer der TU Braunschweig vermessen werden. Das Institut für Planetenforschung des DLR stellte die Weitwinkelkamera und das Radiometer bereit. Außerdem stellt das DLR Kapazitäten der 30-Meter-Deep-Space-Antenne der Satellitenbodenstation Weilheim für die Datenübertragung zur Verfügung.
Mission
Start und Missionsplan
Hayabusa 2 wurde am 3. Dezember 2014 mit einer H-IIA-Rakete gestartet.[1] Die Rakete hatte drei weitere Nutzlasten. Eine war PROCYON, eine kleine 75 kg schwere Sonde mit Ionenantrieb, die bis 2016 zum Asteroiden 1858512000 DP fliegen sollte, aber ihr Ziel nicht erreichte, weil der Ionenantrieb versagte. Eine weitere Nutzlast war Shin’en 2, ein ungefähr 15 kg schweres, von Studierenden gebautes, ungefähr kugelförmiges Radioexperiment mit einem Durchmesser von knapp 50 cm und ARTSAT2-DESPATCH.
Das Ziel für Hayabusa 2 war ein erdnahes Objekt, der Asteroid (162173) Ryugu. Nach der Ankunft am Asteroiden sollte zunächst die Oberfläche des Himmelskörpers vermessen werden. In einem zweiten Schritt sollten dann zwei MINERVA-II-Landungsroboter und der Asteroidenlander MASCOT zum Einsatz kommen.
Die Sonde nahm Bodenproben auf.[14] Die Sonde näherte sich dazu am 21. Februar 2019 dem Asteroiden, bis ein spezieller Trichter (sampling horn) die Oberfläche berührte. Im Moment des Aufsetzens wurde eine projektilbildende Ladung aus 5 Gramm Tantal mit 300 m/s auf die Oberfläche abgefeuert und herausgesprengtes Material mit dem Trichter eingefangen.
Für die Entnahme von Material aus tieferen Schichten des Asteroiden, das der Weltraumverwitterung weniger ausgesetzt ist, wurde am 5. April 2019 ein größeres Projektil abgefeuert.[15] Der Small Carry-on Impactor (SCI) besteht aus einem Kupferprojektil von 2,5 kg Masse, das aus einer Höhe von etwa 500 Metern mit einer Hohlladung von 4,5 kg plastifiziertem Oktogen auf Ryugu abgefeuert wurde. Die Sonde entließ dabei eine Kamera, DCAM3, die die Stelle des Impakts beobachtete, während sie selbst zur gegenüberliegenden Seite des Asteroiden flog, um nicht von herausgesprengtem Material getroffen zu werden. In den folgenden Wochen flog die Sonde zum etwa 2 Meter großen Impaktkrater und entnahm freigelegtes Material mit einem Greifarm.
Nach dem Abschluss der Mission blieben die Lander und Rover auf dem Asteroiden zurück. Die Raumsonde hingegen kehrte mit den Bodenproben zur Erde zurück.[16][17][18][19]
Ankunft beim Asteroiden
Die Sonde konnte Ryugu zum ersten Mal am 26. Februar 2018 mit Hilfe der Kamera ONC-T aus ungefähr 1,3 Millionen Kilometern Entfernung erfassen.[20] Am 27. Juni 2018 wurde die Annäherung an den Asteroiden auf 20 km gemeldet. Die Sonde machte Messungen und suchte nach einem geeigneten Landeplatz für den Lander.[21] Um die Gravitation zu testen, näherte sich die Sonde dem Asteroiden bis zum 6. August auf eine Entfernung von 850 Metern.[22]
Der Astrophysiker und Musiker Brian May erstellte eine 3-D-Aufnahme des Asteroiden aus zwei verschiedenen Aufnahmen vom 25. Juni 2018.[23]
Einsatz der Rover und Lander
Wie die JAXA am 22. September 2018 bekanntgab, konnten die beiden MINERVA-II-Roboter Rover-1A und Rover-1B erfolgreich auf der Oberfläche abgesetzt werden. Dazu näherte sich Hayabusa 2 der Oberfläche des Asteroiden bis auf eine Distanz von 55 Metern und entfernte sich dann wieder auf eine Position in etwa 20 Kilometern Höhe. Ryugu war zu diesem Zeitpunkt rund 280 Millionen Kilometer von der Erde entfernt. Die Rover dienten der Vorbereitung der Landung von MASCOT mittels fotografischer Aufnahmen und Temperaturmessungen.[24][25] Beide Landungen glückten und die Rover konnten erfolgreich Bilder und andere Daten übertragen.[14]
Zwölf Tage darauf wurde MASCOT aus einer Höhe von 51 Metern zum Asteroiden Ryugu entlassen, setzte etwa 20 Minuten später auf[26] und unternahm seine rund 17-stündige Operation, während der er drei Sprungbewegungen ausführte. Auch MASCOT sendete Bilder und Daten.[27]
Der vierte Rover, MINERVA-II 2, sollte Ende September 2019 landen. Bei der Separation ging die Kontrolle über den Rover verloren und er zerschellte Anfang Oktober auf dem Asteroiden, nachdem im Anflug noch Experimente ausgeführt wurden.
Rückkehr der Probenkapsel zur Erde
Am 13. November 2019 verließ die Sonde ihre Umlaufbahn um den Asteroiden und begann ihren Rückflug zur Erde. Wenige Stunden bevor Hayabusa 2 an der Erde vorbeiflog, trennte sie am 5. Dezember 2020 um 05:30 UTC ihre Probenkapsel ab. Die Kapsel trat mit 12 km/s in die Erdatmosphäre ein. Sie löste in etwa 10 km Höhe einen Fallschirm aus, der die Ortung der Kapsel per Radar erlaubt, und begann ein Positionssignal zu senden. Die Probenkapsel landete planmäßig in der Woomera Test Range in Australien.
Die Proben sollen im Extraterrestrial Sample Curation Center der JAXA analysiert werden.
Extended Mission
Im Rahmen einer Extended Mission soll Hayabusa 2 zwei weitere Asteroiden erforschen. Im Juli 2027 soll die Sonde am Asteroiden 2001 CC21 vorbeifliegen. Danach soll sie zwei Swing-by-Manöver an der Erde ausführen, um im Juli 2031 den erdnahen Asteroiden 1998 KY26 zu erreichen.[28]
Weiterführende Literatur
- 小惑星探査機「はやぶさ2 Asteroid Explorer Hayabusa2 (japanisch/englisch) (PDF; 5,7 MB).
- Planetary Protection of Hayabusa-2 Mission, a Sample Return from 1999 JU3, C-type NEO. (Memento vom 5. März 2016 im Internet Archive). (PDF; 13,4 MB), NASA Planetary Protection Subcommittee 2012.
Weblinks
- Website zur Hayabusa-2-Mission (englisch)
- Link zur Teilnahme (englisch)
- Podcast Raumzeit zur Mission Hayabusa 2 und der Lander MASCOT, 7. Februar 2020
- Raumsonde erzeugt künstlichen Krater auf Asteroid
Einzelnachweise
- Japanese H-IIA kicks off Hayabusa 2’s asteroid mission. In: nasaspaceflight.com. 3. Dezember 2014, abgerufen am 3. Dezember 2014 (englisch).
- Twitter-Nachricht von HAYABUSA2@JAXA, 2. Oktober 2019.
- Takashi Kamiguri, Asahi Shimbun: Engineers seek smoother space journey for Hayabusa 2. 9. Juni 2012.
- Planetary Protection of Hayabusa-2 Mission, a Sample Return from 1999 JU3, C-type NEO. (Memento vom 5. März 2016 im Internet Archive). (PDF; 13,4 MB), NASA Planetary Protection Subcommittee 2012.
- Asteroid Explorer “Hayabusa2”. Name and Message Campaign. Let’s meet with Le Petit Prince! Million Campaign 2. In: jaxa.jp. 29. März 2013, abgerufen am 3. Oktober 2018.
- Stefan Deiters: Hayabusa 2. Namen sollen zu Asteroid 1999 JU3 mitreisen. In: astronews.com. 25. April 2013, abgerufen am 16. August 2013.
- Keiji Tachikawa – The President’s New Year Interview, 2007. In: jaxa.jp. Abgerufen am 24. September 2018.
- Asteroid probe, rocket get nod from Japanese panel. In: SpaceflightNow.com. 11. August 2010, abgerufen am 24. September 2018.
- Wendy Zukerman: Hayabusa2 will seek the origins of life in space. In: NewScientist.com. 18. August 2010, abgerufen am 24. September 2018.
- Paul Rincon: Hayabusa-2: Japan’s rovers ready for touchdown on asteroid. In: BBC.com. 20. September 2018, abgerufen am 3. Oktober 2018.
- DLR: Three hops in three asteroid days – MASCOT successfully completes the exploration of the surface of asteroid Ryugu. In: DLR Portal. 5. Oktober 2018 (dlr.de).
- Touchdown! Japan’s Hayabusa2 spacecraft releases MASCOT lander on asteroid Ryugu. In: firstpost.com. Tech2, 3. Oktober 2018, abgerufen am 3. Oktober 2018 (amerikanisches Englisch).
- Japan’s next asteroid probe approved for development. In: SpaceflightNow.com. 29. Januar 2012, abgerufen am 24. September 2018.
- Hayabusa-2: Japan’s rovers send pictures from asteroid. In: BBC.com. 22. September 2018, abgerufen am 3. Oktober 2018.
- Japan’s Hayabusa 2 probe releases ‘bomb’ at asteroid. In: spaceflightnow.com. 5. April 2019, abgerufen am 6. April 2019 (englisch).
- Hüpfendes Messgerät nimmt erstmals Bodenproben auf einem Asteroiden. In: ingenieur.de. 19. Juni 2013, abgerufen am 16. August 2013.
- Tra-Mi Ho (Projektleiterin): MASCOT: Asteroidenlander mit Orientierungssinn. In: DLR.de. 1. Oktober 2012, abgerufen am 18. August 2018.
- Takanao Saiki, Hirotaka Sawada, Chisato Okamoto, Hajime Yano, Yasuhiko Takagi, Yasuhiro Akahoshi, Makoto Yoshikawa: Small carry-on impactor of Hayabusa2 mission. In: Acta Astronautica. Band 84, März 2013, ISSN 0094-5765, S. 227–236, doi:10.1016/j.actaastro.2012.11.010 (online).
- Hayabusa2 has detected Ryugu. In: JAXA.de. Japan Aerospace Exploration Agency, 1. März 2018, abgerufen am 22. September 2018.
- „Hayabusa-2“ erreicht ihr Ziel. In: ORF.at. 27. Juni 2018, abgerufen am 27. Juni 2018.
- Hayabusa 2 probe gets a closer look at asteroid amid landing preps. In: spaceflightnow.com. 15. August 2018, abgerufen am 17. August 2018.
- Stereo image of asteroid Ryugu by Dr Brian May. In: hayabusa2.jaxa.jp. 4. Juli 2018, abgerufen am 22. September 2018.
- Zwei japanische Kleinroboter landen auf Asteroid Ryugu. In: derStandard.at. 22. September 2018, abgerufen am 22. September 2018.
- Raumsonde setzt zwei Roboter auf Asteroiden ab. In: Spiegel.de. 22. September 2018, abgerufen am 22. September 2018.
- Christoph Seidler: Asteroidenmission „Mascot“. Der Schuhkarton ist gelandet. Spiegel Online, 3. Oktober 2018.
- DLR: Three hops in three asteroid days – MASCOT successfully completes the exploration of the surface of asteroid Ryugu. In: DLR Portal. 5. Oktober 2018 (dlr.de).
- Asteroid explorer, Hayabusa2, reporter briefing, September 15, 2020, JAXA Hayabusa2 Project

Gestartete Missionen: ISEE-3/ICE (1978) | Vega (1984) | Sakigake (1985) | Giotto (1985) | Suisei (1985) | Galileo (1989) | Clementine (1994) | NEAR (1996) | Deep Space 1 (1998) | Stardust (1999) | Contour (2002) | Hayabusa (2003) | Rosetta (2004) | Deep Impact (2005) | New Horizons (2006) | Dawn (2007) | Chang’e 2 (2010) | Hayabusa 2 (2014) | Osiris-Rex (2016) | Lucy (2021) | DART (2021)
Geplante Missionen: Near-Earth Asteroid Scout (2022) | Psyche (2022) | Janus (2022) | Destiny Plus (2024) | Hera (2024) | Comet Interceptor (2029)
Gestrichene Missionen: NEAP | Don Quijote | New Asteroid Initiative
Überblick: Chronologie der Raumsonden zu Kometen und Asteroiden