Knicken
Unter Knicken versteht man in der Technischen Mechanik den (plötzlichen) Stabilitätsverlust von Stäben durch seitliches Ausweichen unter axialer Druckbeanspruchung. Das Knicken tritt dann ein, wenn der Stab jene Druckspannung erreicht, bei der er sein stabiles Gleichgewicht verliert. Die in der Praxis immer vorhandenen minimalen Abweichungen von der völlig symmetrischen Belastung und gleichmäßigen Form des Stabs führen bei stärkerer Beanspruchung zunächst zur elastischen Biegung des Stabs. Ab einer kritischen Beanspruchung gibt der Stab (plötzlich) nach, verformt sich stark. Die kritische Druckbeanspruchung hängt von der Biegesteifigkeit des Querschnittes, und des Elastizitätsmoduls (E-Modul) des Materials ab. Die kritische Druckspannung ist bei schlanken Stäben kleiner als die Biege- und Druckfestigkeit des Materials.
Während bei sehr gedrungenen Stäben unter einer zu hohen Druck-Belastung das Material nachgibt, versagen Stäbe ab einer gewissen Länge durch Knicken, bevor die höchstzulässige Druckspannung des Materials erreicht ist. Die Gefahr des Knickens ist abhängig von:
- der Einleitung der Druckkraft (symmetrisch oder einseitig asymmetrisch),
- der Lagerung der Enden des Stabs (etwa per Drehgelenk, verschieblich mit Schub- oder Drehschubgelenk oder fest eingespannt); siehe “Eulersche Knickfälle”
- der Geometrie des Stabquerschnitts, aus der sich das Flächenträgheitsmoment ergibt,
- dem Elastizitätsmodul des Materials, aus dem der Stab gefertigt ist.
Man unterscheidet
- Biegeknicken (seitliches Ausweichen der Stabachse),
- Drillknicken (Verdrehen des Stabquerschnitts) und
- Biegedrillknicken (Verdrehen eines Stabquerschnitts bei gleichzeitigem seitlichen Ausweichen).
Dieser Artikel behandelt nur das Knicken eines stabförmigen Bauelements unter Druckkraft. Wenn man Knicken mit einem konstanten E-Modul rechnet, dann gilt diese Berechnung nur für elastisches Verhalten. Ersteres wird im Alltag gewöhnlich als "Knicken" bezeichnet.
Eulersche Knickfälle (Biegeknicken)
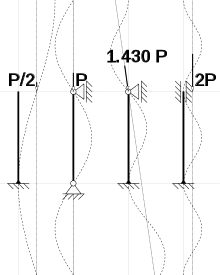
1) eingespannt/ frei, 2) gelenkig/ gelenkig, 3) eingespannt/ gelenkig, 4) eingespannt/ eingespannt
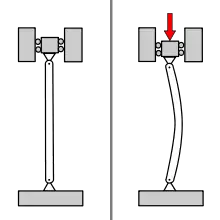
Nach Leonhard Euler, der das Knicken schlanker Stäbe als erster behandelt hat, sind vier Fälle für das Knicken des elastischen Stabes mit mittig wirkender Druckkraft benannt. Diese vier Eulerfälle sind in der Baupraxis und Maschinentechnik nicht die einzigen, die vorkommen. Es fehlen z. B. die Fälle, wenn der Stab oben vertikal geführt ist, aber seitlich ausweichen kann. Der zusätzlich unten eingespannte Stab ist ein sinnvolles Modell für Säulen in Skelettbauweise und entspricht numerisch dem Eulerfall (2)[1]. Weiter fehlen elastisch gebettete Stäbe (z. B. Pfähle) als auch Drehfedermodelle, die in der Realität praktisch immer vorherrschen, da man i. d. R. weder ideale Einspannungen noch ideale Gelenke herstellen kann.
Euler untersuchte das Gleichgewicht der Spannungen an bereits verformten Stäben, dieser Lösungsansatz war für seine Zeit neu und führte zu umfangreichen Erkenntnissen innerhalb der Stabilitätstheorie.
Annahmen
Es gelten die bernoullischen Annahmen in der Stabtheorie II.Ordnung. Für Knickstäbe in der X-Z-Ebene mit X der Stabachse gelten folgende Annahmen:











mit
- … der Verschiebung in Längsrichtung
- … der Verschiebung in Z-Richtung
- … den Verzerrungskomponenten
- … der Querkraft bzw. Transversalkraft in Z-Richtung
- … der konstanten Normalkraft in Längsrichtung
- … der konstanten Dehnsteifigkeit in Längsrichtung
- … der konstanten Biegesteifigkeit um die Y-Achse
- … der konstanten Schubsteifigkeit in der XZ-Ebene








Daraus folgen die Differentialgleichungen:



mit
- … der lastinduzierten Verformung
- … der Vorverformung
- … der Gesammtverformung



Der zweite Eulerfall
Die Eulerschen Knickfälle gelten für Stäbe mit konstantem Querschnitt über die ganze Länge. Für jeden dieser Fälle ermittelte er die kritische Druckkraft, bei deren Überschreiten das Knicken eintritt. Hierzu gibt es unterschiedliche Möglichkeiten der Herleitung.[2] Die folgende Herleitung für den sogenannten Eulerfall (2) hat den Vorteil, besonders anschaulich zu sein.[3]
Die ideale Knickdrucklast nach Theorie II.Ordnung ist unabhängig von der gewählten Vorverformung. Mit dem Biegemoment aus der Druckkraft und dem Ausbiegemaximum kann mit der Differentialgleichung der Elastischen Linie die sich einstellende zusätzliche Ausbiegung errechnet werden. Diese ergibt ein weiteres zusätzliches Biegemoment und die weitere zusätzliche Ausbiegung . Der Vorgang wiederholt sich unendlich viele Male. Die Gesamt-Ausbiegung ist



- .

Die jeweils folgende Ausbiegung sei (mit ) .


Damit folgt
- .

Da die jeweils folgende der vorhergehenden Biegung ähnlich ist (sinusförmig), kann geschrieben werden:
- ,

und mit

- .

Diese geometrische Reihe konvergiert. Ihr Summenwert ist endlich groß. Mit anderen Worten: Wenn , hat die Endausbiegung einen endlichen Wert. Bei knickt der Stab aus.



- wird Knickbedingung genannt.
Die kritische Druckkraft bzw. die Eulerkraft errechnet sich wie folgt:

Gleichung für angenommene anfängliche Biegelinie:
- .

Differentialgleichung für :
- (mit … Elastizitätsmodul und … axiales Flächenträgheitsmoment des Querschnittes)



Nach zweimaliger Integration (Randbedingungen , wenn bzw. ) und Einsetzungen:



- .

- .

Wenn , dann ist die kritische Druckkraft:
- .

Die Eulerfälle (1) und (4)
In diesen beiden Eulerfällen sind die sinusförmig angenommenen Biegelinien andere Ausschnitte einer ganzen Sinuslinie (siehe obige Abbildung), weshalb ihre Gleichungen unmittelbar aus der für den Fall (2) folgen:
(2): halbe Sinuswellenlänge; Länge , ,
(1): viertel Cosinuswellenlänge; Länge , ,
(4): ganze Cosinuswellenlänge; Länge , .






wird als Knicklängenbeiwert und als Knicklänge bezeichnet.


Die anderen kritischen Druckkräfte sind :
- (1):
- (4):


Der dritte Eulerfall
- [4]
- (3):



Weitere Größen
Als weitere Größe wird der Schlankheitsgrad verwendet:


wobei für den Trägheitsradius des Querschnittes steht.

Weiterhin ergibt sich die Knickspannung unter der Annahme der linearen Elastizität zu:


Die Funktion ergibt eine Hyperbel zweiten Grades, die so genannte Euler-Hyperbel. Dividiert durch den Elastizitätsmodul ergibt sich die Knickdehnung, eine Größe, die nur von der Geometrie (Länge, Querschnittsform und -größe, Lagerung) abhängig ist.



Tabelle für alle idealen Basis-Einzelstabbiegeknickfälle in 2D
| Euler-Fall 1 | Euler-Fall 2 | Euler-Fall 3 | Euler-Fall 4 | verschiebliche Einspannung | |
|---|---|---|---|---|---|
| Abbildungen |  | ||||
| Verschiebungs- bzw. Kraftrandbedinung bei | |||||
| Verdrehungs- bzw. Momentenrandbedinung bei | |||||
| Verschiebungs- bzw. Kraftrandbedinung bei | |||||
| Verdrehungs- bzw. Momentenrandbedinung bei | |||||
| Knickfigur |



















Alle weiteren idealen (d. h. ohne (dreh-)Federn) Einzelstabbiegeknickfälle können durch spiegeln und/oder verschieben der Knickfigur der obigen erzeugt werden, ohne dass sich die Knicklast ändert.
Nicht elastisches Ausknicken nach Tetmajer

Bei gedrungenen Stäben schließt sich unterhalb eines Grenzschlankheitsgrades ein Bereich des Knickens an, der nicht mehr alleine durch die Elastizität des Materiales gekennzeichnet ist. Für einen Baustahl mit der Bezeichnung S235JR (S235JRG2 – alte Bezeichnung: St37) liegt die Grenze für bei 105. Für andere Werkstoffe werden ähnliche Grenzwerte angegeben.
Die Grenzschlankheit lässt sich auch berechnen. Sie ergibt sich zu:
- ,

wenn die Proportionalgrenze des Werkstoffes des gedrückten Stabes ist.

Unterhalb dieses Grenzschlankheitsgrades sind Gleichungen nach Tetmajer gültig. Dies sind Zahlenwertgleichungen, die den Schlankheitsgrad als unabhängige Variable in der Funktion haben. Sie haben folgenden Aufbau:
- .

Die Koeffizienten für die Tetmajer-Gleichung können für die geläufigsten Bauwerkstoffe der folgenden Tabelle entnommen werden:
| Werkstoff | Koeffizient a | Koeffizient b | Koeffizient c |
|---|---|---|---|
| Nadelholz | 29,3 | −0,194 | 0,000 |
| Gusseisen (Grauguss) | 776,0 | −12,000 | 0,053 |
| Baustahl S235JRG2 (St37) | 310,0 | −1,140 | 0,000 |
| Baustahl S355J2G3 (St52) | 335,0 | −0,620 | 0,000 |
Ein- oder zweiachsiges Biegeknicken
Es seien die Stab- bzw. Balkenachse, und die Hauptträgheitsachsen des (nicht verwundenen) Querschnittes. Dann ist – wenn die Randbedingungen es erlauben – ein Ausweichen der Stabachse


- nur in der xη-Ebene (einachsiges Knicken, im Allgemeinen ist maßgebend) oder
- nur in der xζ-Ebene (einachsiges Knicken, im Allgemeinen ist maßgebend) oder
- in beiden Ebenen gleichzeitig (zweiachsiges Knicken)


möglich. Letztere Möglichkeit ist insbesondere dann zu berücksichtigen, wenn Knicklasten für das einachsige Knicken in den beiden Ebenen nicht weit auseinanderliegen. Eine getrennte Behandlung der beiden einachsigen Knickvorgänge ist dann nicht möglich, weil Einflüsse nichtlinearen Materialverhaltens eine Kopplung bewirken. Anzumerken ist, dass für Knicken Krümmungen () (z. B. zufolge Belastung (Biegemoment,Temperaturdifferenzen), Vorverformungen (z. B. Vorverdrehungen , oder Vorverkrümmungen) sowie andere Imperfektionen und Querbelastungen(, , )) sich maßgeblich auf die Stabilitätsgefährdung auswirken und es deshalb dazu führen kann, dass Träger um die Starke Achse ausknicken (z. B. Sparren eines Dachstuhles).





Knicken unter axialen Massenkräften

Das Knicken unter axialen Massenkräften, z. B. dem Eigengewicht oder bei hoher axialer Beschleunigung ist ein Stabilitätsfall, der nicht mit den von Euler oder von Tetmajer überlieferten Lösungsansätzen berechnet werden kann. Die kombinatorische Variation der möglichen Lagerungen ergibt sieben verschiedene Knickfälle[5]. Bei zylindrischen Stäben führen solche Knickprobleme auf Besselsche Differentialgleichungen, deren Lösungen mit Hilfe tabellierter Besselfunktionen numerisch bestimmt werden müssen[6]. Ein klassisches Beispiel für dieses Problem sind die Schornsteine großer Kohlekraftwerke. Die Bestimmung der notwendigen Flächenträgheitsmomente für einen solchen Fall kann mit dem Verfahren von Ritz erfolgen. Heutzutage wird es durch die Finite-Elemente-Methode häufig aus der Praxis verdrängt.
Drillknicken und Biegedrillknicken
Reines Drillknicken (Verdrillung des Stabes bei unverändert gerader Stabachse) ist im Allgemeinen nicht von praktischem Interesse, weil ein Ausweichen der Stabachse in der Regel bereits bei geringeren Lasten eintritt.
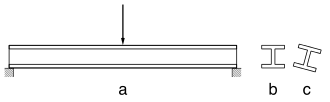
a) Ansicht (ohne Verformung gezeichnet)
b) Querschnitt in der Nähe des Auflagers
c) infolge Biegedrillknickens verdrehter Querschnitt in Trägermitte
Dagegen ist die Stabilität eines Trägers unter Umständen auch dann durch Biegedrillknicken gefährdet, wenn keine Druckkräfte vorhanden sind. Das Bild zeigt ein Beispiel, eine ältere Bezeichnung für das Versagen eines biegebelasteten Trägers durch Biegedrillknicken ist Kippen.
Der Widerstand gegen Biegedrillknicken wird neben den oben angeführten Einflüssen durch die Verdrehsteifigkeit und durch verdrehungsbehindernde Stützung des Balkens beeinflusst.
Mathematische Modelle des Knickproblems
Die Differentialgleichung des Knickproblems kann durch die Formulierung der Gleichgewichtsbedingungen am verformten Stab oder Balken gewonnen werden (Theorie II. Ordnung, siehe Baustatik).
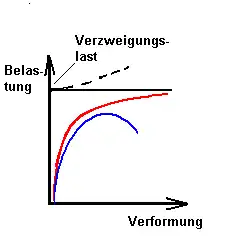
Wird die Differentialgleichung für einen geraden, unbeschränkt elastischen Stab bei mittiger Lasteintragung linearisiert, so führt das mathematisch auf ein Eigenwertproblem. Beim ersten Eigenwert verzweigt sich die Lösung der Differentialgleichung, die Grenze der Stabilität ist erreicht (schwarze horizontale Linie). Verzichtet man auf die Linearisierung der Differentialgleichung, dann zeigt sich, dass mit rasch wachsender Verformung noch eine (geringe) Laststeigerung erreicht werden kann (gestrichelte schwarze Linie).
Werden die (unvermeidlichen) Imperfektionen (Vorverformungen der Stabachse, Ungleichmäßigkeiten des Werkstoffes, Eigenspannungen, Exzentrizität der Lasteintragung) berücksichtigt, dann entsteht eine inhomogene Differentialgleichung (kein Eigenwertproblem). Die Verformungen nehmen schon vor dem Erreichen der Verzweigungslast stark zu. Die Kurve nähert sich – wenn die Differentialgleichung linearisiert wurde – der Verzweigungslast asymptotisch (rote Kurve). Voraussetzung dafür ist, dass der Werkstoff im rein elastischen Bereich bleibt und die Stäbe schlank sind.
Bei einer Teilplastifizierung des Querschnittes bei gedrungenen Stäben unterhalb der Verzweigungslast kann diese nicht erreicht werden (blaue Kurve).
Knicknachweis bei stabilitätsgefährdeten Stabkonstruktionen aus Stahl
Die seit November 2010 gültige DIN EN 1993-1-1:2010 (Eurocode 3) lässt drei Verfahren zu:
- Berechnung des Gesamtsystems nach Theorie II. Ordnung, wobei die zu berücksichtigenden Imperfektionen durch die Norm vorgegeben sind oder
- Teilsysteme des Tragwerks werden mit Vorverkrümmungen und -verdrehungen nach Theorie II. Ordnung nachgewiesen. Außerdem werden der Biegedrillknicknachweis und der Biegeknicknachweis mit dem Ersatzstabverfahren durchgeführt.
- Anwendung des „Ersatzstabverfahrens“ für die einzelnen Stäbe nach Theorie I. Ordnung. Hier sind die zu berücksichtigenden Imperfektionen implizit im Berechnungsverfahren enthalten.
Das Omega-Verfahren
Das -Verfahren wurde von der Deutschen Reichsbahn für die eigenen Stahlbrücken aus Baustahl entwickelt und war in der DIN 4114 festgelegt. Es lieferte einen sehr einfachen Nachweis der Knicksicherheit. In Abhängigkeit vom Schlankheitsgrad wurden die Knickzahlen in zwei Tabellen für die Werkstoffe S235JR+AR (St37) und S355J2+N (St52) aufgetragen. Bei Schlankheitsgraden kleiner als 20 war kein Knicksicherheitsnachweis notwendig; Schlankheitsgrade größer 250 waren unzulässig. Die auch -Zahlen genannten Knickwerte lagen zwischen 1 und 10,55 bei S235JR+AR. Der Sicherheitsnachweis hatte die folgende Form:




Der Wert von entspricht der zulässigen Druckspannung für den entsprechenden Werkstoff im zugehörigen Lastfall. Der große Vorteil des Verfahrens lag in der Tatsache, dass der Knicknachweis auf einen einfachen Spannungsnachweis mit Druckkräften reduziert wurde. In den -Zahlen waren Knicksicherheiten von 1,3 bis 1,5 eingearbeitet.

Für den Fall, dass keine Tafel der -Zahlen zur Verfügung steht, können für den Werkstoff S235JR+AR (St37) die -Zahlen näherungsweise nach der folgenden Formel bestimmt werden:


Das Verfahren wurde zwischenzeitlich durch andere und genauere Verfahren ersetzt, besitzt aber durch seine Anschaulichkeit noch eine gewisse Bedeutung in der Ausbildung von Ingenieuren.
Literatur
- István Szabó: Einführung in die Technische Mechanik. 8. neu bearbeitete Auflage, Springer Verlag Berlin 1975, Nachdruck 2003, ISBN 3-540-44248-0.
- Alf Pflüger: Stabilitätsprobleme der Elastostatik. 3. Aufl., Springer Verlag Berlin 1975, ISBN 3-540-06693-4.
- Stephen P. Timoshenko, James M. Gere: Theory of Elastic Stability. McGraw-Hill New York/Toronto/London, 2nd Ed. 1961. Neudruck Dover Publications 2009, ISBN 978-0486-47207-2.
- Jürgen Fehlau: Einführung in DIN EN 1993 (EC 3).
- Karl-Eugen Kurrer: Geschichte der Baustatik. Auf der Suche nach dem Gleichgewicht, Ernst und Sohn, Berlin 2016, S. 519–521 und S. 588–602, ISBN 978-3-433-03134-6.
Weblinks
Einzelnachweise
- Kunz, Johannes: Druckbelastungsgrenzen von Stäben geringer Schlankheitsgrade. In: Konstruktion 60(2008)4, S. 94–98
- August Föppl: Vorlesungen über Technische Mechanik - dritter Band: Festigkeitslehre, Verlag Oldenbourg, 1944, zehnter Abschnitt
- Fritz Stüssi: Baustatik I, Birkhäuser, 1971, Seite 324
- FindRoot[ Tan[Pi/x] - Pi/x==0, {x, 0.67, 1}, WorkingPrecision -> 60]. In: WolframAlpha. Abgerufen am 12. Juli 2020.
- Kunz, Johannes: Knicken unter der Wirkung axialer Massenkräfte. In: Kunststoffe 102(2012)9, S. 86–89
- Willers, F. A.: Das Knicken schwerer Gestänge. In: Z. angew. Math. Mech. 21(1941)1, S. 43–51.