Stützhyperebene
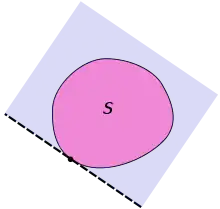
Eine Stützhyperebene oder stützende Hyperebene ist in der Mathematik eine Hyperebene, die den Rand einer gegebenen Teilmenge des euklidischen Raums so schneidet, dass die Menge vollständig in einem der beiden durch die Hyperebene definierten abgeschlossenen Halbräume liegt. Im zwei- und dreidimensionalen Raum spricht man entsprechend auch von einer Stützgerade beziehungsweise einer Stützebene. Für eine konvexe Menge existiert an jedem Randpunkt eine Stützhyperebene, die im Fall von glatten konvexen Mengen sogar eindeutig ist.
Definition
Ist eine Menge im -dimensionalen euklidischen Raum , dann heißt eine Hyperebene Stützhyperebene von , wenn





und
- oder


gelten, wobei und die beiden abgeschlossenen Halbräume zu sind.[1] Derjenige Halbraum, der die zweite Bedingung erfüllt, heißt dann Stützhalbraum von . Ein Randpunkt von , der auf einer Stützhyperebene liegt, wird auch Stützpunkt von genannt. Eine Stützhyperebene heißt eigentlich, wenn ist, ansonsten uneigentlich.[2]




Darstellung
Ist ein Randpunkt von und bezeichnet das Standardskalarprodukt im , dann ist die Hyperebene




mit Normalenvektor genau dann eine Stützhyperebene von durch den Stützpunkt , wenn entweder



für alle Punkte oder


für alle gilt. Durch Orientierung des Normalenvektors, zum Beispiel in Richtung der Menge , kann man sich auch auf einen der beiden Fälle beschränken.[3]
Stützhyperebenen bei konvexen Mengen
Existenzsatz
Der folgende Existenzsatz für konvexe Mengen geht auf Hermann Minkowski (1896) zurück:[4]
- Bei einer konvexen Teilmenge des euklidischen Raums besitzt jeder Randpunkt mindestens eine Stützhyperebene.
Das bedeutet, dass bei einer konvexen Menge zu jedem Randpunkt ein Vektor existiert, sodass
für alle gilt. Bei einer konvexen Menge sind damit alle Randpunkte Stützpunkte.[5]
Beweis
Sei mit eine Folge von Punkten außerhalb des Abschlusses von , die gegen den Randpunkt konvergiert (). Nach dem Trennungssatz existiert nun durch jeden Punkt eine Hyperebene




- ,

sodass gilt. Werden nun die Vektoren auf die Länge eins normiert, dann ist die Folge beschränkt und enthält damit nach dem Satz von Bolzano-Weierstraß eine konvergente Teilfolge . Ist der Grenzwert einer solchen Teilfolge (), dann ergibt sich







für alle . Damit ist die Hyperebene
eine Stützhyperebene im Stützpunkt mit zugehörigen Stützhalbraum .[5]
Anmerkungen

Hat die Menge ein nichtleeres Inneres, ist also , dann gilt auch die Umkehrung und ist konvex, wenn alle Randpunkte von Stützpunkte sind. Somit ergibt sich die folgende Charakterisierung konvexer Mengen:

- Eine Teilmenge des euklidischen Raums mit nichtleerem Inneren ist genau dann konvex, wenn alle ihre Randpunkte Stützpunkte sind.
Die Menge ist dabei streng konvex, wenn jede Stützhyperebene an genau einen Stützpunkt enthält. Bei einer streng konvexen Menge sind damit die Stützhyperebenen zu verschiedenen Stützpunkten ebenfalls verschieden und jeder Randpunkt der Menge ist ein Extremalpunkt.[6] Ein verwandtes Resultat ist der Satz von Minkowski.
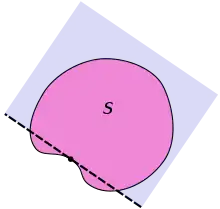
Eine Stützhyperebene durch einen gegebenen Stützpunkt muss jedoch nicht notwendigerweise eindeutig bestimmt sein, wie das Beispiel in der nebenstehenden Abbildung zeigt. Konvexe Mengen, bei denen die Stützhyperebene durch einen gegebenen Randpunkt eindeutig ist, heißen glatt konvex.[7] Sie spielen eine wichtige Rolle in der Theorie glatter Räume.
Verallgemeinerung
Stützhyperebenen werden allgemeiner auch in beliebigen topologischen Vektorräumen betrachtet. Eine Stützhyperebene an eine Teilmenge eines topologischen Vektorraums im Randpunkt ist dann eine reelle Hyperebene


- ,

wobei ein reelles lineares Funktional ist, welches nicht das Nullfunktional ist und dabei die Ungleichung


für alle erfüllt.[8] Ein solches Funktional wird auch als Stützfunktional an bezeichnet. Besitzt ein gegebener Randpunkt eine derartige Stützhyperebene (und damit ein derartiges Stützfunktional), so wird er als Stützpunkt der Teilmenge bezeichnet.[9]
Siehe auch
- Gleichdick, eine Fläche, bei der alle parallelen Stützgeraden den gleichen Abstand haben
- Stützlinie
- Stützstelle
- Stützvektor
Literatur
- Rainer E. Burkard, Uwe T. Zimmermann: Einführung in die Mathematische Optimierung. Springer, 2012, ISBN 978-3-642-28673-5.
- Peter Gritzmann: Grundlagen der mathematischen Optimierung. Springer, 2013, ISBN 978-3-8348-2011-2.
- Dieter Jungnickel: Optimierungsmethoden: Eine Einführung. Springer, 2014, ISBN 978-3-642-54821-5.
- Gottfried Köthe: Topologische Lineare Räume I. Springer, 2013, ISBN 978-3-662-24912-3.
- Jürg T. Marti: Konvexe Analysis. Springer, 2013, ISBN 978-3-0348-5910-3.
Einzelnachweise
- Günter Ewald: Combinatorial convexity and algebraic geometry. In: Graduate texts in mathematics. Nr. 168. Springer, New York 1996, ISBN 978-1-4612-8476-5, S. 12.
- Peter Gritzmann: Grundlagen der mathematischen Optimierung. Springer, 2013, S. 261.
- Dieter Jungnickel: Optimierungsmethoden: Eine Einführung. Springer, 2014, S. 35.
- Hermann Minkowski: Geometrie der Zahlen. Leipzig 1896.
- Rainer E. Burkard, Uwe T. Zimmermann: Einführung in die Mathematische Optimierung. Springer, 2012, S. 247.
- Gottfried Köthe: Topologische Lineare Räume I. Springer, 2013, S. 346.
- Jürg T. Marti: Konvexe Analysis. Springer, 2013, S. 108.
- Gottfried Köthe: Topologische Lineare Räume I. Springer, 2013, S. 196.
- Jürg T. Marti: Konvexe Analysis. Springer, 2013, S. 66–67.
Weblinks
- Supporting hyperplane. In: Michiel Hazewinkel (Hrsg.): Encyclopedia of Mathematics. Springer-Verlag und EMS Press, Berlin 2002, ISBN 978-1-55608-010-4 (englisch, online).