Apollonisches Problem
Das Apollonische Problem (Problem des Apollonios) ist eines der berühmtesten Probleme der antiken Geometrie. Es geht darum, mit Zirkel und Lineal die Kreise zu konstruieren, die drei beliebige vorgegebene Kreise berühren. Apollonios von Perge (* ca. 265 v. Chr.; † ca. 190 v. Chr.) widmet diesem Problem ein nicht erhaltenes Buch (Über Berührungen).

Da man bei den Ausgangskreisen auch von einem unendlich kleinen Radius und einem unendlich großen Radius ausgehen kann, kann nicht nur von drei Kreisen, sondern auch von Punkten und Geraden (Tangenten) ausgegangen werden. Insgesamt gibt es zehn Kombinationsmöglichkeiten für die gegebenen Stücke, die weiter unten aufgeführt sind.
Da die vollständige Lösung der Probleme alle Konstruktionsfälle mit Berührungen (Tangenten) von Kreisen, Punkten und Geraden löst, sind natürlich auch die Berührkreise am Dreieck enthalten (Ankreis, Inkreis, Umkreis).
Geschichte
Ein reiches Repertoire von geometrischen und algebraischen Methoden wurde entwickelt, um das apollonische Problem zu lösen, das als "das berühmteste aller geometrischen Probleme" bezeichnet wurde. Die originale Vorgehensweise von Apollonios ist verlorengegangen, aber von François Viète und anderen wurden Rekonstruktionen entwickelt, die auf Hinweisen in der Beschreibung durch Pappos basieren.[1] Die erste neue Lösungsmethode wurde 1596 von Adriaan van Roomen veröffentlicht, der die Mittelpunkte der Lösungskreise als die Schnittpunkte zweier Hyperbeln fand. Van Roomens Methode wurde 1687 durch Isaac Newton in seinen Principia und durch John Casey im Jahre 1881 verfeinert.
Trotz der erfolgreichen Lösung des Apollonius-Problems hat van Roomens Methode einen Nachteil. Eine geschätzte Eigenschaft in der klassischen euklidischen Geometrie ist die Möglichkeit, Probleme ausschließlich mit Zirkel und Lineal zu lösen. Viele Konstruktionen sind bei Beschränkung auf diese Hilfsmittel unmöglich, beispielsweise die Winkeldreiteilung. Viele dieser "unmöglichen" Probleme lassen sich jedoch durch Schnitt von Kurven wie Hyperbeln, Ellipsen und Parabeln (Kegelschnitte) lösen. So kann die Würfelverdoppelung (das Problem, einen Würfel mit dem doppelten Volumen eines gegebenen Würfels zu konstruieren) nicht mit Zirkel und Lineal gelöst werden, aber Menaichmus zeigte, dass durch Schnitt zweier Parabeln die Lösung gefunden werden kann. Daher ließ sich aufgrund der Lösung durch van Roomen – die auf dem Schnitt zweier Hyperbeln beruhte – nicht entscheiden, ob eine Konstruktion mit Zirkel und Lineal möglich ist.
Van Roomens Freund François Viète, der ursprünglich van Roomen dazu gebracht hatte, sich mit dem apollonischen Problem zu befassen, entwickelte eine Methode, die nur Zirkel und Lineal verwendete. Vor Erscheinen der Lösung von Viète zweifelte Regiomontanus an der Möglichkeit einer Konstruktion mit Zirkel und Lineal. Viète löste zuerst einige einfache Spezialfälle des Apollonios-Problems, etwa die Bestimmung eines Kreises durch drei gegebene Punkte, das nur eine Lösung hat, wenn die Punkte verschieden sind. Darauf aufbauend, löste er kompliziertere Spezialfälle, in einigen Fällen durch Verkleinern oder Vergrößern der gegebenen Kreise.[2] Gemäß dem Bericht von Pappos von Alexandria im 4. Jahrhundert folgte das originale Werk von Apollonios zu diesem Problem — mit dem Titel Ἐπαφαί (Epaphaí, "Berührungen"; Lateinisch: De tactionibus, De contactibus) — einem ähnlichen fortschreitenden Zugang. Daher wird Viètes Lösung als plausible Rekonstruktion der Lösung von Apollonios betrachtet, auch wenn weitere Rekonstruktionen unabhängig von drei verschiedenen Autoren publiziert wurden.
Verschiedene andere geometrische Lösungen des Apollonios-Problems wurden im 19. Jahrhundert entwickelt. Die bemerkenswertesten Lösungen sind die von Jean-Victor Poncelet (1811) und von Joseph Diaz Gergonne (1814). Während der Beweis von Poncelet auf Ähnlichkeitszentren von Kreisen und der Potenz eines Punktes beruht, nutzt die Methode von Gergonne die konjugierte Relation zwischen Geraden und ihren Polen in einem Kreis aus. Methoden, welche die Kreisspiegelung verwenden, wurden durch Julius Peter Christian Petersen im Jahre 1879 eingeführt; ein Beispiel ist die Ring-Lösungsmethode von H. S. M. Coxeter.[3] Einen weiteren Zugang liefert die Lie-Geometrie von Sophus Lie.
Algebraische Lösungen des apollonischen Problems wurden im 17. Jahrhundert von René Descartes und Prinzessin Elisabeth von Böhmen gefunden, die allerdings ziemlich kompliziert sind. Praktisch verwendbare algebraische Methoden wurden im späten 18. und im 19. Jahrhundert durch verschiedene Mathematiker entwickelt, darunter Leonhard Euler, Nikolaus Fuss, Carl Friedrich Gauß, Lazare Carnot, und Augustin Louis Cauchy.
Setzt man die Konstruktion zu kleineren sich berührenden Kreisen fort, wird man zu Apollonischen Kreispackungen geführt, die in den 2000er Jahren durch Verbindungen zu homogener Dynamik und Zahlentheorie Forschungsinteresse auf sich zogen (u. a. Jeffrey Lagarias, Allan Wilks, Peter Sarnak, Alex Kontorovich, Hee Oh). Sie sind außerdem Beispiele für Fraktale.
Lösungsmethoden
Schnitt von Hyperbeln
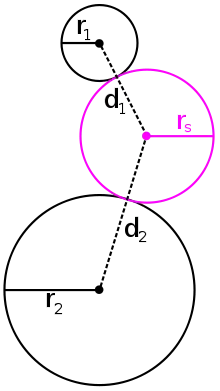
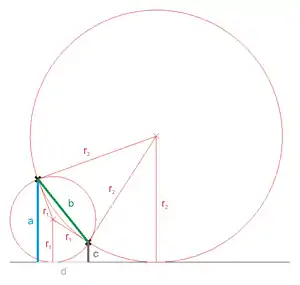
Die Lösung von Adriaan van Roomen (1596) basiert auf dem Schnitt zweier Hyperbeln. Die gegebenen Kreise seien mit C1, C2 und C3 bezeichnet. Van Roomen löste das allgemeine Problem durch Zurückführung auf ein einfacheres Problem, nämlich die Bestimmung von Kreisen, die zwei gegebene Kreise berühren, etwa C1 und C2. Er stellte fest, dass der Mittelpunkt eines Kreises, der die beiden gegebenen Kreise berührt, auf einer Hyperbel liegen muss, deren Brennpunkte die Mittelpunkte der gegebenen Kreise sind. Um das zu verstehen, sollen die Radien des Lösungskreises und der zwei gegebenen Kreise mit rs, r1 bzw. r2 bezeichnet werden (Abbildung 3). Der Abstand d1 zwischen den Mittelpunkten des Lösungskreises und von C1 ist entweder rs + r1 oder rs − r1 – je nachdem, ob diese Kreise ausschließend oder einschließend berührt werden. Entsprechend ist der Abstand d2 zwischen den Mittelpunkten des Lösungskreises und von C2 entweder gleich rs + r2 oder rs − r2 – wieder abhängig von der Art der Berührung. Daher ist die Differenz d1 − d2 dieser Abstände immer eine Konstante, die unabhängig von rs ist. Diese Eigenschaft einer festen Differenz der Abstände von zwei Brennpunkten charakterisiert Hyperbeln; folglich muss der Mittelpunkt des Lösungskreises auf einer Hyperbel liegen. Eine zweite Hyperbel kann gezeichnet werden für die beiden gegebenen Kreise C2 und C3, wobei die Art der Berührung zwischen dem Lösungskreis und C2 konsistent sein sollte zur ersten Hyperbel. Der Schnitt der beiden Hyperbeln (falls nicht leer) liefert den Mittelpunkt des Lösungskreises mit den vorgegebenen Berührungseigenschaften. Die gesamte Menge der Lösungen des apollonischen Problems findet man, indem man alle möglichen Kombinationen von ein- oder ausschließender Berührung der drei gegebenen Kreise betrachtet.
Isaac Newton (1687) verbesserte van Roomens Lösung dadurch, dass die Mittelpunkte der Lösungskreise durch Schnitt einer Geraden und eines Kreises ermittelt wurden. Newton formulierte das Apollonios-Problem als ein Problem der Trilateration: die Bestimmung eines Punktes Z aus drei gegebenen Punkten A, B und C, sodass die Differenzen der Abstände zwischen Z und den drei gegebenen Punkten bestimmte Werte haben. Diese vier Punkte entsprechen dem Mittelpunkt des Lösungskreises (Z) und den Mittelpunkten der drei gegebenen Kreise (A, B und C).
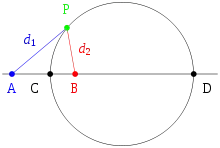
Anstelle der zwei Hyperbeln konstruiert Newton ihre Leitlinien. Für jede Hyperbel ist das Verhältnis der Abstände eines Punktes Z zu einem Brennpunkt A und der Leitlinie eine Konstante, die Exzentrizität genannt wird. Die zwei Leitlinien schneiden sich in einem Punkt T, und aus den beiden bekannten Abstandsverhältnissen konstruiert Newton eine Gerade durch T, auf der Z liegen muss. Das Abstandsverhältnis TZ/TA ist jedoch ebenfalls bekannt; daher liegt Z auch auf einem bekannten Kreis, da nach Apollonios ein Kreis definiert werden kann als die Menge aller Punkte, deren Abstände zu zwei gegebenen festen Punkten ein bestimmtes Verhältnis haben (Kreis des Apollonios). (Diese Definition ist übrigens die Grundlage der bipolaren Koordinaten.) Das Problem des Apollonios kann also auf den Schnitt von Gerade und Kreis zurückgeführt werden.
Viètes Rekonstruktion
Wie unten beschrieben, hat das apollonische Problem zehn Spezialfälle, die sich in der Art der drei gegebenen Objekte, nämlich Kreise (K), Geraden (G) oder Punkte (P) unterscheiden. Gewöhnlich werden diese zehn Fälle mit Abkürzungen wie KKP bezeichnet. Viète löste alle diese Fälle durch Konstruktionen mit Zirkel und Lineal; dabei verwendete er die Lösungen der einfacheren Fälle zur Behandlung der komplizierteren Fälle.[2]
Viète begann mit der Lösung des Falles PPP (drei Punkte) und folgte dabei der Methode von Euklid, wie sie in den Elementen beschrieben ist. Darauf aufbauend, leitete er ein Lemma ab, das dem Satz über die Potenz eines Punktes entspricht, und löste mit dessen Hilfe den Fall GPP (eine Gerade, zwei Punkte). Ebenfalls nach Euklid löste Viète den Fall GGG (drei Geraden) durch Verwendung von Winkelhalbierenden. Anschließend leitete er ein Lemma ab, um das Lot zu einer Winkelhalbierenden durch einen gegebenen Punkt zu konstruieren, womit der Fall GGP (zwei Geraden, ein Punkt) erledigt war. Damit waren die ersten vier Fälle des Apollonios-Problems gelöst, bei denen keine Kreise gegeben waren.
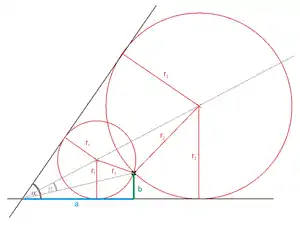
Um die verbleibenden Probleme zu lösen, nutzte Viète die Tatsache aus, dass die gegebenen Kreise und ein Lösungskreis ihre Größe ändern können, ohne dass sich an der Berührung etwas ändert (Abbildung 5). Wenn der Radius des Lösungskreises um einen Betrag verändert wird, muss sich der Radius der gegebenen Kreise bei einschließender Berührung ebenfalls um ändern, bei ausschließender Berührung dagegen um . Wenn also der Lösungskreis anschwillt, müssen die gegebenen Kreise bei einschließender Berührung genauso anschwellen und bei ausschließender Berührung sich entgegengesetzt verhalten, wenn die Berührungseigenschaft erhalten bleiben soll.


Viète verwendete diesen Zugang, um einen der gegebenen Kreise zu einem Punkt schrumpfen zu lassen; auf diese Weise ließen sich die komplizierteren Fälle auf die einfacheren, schon gelösten Fälle zurückführen. Er löste zuerst den Fall KGG (ein Kreis, zwei Geraden) durch Verkleinern des Kreises zu einem Punkt, entsprechend dem Fall GGP. Danach löste er den Fall KGP (ein Kreis, eine Gerade, ein Punkt) unter Verwendung von drei Lemmata. Erneut durch Schrumpfen eines Kreises zu einem Punkt, transformierte Viète den Fall KKG in den Fall KGP. Danach löste er die Fälle KPP (ein Kreis, zwei Punkte) und KKP (zwei Kreise, ein Punkt), den zweiten davon mit zwei Lemmata. Zuletzt löste Viète den allgemeinen Fall KKK (drei Kreise) durch Verkleinerung eines Kreises zu einem Punkt, wodurch dieses Teilproblem auf den Fall KKP zurückgeführt wurde.
Algebraische Lösung
Bezeichnet man die Mittelpunkte der drei gegebenen Kreise mit
- , und ,



deren Radien mit , und sowie Mittelpunkt und Radius des gesuchten Kreises mit und , so führen die Bedingungen für die Abstände des gesuchten Kreismittelpunkts von den gegebenen Mittelpunkten auf ein Gleichungssystem des folgenden Typs für die drei Unbekannten , und :










Bei ausschließender Berührung gilt das Pluszeichen von , bei einschließender Berührung das Minuszeichen. Subtrahiert man beispielsweise die zweite Gleichung von der ersten und die dritte von der zweiten, so kann man und durch ausdrücken, indem man ein lineares Gleichungssystem mit zwei Unbekannten löst.



Die Koeffizienten , , und hängen von den gegebenen Kreisen und der Art der Berührung (ein- oder ausschließend) ab.




Durch Einsetzen dieser Ergebnisse in eine der gegebenen Gleichungen erhält man eine quadratische Gleichung, mit der sich bestimmen lässt; daraus lassen sich anschließend die Koordinaten und errechnen.
Das hier beschriebene Verfahren bezieht sich zunächst auf den Fall dreier Kreise (KKK), lässt sich aber problemlos auf Punkte übertragen, wenn man diese als Kreise mit Radius 0 auffasst. Bei Geraden kann man aus der Bedingung, dass der Mittelpunkt eines Lösungskreises den Abstand haben muss, lineare Gleichungen für , und aufstellen; die weitere Lösung erfolgt wie bei Kreisen.

Inversive Methoden
Einen natürlichen Rahmen für das Problem des Apollonios bildet die Inversive Geometrie.[1] Die grundlegende Strategie der inversiven Methoden besteht darin, ein gegebenes Apollonios-Problem in ein anderes Apollonios-Problem zu verwandeln, das einfacher zu lösen ist; die Lösungen des originalen Problems erhält man aus den Lösungen des transformierten Problems dadurch, dass man die Transformation rückgängig macht. In Frage kommen Transformationen, die ein Apollonios-Problem in ein anderes verwandeln; sie müssen daher die gegebenen Punkte, Kreise und Geraden in andere Punkte, Kreise oder Geraden verwandeln, aber in keine anderen Formen. Die Kreisspiegelung hat diese Eigenschaft und erlaubt es, Mittelpunkt und Radius des Inversionskreises beliebig zu wählen. Zunächst könnte man meinen, dass auch Kongruenzabbildungen in Betracht kommen; diese würden aber das Problem nicht vereinfachen, sondern nur auf Verschiebungen, Drehungen und Spiegelungen des originalen Problems hinauslaufen.
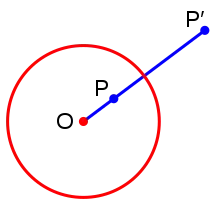
Die Inversion an einem Kreis (Kreisspiegelung) mit Mittelpunkt O und Radius R besteht aus der folgenden Operation (Abbildung 6): jeder Punkt P wird abgebildet auf einen neuen Punkt P′, so dass O, P und P′ kollinear sind und das Produkt der Abstände von P und P′ zum Mittelpunkt O gleich dem Quadrat des Radius R ist:

Liegt P außerhalb des Kreises, so liegt P′ innerhalb, und umgekehrt. Stimmt P mit O überein, so sagt man, dass die Inversion P ins Unendliche abbildet. (In der Komplexen Analysis wird "unendlich" auf der Riemannschen Zahlenkugel definiert.) Die Inversion hat die nützliche Eigenschaft, dass Geraden und Kreise immer in Geraden oder Kreise transformiert werden, und Punkte immer in Punkte. Kreise gehen bei der Inversion im Allgemeinen in Kreise über; wenn allerdings ein Kreis durch den Mittelpunkt des Inversionskreises geht, wird er in eine Gerade transformiert, und umgekehrt. Bedeutsam ist die Tatsache, dass ein Kreis, der den Inversionskreis rechtwinklig schneidet, durch die Inversion nicht verändert wird, sondern auf sich selbst abgebildet wird.
Die Kreisspiegelungen entsprechen einer Teilmenge der Möbiustransformationen auf der Riemannkugel. Das ebene Apollonios-Problem kann durch stereografische Projektion auf die Kugel übertragen werden; daher gelten die Lösungen des ebenen Problems auch für das entsprechende Problem auf der Kugel. Auch andere inversive Lösungen des ebenen Problems sind möglich.
Lösungspaare bezüglich Inversion
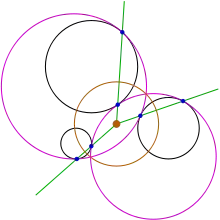
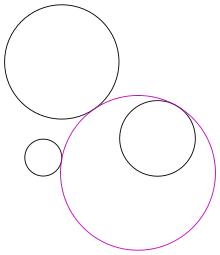
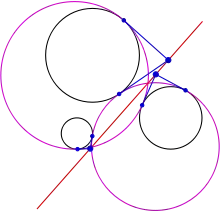
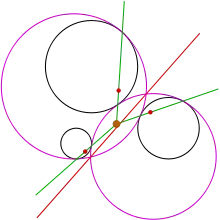
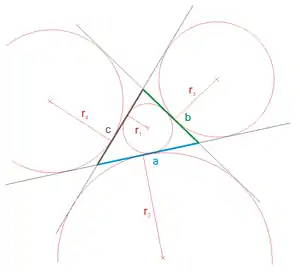
Lösungen des Apollonios-Problems treten gewöhnlich paarweise auf; zu jedem Lösungskreis gibt es einen konjugierten Lösungskreis (Abbildung 7).[2] Dabei schließt ein Lösungskreis die gegebenen Kreise aus, die der andere Lösungskreis einschließt, und umgekehrt. Im abgebildeten Beispiel schließt ein Lösungskreis (pink, links oben) zwei gegebene Kreise (schwarz) ein, den dritten gegebenen Kreis jedoch aus; der konjugierte Lösungskreis hingegen (ebenfalls pink, rechts unten) schließt den dritten gegebenen Kreis ein, die beiden anderen aber aus. Die beiden konjugierten Lösungskreise sind symmetrisch zueinander bezüglich einer Kreisspiegelung, wie im Folgenden erläutert wird.
Im Allgemeinen gibt es zu drei beliebigen Kreisen einen eindeutig bestimmten Kreis (engl. radical circle), der alle drei gegebenen Kreise rechtwinklig schneidet; der Mittelpunkt dieses Kreises wird englisch als radical center bezeichnet. Zur Veranschaulichung, der orange gezeichnete Kreis in Abbildung 7 schneidet die gegebenen, schwarz dargestellten Kreise im rechten Winkel. Die Kreisspiegelung am radical circle lässt die gegebenen Kreise unverändert, bildet aber die konjugierten Lösungskreise (pink) aufeinander ab. Dieselbe Kreisspiegelung bildet die entsprechenden Berührpunkte der zwei Lösungskreise aufeinander ab; zur Verdeutlichung, die beiden blau gekennzeichneten Punkte auf jeder der grünen Linien werden ineinander transformiert. Daher sind die Verbindungsgeraden solcher konjugierter Berührpunkte invariant bezüglich der Inversion; folglich müssen sie durch das Zentrum der Inversion gehen, also durch das radical center (grüne Linien, die sich im orangen Punkt der Skizze schneiden).
Inversion in einen Kreisring
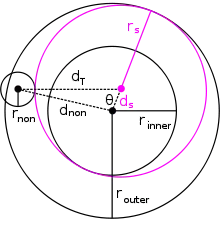
Falls zwei der drei gegebenen Kreise sich nicht schneiden, kann ein Inversionszentrum derart gefunden werden, dass diese zwei Kreise in konzentrische Kreise übergehen.[3][1] Bei Anwendung dieser Inversion werden die Lösungskreise auf Kreise innerhalb des Kreisrings zwischen den beiden konzentrischen Kreisen abgebildet. Daher gehören sie zu einer von zwei Familien mit je einem Parameter. In der ersten Familie (Abbildung 8) schließen die Lösungen nicht den inneren der konzentrischen Kreise ein, sondern liegen wie die Kugeln eines Kugellagers im Kreisring. In der zweiten Familie (Abbildung 9) wird der innere der konzentrischen Kreise eingeschlossen. Im Allgemeinen existieren vier Lösungen pro Familie, insgesamt also acht Lösungen, was im Einklang mit der algebraischen Lösung steht.
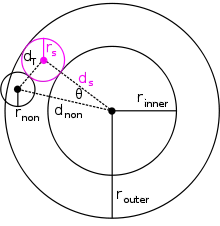
Sind zwei der gegebenen Kreise konzentrisch, so lässt sich das Apollonische Problem leicht mit einer von Gauß vorgeschlagenen Methode lösen. Die Radien der drei gegebenen Kreise sind bekannt, ebenso der Abstand dnon zwischen dem Mittelpunkt der konzentrischen Kreise und dem Mittelpunkt des nicht konzentrischen Kreises (Abbildung 8). Ein Lösungskreis kann bestimmt werden aus seinem Radius rs, dem Winkel sowie den Abständen ds und dT zwischen seinem Mittelpunkt und dem gemeinsamen Mittelpunkt der konzentrischen Kreise beziehungsweise dem Mittelpunkt des nicht konzentrischen Kreises. Der Radius und der Abstand ds sind bekannt (Abbildung 8), und für den Abstand dT gilt dT = rs ± rnon – abhängig davon, ob der nicht konzentrische Kreis einschließend oder ausschließend berührt wird. Aus dem Kosinussatz folgt nun


Hier wurde als Abkürzung eine neue Konstante C definiert, deren Index angibt, ob der Lösungskreis ausschließend oder einschließend berühren soll. Eine einfache trigonometrische Umformung führt zu den vier Lösungen

Diese Formel drückt vier Lösungen aus, weil je zwei Möglichkeiten für und C bestehen. Die verbleibenden vier Lösungen erhält man mit derselben Methode, indem man die Substitutionen für rs und ds aus Abbildung 9 verwendet. Insgesamt findet man mit dieser Methode alle acht Lösungen des allgemeinen Apollonios-Problems.
Zwei beliebige disjunkte Kreise können folgendermaßen auf konzentrische Kreise abgebildet werden. Zuerst konstruiert man die Potenzgerade der beiden gegebenen Kreise; wählt man zwei beliebige Punkte P und Q auf dieser Geraden, so kann man zwei Kreise mit den Mittelpunkten P beziehungsweise Q konstruieren, welche die zwei gegebenen Kreise rechtwinklig schneiden. Die beiden zuletzt konstruierten Kreise schneiden sich in zwei Punkten. Inversion an einem der beiden Schnittpunkte (F) bildet die konstruierten Kreise ab auf Geraden, die durch F gehen; die zwei gegebenen Kreise gehen dabei in konzentrische Kreise über, der dritte gegebene Kreis (im Allgemeinen) in einen neuen Kreis. Dies folgt daraus, dass das System der Kreise äquivalent ist zu einer Menge Apollonischer Kreise, die ein bipolares Koordinatensystem bilden.
Größenänderung und Inversion
Die Nützlichkeit der Kreisspiegelung kann durch Größenänderung deutlich gesteigert werden. Wie schon bei Viètes Rekonstruktion erläutert, lassen sich die Radien der gegebenen Kreise und des Lösungskreises zugleich ändern, sodass die Berührungseigenschaft erhalten bleibt. Auf diese Weise kann das ursprüngliche Apollonios-Problem in ein anderes Problem verwandelt werden, das unter Umständen leichter zu lösen ist. Beispielsweise kann die Größe von vier Kreisen so verändert werden, dass einer dieser Kreise zu einem Punkt schrumpft; auch ist es oft möglich, zwei gegebene Kreise so zu verändern, dass sie einander berühren. Drittens kann die Größe von Kreisen, die sich schneiden, so geändert werden, dass sie sich nicht schneiden; danach ist die Inversion in einen Kreisring anwendbar. In all diesen Fällen erhält man die Lösung des ursprünglichen Apollonios-Problems dadurch, dass man die Lösung des transformierten Problems nimmt und die Größenänderung und die Inversion rückgängig macht.
Schrumpfen eines gegebenen Kreises zu einem Punkt
Bei der ersten Vorgehensweise werden die gegebenen Kreise vergrößert oder verkleinert (entsprechend den Vorgaben zur Berührung), bis einer dieser Kreise zu einem Punkt P schrumpft. In diesem Fall wird das allgemeine Apollonios-Problem (KKK) zum Problem KKP (siehe Fallunterscheidung), also zu der Aufgabe, einen Kreis zu finden, der die beiden verbleibenden gegebenen Kreise berührt und durch den Punkt P geht. Inversion an einem Kreis mit Mittelpunkt P transformiert die zwei gegebenen Kreise in neue Kreise und den Lösungskreis in eine Gerade. Daher entspricht die transformierte Lösung einer Geraden, welche die beiden transformierten gegebenen Kreise berührt. Es gibt vier solche Lösungsgeraden, die sich mithilfe des äußeren und des inneren Ähnlichkeitszentrums der beiden Kreise konstruieren lassen. Erneute Inversion bezüglich P und Rückgängigmachen der Größenänderungen transformieren solch eine Lösungsgerade in den gewünschten Lösungskreis des originalen Apollonios-Problems. Man kann alle acht allgemeinen Lösungen durch Vergrößern und Verkleinern finden, entsprechend den Vorgaben zu ein- oder ausschließender Berührung; jedoch können verschiedene gegebene Kreise zu einem Punkt schrumpfen für verschiedene Lösungen.
Größenänderung zweier gegebener Kreise zur Berührung
Bei der zweiten Vorgehensweise werden die Radien der gegebenen Kreise um einen Betrag geändert, sodass sich zwei der Kreise berühren. Der gemeinsame Berührpunkt dient als Zentrum der Spiegelung an einem Kreis, der jeden der zwei sich berührenden Kreise in zwei Punkten schneidet. Durch die Kreisspiegelung werden die einander berührenden Kreise auf zwei parallele Geraden abgebildet: Da nämlich ihr einziger gemeinsamer Punkt ins Unendliche geht, können sich die Bildgeraden nicht schneiden. Dieselbe Inversion bildet den dritten Kreis auf einen anderen Kreis ab. Die Lösung des invertierten Problems muss also entweder (1) eine Gerade sein, die zu den gegebenen parallelen Geraden parallel ist und den aus dem dritten gegebenen Kreis entstandenen Kreis berührt, oder (2) ein Kreis mit konstantem Radius, der die gegebenen parallelen Geraden und den transformierten gegebenen Kreis berührt. Erneute Inversion und Änderung aller Kreisradien um liefert einen Lösungskreis, der die drei ursprünglich gegebenen Kreise berührt.
Gergonnes Lösung
Gergonnes Methode beruht darauf, dass Paare von Lösungskreisen betrachtet werden.[2] Es seien zwei Lösungskreise mit CA und CB bezeichnet (pink dargestellte Kreise in Abbildung 10); die Berührpunkte mit den drei gegebenen Kreisen seien A1, A2, A3 beziehungsweise B1, B2, B3. Gergonnes Lösungsmethode verfolgt das Ziel, diese sechs Punkte zu lokalisieren und so die zwei Lösungskreise zu finden.
Gergonne erkannte, dass, wenn eine Gerade L1 konstruiert werden kann, sodass A1 und B1 darauf liegen müssen, diese zwei Punkte durch Schnitt von L1 mit dem gegebenen Kreis C1 bestimmt werden können (Abbildung 10). Die anderen vier Berührpunkte lassen sich entsprechend ermitteln, indem man Geraden L2 und L3 findet, die durch A2 und B2 beziehungsweise durch A3 und B3 gehen. Um eine solche Gerade wie L1 zu konstruieren, müssen zwei Punkte identifiziert werden, die auf dieser Geraden liegen; aber diese Punkte müssen keine Berührpunkte sein. Gergonne gelang es, je zwei andere Punkte für diese Geraden zu finden. Von einem dieser beiden Punkte war schon die Rede, nämlich vom radical center G, das auf allen drei Geraden liegt (Abbildung 11).
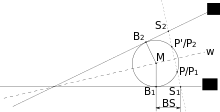
Um je einen zweiten Punkt auf den Geraden L1, L2 und L3 zu lokalisieren, verwendete Gergonne einen Zusammenhang zwischen diesen Geraden und der Potenzgerade R der Lösungskreise CA und CB. Um diesen Zusammenhang zu verstehen, sollen die beiden Tangenten an den Kreis C1 in den Berührpunkten mit den Lösungskreisen (A1 und B1) betrachtet werden; der Schnittpunkt dieser Tangenten ist der Pol von L1 in Bezug auf den Kreis C1. Da die Abstände dieses Pols zu den Berührpunkten A1 und B1 gleich sind, muss dieser Pol definitionsgemäß auch auf der Potenzgerade R der Lösungskreise liegen (Abbildung 10). Die Beziehung zwischen Polpunkten und ihren Polgeraden ist wechselseitig; wenn der Pol von L1 bezüglich C1 auf R liegt, muss umgekehrt der Pol von R bezüglich C1 auf L1 liegen. Daher können wir durch Konstruktion von R seinen Pol P1 bezüglich C1 finden; auf diese Weise erhält man den benötigten zweiten Bestimmungspunkt von L1 (Abbildung 11).
Gergonne fand die Potenzgerade R der unbekannten Lösungskreise folgendermaßen. Ein beliebiges Paar von Kreisen besitzt zwei Ähnlichkeitszentren; diese zwei Punkte ergeben sich als die Schnittpunkte der gemeinsamen Tangenten beider Kreise. Daher gibt es zu den drei gegebenen Kreisen sechs Ähnlichkeitszentren, je zwei für jedes Paar von Kreisen. Bemerkenswerterweise liegen diese sechs Punkte auf vier Geraden, und zwar jeweils drei Punkte auf jeder der Geraden; außerdem entspricht jede der Geraden der Potenzgerade eines potentiellen Paars von Lösungskreisen. Um dies zu zeigen, betrachtete Gergonne Geraden durch entsprechende Berührpunkte auf zwei der gegebenen Kreise, z. B. die Verbindungsgeraden A1A2 und B1B2. Nun sei X3 ein Ähnlichkeitszentrum für die zwei Kreise C1 und C2; dann sind A1, A2 und B1, B2 Paare von antihomologen Punkten, und ihre Verbindungsgeraden schneiden sich in X3. Daraus folgt, dass die Produkte der Abstände gleich sind:

Damit ist gezeigt, dass X3 auf der Potenzgerade der zwei Lösungskreise liegt. Ein entsprechendes Argument lässt sich auf die beiden anderen Paare von Kreisen anwenden, sodass die drei Ähnlichkeitszentren für die drei gegebenen Kreise auf den Potenzgeraden der Paare von Lösungskreisen liegen müssen.
Zusammengefasst ist die gesuchte Gerade L1 durch zwei Punkte definiert: das radical center G der drei gegebenen Kreise und den Pol von einer der vier Verbindungsgeraden der Ähnlichkeitszentren bezüglich C1. Bestimmung der entsprechenden Pole bezüglich C2 und C3 ergibt die Geraden L2 und L3; so können alle sechs Punkte lokalisiert werden, aus denen ein Paar von Lösungskreisen bestimmt werden kann. Wiederholt man diese Prozedur für die anderen drei Verbindungsgeraden von Ähnlichkeitszentren, so erhält man weitere sechs Lösungskreise, insgesamt also acht Lösungen. Wenn jedoch eine Gerade Lk keinen Schnittpunkt mit dem Kreis Ck besitzt (für dasselbe k), existiert kein Paar von Lösungskreisen für diese Verbindungsgerade von Ähnlichkeitszentren.
Spezialfälle
Fallunterscheidung
| Nummer | Kürzel | Gegeben | Zahl der Lösungen (im Allgemeinen) | Beispiel (gegebene Elemente schwarz; Lösung pink) | Anmerkungen |
|---|---|---|---|---|---|
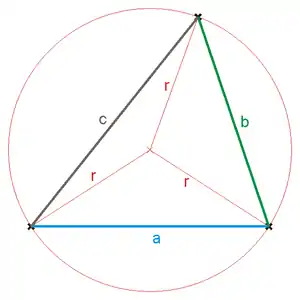
| 1 | PPP | drei Punkte | 1 | 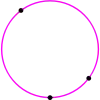 |
Der Lösungskreis ist im Allgemeinen der Umkreis des durch die Punkte festgelegten Dreiecks. Liegen die 3 Punkte auf einer Geraden, ist diese Gerade die (uneigentliche) Lösung, bzw. es gibt in diesem Falle keinen Kreis als Lösung. |
| 2 | GPP | eine Gerade, zwei Punkte | 2 | Ist die Gerade, die durch die beiden Punkte geht, parallel zur gegebenen Gerade, so existiert nur 1 Lösung. | |
| 3 | GGP | zwei Geraden, ein Punkt | 2 | 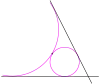 |
Die Verbindungslinie aus dem gegebenen Punkt und dem Schnittpunkt der beiden Geraden liegt in einem Fall innerhalb des Lösungskreises (siehe Bild), im anderen Falle außerhalb (der Lösungskreis wird dann i. d. R. deutlich größer). |
| 4 | GGG | drei Geraden | 4 | 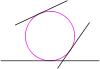 |
der Inkreis und die 3 Ankreise des aus den 3 Geraden gebildeten Dreiecks |
| 5 | KPP | ein Kreis, zwei Punkte | 2 | 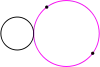 |
Der eine Lösungskreis liegt außerhalb des gegebenen Kreises (siehe Bild), der andere umschließt ihn. |
| 6 | KGP | ein Kreis, eine Gerade, ein Punkt | 4 | 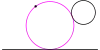 |
|
| 7 | KKP | zwei Kreise, ein Punkt | 4 | 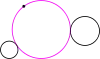 |
Die Lösungskreise umschließen entweder keinen (siehe Bild), den ersten, den zweiten oder beide Kreise |
| 8 | KGG | ein Kreis, zwei Geraden | 8 | 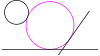 |
|
| 9 | KKG | zwei Kreise, eine Gerade | 8 | 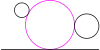 |
|
| 10 | KKK | drei Kreise (das klassische Problem) | 8 | 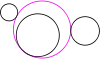 |
Das Problem ist in allen Fällen mit den klassischen Mitteln (Zirkel und Lineal) lösbar. Falls zwei der Kreise mindestens einen Punkt M gemein haben, kann man das Problem vereinfachen, indem man es durch eine Spiegelung an einem Kreis mit Mittelpunkt M auf den Fall zurückführt, dass zwei der Kreise in Geraden ausarten.
Für die vier Fälle ohne gegebene Kreise können mit relativ einfachen Möglichkeiten Lösungen für die Kreisradien angegeben werden:
Drei Punkte
Für drei Punkte gibt es eine Lösung. Wenn mindestens zwei Punkte aufeinander liegen, gibt es unendlich viele Lösungen.
Die drei Punkte bilden ein Dreieck mit den Seiten a, b, c. Der gesuchte Kreis ist der Umkreis dieses Dreiecks:

Für die Bestimmung des Flächeninhaltes A kann wieder der Satz des Heron verwendet werden.
Eine Gerade, zwei Punkte
Für zwei Punkte und eine Gerade gibt es zwei Lösungen, bei den unten genannten Spezialfällen nur eine, und für zwei auf der Geraden liegende Punkte keine Lösung.
Die vorgegebenen Punkte seien mit und bezeichnet, die vorgegebene Gerade mit . Weiter sei der Schnittpunkt der Geraden mit und der Schnittwinkel. Dann haben die Berührpunkte der beiden gesuchten Kreise nach dem Sekantentangentensatz den Abstand von . Die Mittelpunkte können dann als Schnittpunkte der Mittelsenkrechten von mit den Senkrechten zu in den Berührpunkten ermittelt werden.








Zwei Geraden, ein Punkt
Es gibt verschiedene Fälle:
- Die Geraden sind parallel: Falls der Punkt außerhalb des von den Geraden begrenzten Bereiches liegt, gibt es keine Lösungen. Liegt er auf einer der Geraden, gibt es eine Lösung. Liegt er dazwischen, zwei Lösungen; der Kreisdurchmesser ist jeweils gleich dem Abstand der Geraden.
- Die Geraden sind nicht parallel:
- Ist der Punkt der Schnittpunkt der Geraden, gibt es keine Lösung, sofern man die Lösung r=0 (Sonderfall des Kreises) ignoriert.
- Liegt der Punkt auf einer der Geraden, , ist jedoch nicht der Schnittpunkt, gibt es zwei Lösungen; die Mittelpunkte der Kreise sind die Schnittpunkte der beiden Winkelhalbierenden mit der Senkrechten zu durch .
- Liegt der Punkt auf keiner der Geraden, gibt es zwei Lösungen; dies ist der generische Fall. Es seien das Bild von unter der Spiegelung an der zugehörigen Winkelhalbierenden und der Schnittpunkt der Senkrechten zu durch und mit einer der Geraden, . Damit ist die Darstellung nun symmetrisch zur Winkelhalbierenden. Der Abstand der Berührpunkte (der beiden Kreise mit ) zu ergibt sich mit Hilfe der Beziehung des Sekanten-Tangenten-Satz, angewendet mit als Geraden-Zentrum zu . Aufgetragen nach beiden Seiten auf ergeben sich zunächst die Berührpunkte . Die Mittelpunkte der Kreise ergeben sich durch die jeweiligen Schnittpunkte der Senkrechten zu durch mit der Winkelhalbierenden .




Drei Geraden
Für drei sich schneidende Geraden (nicht parallel oder übereinander liegend) gibt es vier Lösungen. Sind zwei der Geraden parallel, gibt es nur zwei Lösungen, für drei Parallelen gibt es keine Lösung und für parallele Geraden mit Abstand 0 gibt es unendlich viele Lösungen.
Die drei Geraden bilden mit ihren Schnittpunkten ein Dreieck mit den Seiten . Deshalb kommen hier die Regeln für den Inkreis und die Ankreise zur Anwendung:


mit den Innenwinkeln , dem Flächeninhalt und dem halben Umfang :




Um einen Ausdruck zu erhalten, der nur die Seitenlängen verwendet, kann der Satz des Heron benutzt werden:

Die entsprechenden Formeln für die Ankreise lauten

bzw. für die anderen Ankreisen entsprechend.
Zahl der Lösungen
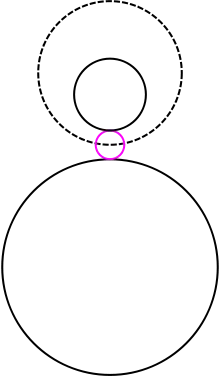
Das Problem, für die verschiedenen Typen des Apollonios-Problems die Anzahl der Lösungen zu ermitteln, gehört zum Gebiet der enumerativen Geometrie.[1] Die allgemeine Zahl von Lösungen für die zehn Problemvarianten ist in der Tabelle weiter oben angegeben. Es kommt jedoch vor, dass spezielle Anordnungen der gegebenen Elemente die Zahl der Lösungen ändern. Beispielsweise hat das Apollonische Problem keine Lösung, wenn einer der Kreise die beiden anderen trennt (Abbildung 12); um die beiden durchgezogen gezeichneten Kreise zu berühren, müsste ein Lösungskreis den gestrichelt dargestellten Kreis schneiden; das ist aber unmöglich, wenn der gestrichelte Kreis berührt werden soll. Umgekehrt, wenn sich die drei gegebenen Kreise im selben Punkt berühren, dann ist jeder Kreis durch den gemeinsamen Punkt eine Lösung; solche Apollonios-Probleme haben unendlich viele Lösungen. Auch im Fall identischer gegebener Kreise gibt es im Allgemeinen unendlich viele Lösungen. Sind nur zwei Kreise identisch, so gibt es nur zwei verschiedene gegebene Kreise; die Mittelpunkte der Lösungskreise bilden eine Hyperbel, wie im Abschnitt Schnitt von Hyperbeln gezeigt wird.
Eine umfassende Zählung der Lösungen für alle möglichen Konfigurationen von drei gegebenen Kreisen, Punkten oder Geraden wurde zuerst von Muirhead im Jahre 1896 in Angriff genommen, auch wenn es frühere Arbeiten dazu von Stoll und Study gab. Die Untersuchung von Muirhead war jedoch unvollständig; sie wurde 1974 erweitert. Eine endgültige Zählung mit 33 verschiedenen Fällen wurde 1983 veröffentlicht.[1] Obwohl die Lösungen des Apollonischen Problems gewöhnlich paarweise auftreten (siehe Abschnitt Lösungspaare bezüglich Inversion), ist in einigen Fällen eine ungerade Zahl von Lösungen möglich, wie etwa bei der eindeutig bestimmten Lösung des Problems PPP, oder wenn einer der gegebenen Kreise oder alle drei selbst Lösungen sind. (Ein Beispiel dafür sind die Kreise im Satz von Descartes). Es gibt jedoch kein Apollonios-Problem mit genau sieben Lösungen.
Literatur
- H. S. M. Coxeter: The problem of Apollonius, American Mathematical Monthly, Band 75, 1968, S. 5–15
- Frauke Böttcher: Das "Apollonische Berührproblem" – Eine historische Rekonstruktion zur Vermittlung geometrischer Methoden (PDF; 7,2 MB), Universität zu Köln, Mathematisch-Naturwissenschaftliche Fakultät, Seminar für Mathematik und ihre Didaktik (pdf).
- Dana Mackenzie A tisket, a tasket, an Apollonian basket, American Scientist, Band 98, 2010, S. 10–14 (erhielt den Chauvenet-Preis 2015).
Weblinks
Einzelnachweise
- A. Bruen, J.C. Fisher, J.B. Wilker: Apollonius by Inversion. In: Mathematics Magazine. 56, 1983, S. 97–103
- H. Dörrie: The Tangency Problem of Apollonius. In: 100 Great Problems of Elementary Mathematics: Their History and Solutions. 1965, S. 154–160.
- Harold Scott MacDonald Coxeter: The Problem of Apollonius. In: The American Mathematical Monthly. Vol. 75, 1968, S. 5–15.