Betragsoptimum
Beim Betragsoptimum handelt es sich um einen Begriff aus der Regelungstheorie, genauer um ein regelungstechnisches Optimierungskriterium im Frequenzraum.[1] Eine Regelung wird allgemein dann als optimal bezeichnet, wenn die Regelgröße dem Wert der Führungsgröße mit möglichst geringer zeitlicher Verzögerung folgen kann. Bei der Optimierung mittels des Betragsoptimums wird die Einschwingzeit eines Regelsystems optimiert.[2]
Ein weiteres Optimierungskriterium im Frequenzbereich ist das symmetrische Optimum.
Motivation



Eine kurze Anstiegszeit bzw. Anregelzeit wie bei der Sprungantwort bedingt eine große Bandbreite des geschlossenen Regelkreises. Es ist ein direkter Bezug zwischen der Anstiegszeit TAn und der Bandbreite der Führungsübergangsfunktion gegeben. Mathematisch gesehen ist der Bezug wie folgt:[3]

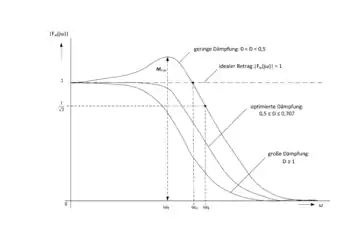
Für gutes Führungsverhalten wird beim Betragsoptimum das Verhältnis der Ausgangs- zur Eingangsamplitude (Amplituden-Frequenzgang) optimiert. Im Idealfall ist der Betrag des Frequenzganges F für alle Kreisfrequenzen ω:[4]
- .

Es wird auch von einer Betragsanschmiegung von Fw(jω) an Eins gesprochen.[3] In realen Regelkreisen treten allerdings immer Verzögerungen auf, weshalb dieses ideale Betragsoptimum nur in Näherung erreicht werden kann und es bei höheren Frequenzen zu einer Verkleinerung des Amplituden-Frequenzganges kommt. Das Optimierungsverfahren des Betragsoptimums versucht über einen möglichst großen Frequenzbereich von ω den Betrag des Frequenzgangs auf oder Nahe dem Wert 1 zu halten, dazu werden die Parameter des Reglers aus den Zeitkonstanten der Regelstrecke berechnet.[5]
Voraussetzungen zur Anwendung des Betragsoptimums
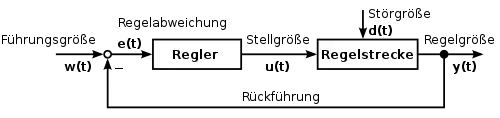
Zur Anwendung des Betragsoptimum werden gewisse Voraussetzungen gestellt, diese gilt es einzuhalten. Werden die Voraussetzungen nicht eingehalten kann es zu undefinierten Zuständen kommen. Zum Beispiel könnte die Stellgrößenbegrenzung überschritten werden. Eine Folge könnte sein, dass das System eine unerwartete Reaktion herbeiführt, wie die Zerstörung elektrischer Bestandteile. So wird davon ausgegangen, dass bei dem Reglerentwurf die Messeinrichtung zu der Regelstrecke gezählt wird und somit ein Standardregelkreis vorliegt. Die Parameter der Regelstrecke, Zeitkonstanten und Verstärkungsfaktor, müssen bereits bekannt sein.[6] Des Weiteren wird bei der Herleitung, als auch bei den Einstellregeln für das Betragsoptimum, davon ausgegangen, dass es sich bei der Regelstrecke um eine Zusammensetzung aus Verzögerungssystemen handelt. Bei nichtreellen Streckenpolen besteht die Gefahr von Stabilitätsschwierigkeiten. Wenn konjugiert komplexe Pole in der Regelstrecke vorhanden sind, sollten diese hinreichend gedämpft sein. Jedoch wäre die Verwendung von rein reellen Polen vorzuziehen.[5] Eine nicht schwingfähige Regelungsstrecke mit Ausgleich ist somit vorauszusetzen. Bei Verwendung von dominanten Zeitkonstanten, d. h. eine oder zwei große Zeitkonstanten gegenüber der Ersatzzeitkonstante TE, sind besonders brauchbare Resultate zu erwarten. Werden die Voraussetzungen eingehalten so ist ein gutes Führungsverhalten garantiert.[7]
Mathematischer Hintergrund
Das Verfahren wurde für einen Regelkreis II. Ordnung abgeleitet. Zudem wird bei der Herleitung in zwei Typen unterschieden: Anwendung des Betragsoptimums für Regelstrecken I. Ordnung und Anwendung des Betragsoptimums für Regelstrecken höherer Ordnung. Es existieren Hilfssätze um die Regelstrecke zu vereinfachen, diese werden angewendet bei Strecken höherer Ordnung und Totzeitelementen.[2]
Satz von der Summe aller kleinen Zeitkonstanten
Liegt eine Regelstrecke höherer Ordnung vor, welche folgende Form aufweist:
,
so kann eine Ersatzzeitkonstante TE, welche sich aus der Summe aller kleinen Zeitkonstanten zusammensetzt, gebildet werden. Hierbei wird unterschieden, ob es eine oder zwei dominante Zeitkonstanten gibt. Dies wird auch als Satz von der Summe aller kleinen Zeitkonstanten bezeichnet.[2]

Im Fall einer dominanten Zeitkonstante gilt[5]:

Im Fall von zwei dominanten Zeitkonstanten gilt[7]:

Vereinfachung von Totzeitelementen
Sei eine Totzeit Tt deutlich kleiner als die Zeitkonstante T1 eines Verzögerungssystems, das gleiche wäre gültig bei einem I-Glied und dessen Integrationszeit TI, so kann diese als PT1-Glied ersetzt werden. Bei dieser Überlegung wird von dem offenen Regelkreis G0(s) ausgegangen. "Dabei wird die Reihenentwicklung der Exponential-Funktion für das Totzeitelement nach dem ersten Glied abgebrochen:"[2]
, wenn gilt.


Anwendung des Betragsoptimums für Regelstrecken Ι. Ordnung
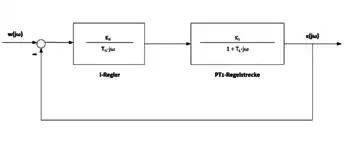

Nachfolgend wird die Herleitung für die Anwendung des Betragsoptimums für Regelstrecken I. Ordnung beschrieben, diese baut auf dem Sachverhalt des Abschnittes Motivation auf. Ein Regelkreis II. Ordnung, zusammengesetzt aus einem I-Regler und einer PT1-Regelstrecke, besitzt folgende Frequenzgangfunktion als offener Regelkreis:[2]
, mit .


Nun wird mittels des offenen Regelkreises der geschlossene Regelkreis gebildet, der folgende Frequenzgangfunktion aufweist:

Da der Betrag für einen möglichst großen Bereich gleich 1 sein soll, gilt (es wird das Betragsquadrat verwendet, um die Wurzel im Nenner zu beseitigen):


Damit die Approximation für einen großen Bereich gültig ist, müssen möglichst viele Koeffizienten des Zähler- und Nennerpolynoms gleich sein. Somit folgt diese Gleichung:

Aus der Gleichung kann eine Realisierungstabelle für den Koeffizientenvergleich abgeleitet werden:
| Zählerpolynom | Nennerpolynom | Realisierung |
|---|---|---|
| ist erfüllt | ||
| realisierbar | ||
| nicht realisierbar |





Somit ergibt sich folgende Optimierungsgleichung:
, es gilt .



Setzt man nun die Integrierkonstante TI in die Frequenzgangfunktion des geschlossenen Regelkreises ein, so ergibt sich:

Geht man nun in den Laplace-Bereich und stellt die Übertragungsfunktion des geschlossenen Regelkreises G(s) auf, kann man diese mit einem standardisierten PT2-Glied abgleichen.

Durch einen Koeffizientenvergleich lassen sich die Dämpfung D und die Kennkreisfrequenz ermitteln.

, es gilt .



, somit gilt eine feste Dämpfung für alle Frequenzen.

Anwendung des Betragsoptimums für Regelstrecken höherer Ordnung
Die Herleitung zur Anwendung des Betragsoptimums für Regelstrecken höherer Ordnung baut zum einen auf den Sachverhalt des Abschnittes Motivation, als auf die ermittelte optimale Einstellung für TI aus dem Abschnitt Anwendung des Betragsoptimums für Regelstrecken Ι.Ordnung auf. Darüber hinaus wird die Herleitung unterteilt in die Kompensation einer großen Zeitkonstante und in die Kompensation von zwei großen Zeitkonstanten.
Kompensation einer großen Zeitkonstante
Ist eine Zeitkonstante der Regelstrecke deutlich größer als die Anderen, so kann die Nachstellzeit TN eines PI-Reglers genutzt werden um die große Zeitkonstante T1 zu kompensieren. Vorteil dieser Kompensation ist, dass die Schnelligkeit der Regelung verbessert und die mathematische Rechnung vereinfacht wird. Die mathematische Rechnung wird deshalb vereinfacht, da die Kompensation einer Kürzung gleicht. Mit dem Satz von der Summe aller kleinen Zeitkonstanten werden die kleinen Zeitkonstanten der Regelstrecke zur Ersatzzeitkonstante TE zusammengefasst.[2]
Vorausgesetzt wird ein PI-Regler und eine PT2-Strecke bzw. PTn-Strecke. Bei einer PT2-Strecke bildet sich folgende Übertragungsfunktion für den offenen Regelkreis:
, es gilt .


Wenn die Nachstellzeit TN nun gleich der großen Verzögerungszeitkonstante T1 gewählt wird ergibt sich eine Kürzung. Somit entsteht die Optimierungsvorschrift .


Auf Grundlage des Abschnittes Anwendung des Betragsoptimums für Regelstrecken Ι.Ordnung folgt unter Verwendung der optimalen Einstellung für TI die Optimierungsvorschrift für KR.

Kompensation von zwei großen Zeitkonstanten
Für die Kompensation von zwei großen Zeitkonstanten werden die kleinen Zeitkonstanten wie schon im Abschnitt Anwendung des Betragsoptimums für Regelstrecken höherer Ordnung zu der Ersatzzeitkonstante TE zusammengefasst. Des Weiteren wird ein PID-Regler eingesetzt, um mit Hilfe der Nachstellzeit TN und der Vorhaltzeit TV des Reglers die zwei großen Zeitkonstanten der Regelstrecke zu kompensieren. Vorteil dieser Kompensation ist, dass die Schnelligkeit der Regelung verbessert und die mathematische Rechnung vereinfacht wird. Die mathematische Rechnung wird deshalb vereinfacht, da die Kompensation einer Kürzung gleicht.[2]
Es ergibt sich folgende Übertragungsfunktion für den offenen Regelkreis, beim Einsatz eines PID-Reglers und einer PT3-Regelstrecke:
, es gilt .


Bei der Kompensation von zwei großen Zeitkonstanten ergibt sich die nachfolgende Reglereinstellung:
für .


Nach der Kompensation ergibt sich dieselbe Übertragungsfunktion wie schon im Abschnitt Anwendung des Betragsoptimums für Regelstrecken höherer Ordnung:
Die Optimierungsvorschrift für den Reglerverstärkungsfaktor KR ist somit dieselbe wie bei dem Einsatz eines PI-Reglers und einer PT2-Strecke:

Einstellregeln für das Betragsoptimum
In der nachfolgenden Tabelle sind die Strecken- und Reglerstrukturen, inklusive der Angabe des Übertragungsverhaltens, dargestellt. Zudem sind die jeweiligen Einstellregeln für das Betragsoptimum hinzugefügt. Die Einstellregeln gelten nur, wenn die Voraussetzungen erfüllt sind.[2]
| Regelstrecke | Regler | ||
|---|---|---|---|
| Typ | Übertragungsfunktion | Typ | Übertragungsfunktion |
| PT1 |
|
I |
|
| PT2 |
|
PI |
|
| PTn |
|
PI |
|
| PTn |
|
PID |
|














Betragsoptimum im Vergleich
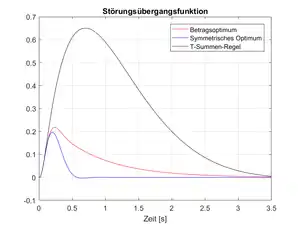
Um die Stärken des Betragsoptimums zu verdeutlichen, wird nachfolgend ein Vergleich mit mehreren Verfahren vorgeführt. Dabei steht die Regelung einer PT3-Strecke mit einem PI-Regler im Fokus. Zum Vergleich wird eine empirische Einstellregel aus dem Zeitbereich, sowie ein weiteres Optimierungskriterium aus dem Frequenzbereich herangezogen. Aus dem Spektrum der empirischen Einstellregeln wird die schnelle Regelung nach der T-Summen-Regel genommen. Aus den Optimierungskriterien im Frequenzbereich wird das Symmetrische Optimum gewählt.[3][4][6][8]
Gegeben sei folgende Regelstrecke:

mit den Streckenparametern:

Der PI-Regler soll wie folgt aussehen:
- Einstellung der Regelparameter nach dem Betragsoptimum (s. Tabelle, 3 Zeile):
, da gültig ist.





- Einstellung der Regelparameter nach dem Symmetrischen Optimum (es sei ):
IT1-Näherung:






- Einstellung der Regelparameter nach der T-Summen-Regel (schnelle Regelung):




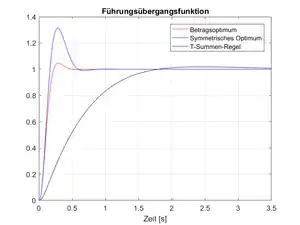
Anhand der Führungsübergangsfunktion lässt sich erkennen, dass das Betragsoptimum eine deutlich geringere An- und Ausregelzeit aufweist gegenüber der empirischen Einstellregel. Dies ist auf den Größenunterschied des Regler-Verstärkungsfaktors KR zurückzuführen, dieser ist bei der T-Summen-Regel deutlich kleiner. Des Weiteren ist der Überschwinger des Betragsoptimums wesentlich niedriger, als der des Symmetrischen Optimums. Der Grund ist die Nachstellzeit TN, diese ist zwar geringer beim Symmetrischen Optimum und führt deshalb nochmal zu einer etwas besseren Anregelzeit. Der zu zahlende Preis ist jedoch ein größerer Überschwinger und eine erhöhte Ausregelzeit.
Anwendungsbereiche
Das Betragsoptimum ist wegen seiner Stärken in der Praxis unumstritten[9] und wird vorzugsweise im Bereich der elektrischen Regelung eingesetzt.[5] Darüber hinaus ist ein weiterer Einsatzschwerpunkt des Verfahrens der Einsatz in der Antriebstechnik.[6],[10]
Das Betragsoptimum wird häufig für die Einstellung von
- Geschwindigkeits-,
- Strom-,
- Drehmoment- und
- Kraftregelungen
eingesetzt. Dabei erstrecken sich die Einsatzgebiete von
- Hauptantriebe von Werkzeugmaschinen,
- Vorschubantriebe von Werkzeugmaschinen und Industrierobotern
- bis hin zu Aufzügen.[2]
Literatur
- Slobodan N. Vukosavić: Digital Control of Electrical Drives. Springer-Verlag, New York 2007, ISBN 978-0-387-48598-0.
- Dierk Schröder: Elektrische Antriebe – Regelung von Antriebssystemen. Springer-Verlag, Berlin, Heidelberg 2015, ISBN 978-3-642-30471-2.
- Gert-Helge Geitner: Entwurf digitaler Regler für elektrische Antriebe. VDE-Verlag, Berlin, Offenbach 1996, ISBN 3-8007-1847-2.
Weblinks
Einzelnachweise
- Ekbert Hering, Heinrich Steinhart: Taschenbuch der Mechatronik. Hanser Verlag, Leipzig 2005, ISBN 978-3-446-22881-8, S. 100.
- Holger Lutz, Wolfgang Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink. 12. Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2021, ISBN 978-3-8085-5870-6, S. 504–515.
- Gerd Schulz: Regelungstechnik: Grundlagen, Analyse und Entwurf von Regelkreisen, rechnergestützte Methoden. Springer, Berlin 1995, ISBN 3-540-59326-8, S. 151–154.
- Manfred Reuter, Serge Zacher: Regelungstechnik für Ingenieure: Analyse, Simulation und Entwurf von Regelkreisen. 10. Auflage. Vieweg, Braunschweig 2002, ISBN 3-528-94004-2, S. 236–237.
- Otto Föllinger, Ulrich Konigorski (Bearb.): Regelungstechnik: Einführung in die Methoden und ihre Anwendung. 11. Auflage. VDE-Verlag, Berlin 2013, ISBN 978-3-8007-3231-9, S. 201–203.
- Thomas Beier, Petra Wurl: Regelungstechnik: Basiswissen, Grundlagen, Beispiele. 2. Auflage. Fachbuchverlag Leipzig, München 2015, ISBN 978-3-446-44210-8, S. 177–185.
- Jörg Kahlert: Crashkurs Regelungstechnik: Eine praxisorientierte Einführung mit Begleitsoftware. 2. Auflage. VDE-Verlag, Berlin 2015, ISBN 978-3-8007-3642-3, S. 150–153.
- A. Weigl-Seitz: Regelungstechnik. Darmstadt 2015, S. 23–35.
- Hans-Werner Philippsen: Einstieg in die Regelungstechnik: Vorgehensmodell für den praktischen Reglerentwurf. Fachbuchverlag Leipzig, München 2004, ISBN 3-446-22377-0, S. 141–143.
- Rolf Schönfeld: Regelungen und Steuerungen in der Elektrotechnik. Verlag Technik, Berlin, München 1993, ISBN 3-341-01027-0, S. 78–96, 151–154.