Direktantrieb
Direktantriebe sind Antriebe, bei denen die Antriebsmaschine und die Arbeitsmaschine ohne Getriebe direkt verbunden sind.[1] Der Motor wird so ausgelegt, dass er die Drehzahl der Arbeitsmaschine hat.
Eigenschaften
Durch den Wegfall des Getriebes im Antriebsstrang wird dessen Gesamtwirkungsgrad besser, weil die Reibungsverluste des Getriebes entfallen. Weiter gibt es keine Bewegungsungenauigkeiten durch Spiel im Getriebe, was bei Positionierantrieben nicht erwünscht ist, und die Wartung wird vereinfacht, weil es weniger Verschleißteile gibt. Durch den Wegfall des Getriebes wird der Antriebsstrang kostengünstiger[1] und konstruktiv einfacher.
Gegenüber Antrieben mit Getriebe hat der Direktantrieb den Nachteil, dass die Drehzahl durch die Antriebsmaschine limitiert ist. Bei Elektroantrieben, die direkt aus dem 50 Hz-Landesnetz versorgt werden, ist die maximale Drehzahl aus technischen Gründen auf 3000 min−1 beschränkt, höhere Drehzahlen können nur mithilfe von Getrieben oder Frequenzumrichtern erreicht werden. Viele Strömungsmaschinen, wie z. B. Verdichter, lassen sich aber bei höheren Drehzahlen einfacher und kleiner bauen.
Bei einem Direktantrieb muss die Antriebsmaschine das Antriebsmoment der Arbeitsmaschine aufbringen. Durch Einbau eines Getriebes kann das Antriebsmoment des Motors kleiner gewählt werden, was den Motor kleiner, leichter und kostengünstiger macht.[1] Ist die Drehzahl hoch, kann nicht nur das Getriebe eingespart werden, sondern auch die Masse des Motors wird geringer, da die abgegebene Leistung bei gleichem Drehmoment mit steigender Drehzahl steigt. Ist dagegen eine niedrige Drehzahl erforderlich, ist ein geeigneter direkt antreibender Motor oft schwerer als ein Getriebemotor (Untersetzungsgetriebe + schnelllaufender Motor).
Direktantriebe können nur durch die Veränderung der Drehzahl der Antriebsmaschine drehzahlvariabel gemacht werden. Bei Elektroantrieben kann dies durch Frequenzumrichter (FU) bewerkstelligt werden, der den Motor auch mit Frequenzen höher als 50 Hz versorgen kann, womit die 3000 min−1-Beschränkung für die Höchstdrehzahl des Antriebsstranges wegfällt. Eine andere Möglichkeit zur Drehzahlregelung ist die Verwendung von polumschaltbaren Motoren oder Dahlandermotoren, bei denen aber die Höchstdrehzahl immer noch bei 3000 min−1 liegt.
Funktion
Zu den Direktantrieben gehören alle elektrischen Linear- und Torquemotoren. Die physikalisch-technischen Prinzipien zur Kraft- beziehungsweise Drehmomenterzeugung können dabei sehr unterschiedlich sein. Ihre Spanne reicht von Asynchronmotoren über Schrittmotoren bis hin zu permanenterregten Synchronmotoren (PMS) unterschiedlicher Bauart. Allen Direktantrieben gemein ist die direkte Kopplung eines beweglichen Motorelements mit der zu bewegenden Masse, zum Beispiel eines Linear- oder Drehtisches oder einer Schwenkbrücke im Maschinenbau.
Der Wegfall von Bewegungswandlern, zum Beispiel Kugelrollspindel oder Getriebe, führt zu einer Masse- beziehungsweise Trägheitsmomentreduktion. Damit werden Direktantriebe gegenüber konventionellen Antrieben deutlich dynamischer. Man erreicht entweder kürzere Reaktionszeiten, höhere Bahntreue im Maschinenbau, höhere Endgeschwindigkeiten oder höhere Drehzahlen. Die direkte Kopplung zwischen Motor und zu bewegendem Objekt vermeidet Spiel und Elastizitäten. Damit steigt die Genauigkeit. Bei Positionierantrieben erhöht sich die Regelsteifigkeit und Konturtreue. Letztendlich sind Positionierauflösungen im Mikrometer- und Submikrometerbereich erreichbar.
Ihr Aufbau ist einfacher, kompakter und letztendlich auch zuverlässiger. Bei der Anwendung von Direktantrieben sind jedoch auch einige Besonderheiten zu beachten, wie zum Beispiel die fehlende Selbstsperrung oder -hemmung. Dadurch machen viele Applikationen Bremsen oder Puffer erforderlich. Bei Bewegung gegen die Schwerkraft können ebenso Gewichtsausgleichsmaßnahmen notwendig sein.
Da sie ohne Getriebe direkt an die Maschine angeschlossen sind, sind Direktantriebe natürlich auch lastabhängiger als konventionelle Antriebe; und durch ihre direkte Masseankopplung auch schwingungsanfälliger. Das ist sowohl bei der Auslegung der Motoren als auch bei der Parametrisierung der Regelstrukturen zu berücksichtigen. Letztendlich ist die gesamte Konstruktion sehr steif und direktantriebsgerecht auszuführen. Die Kräfte von Linearmotoren reichen größenabhängig von einigen Newton bis in den Bereich von 20 kN, bei Torquemotoren von wenigen Nm bis 100 kNm. Durch den Wegfall der Kraft- beziehungsweise Momentübersetzung sind den Direktantrieben im Schwerlastbereich Grenzen gesetzt.
Linearmotoren und Torquemotoren arbeiten grundsätzlich nach den gleichen Wirkprinzipien. Torquemotoren können als aufgewickelte Linearmotoren, letztere als abgewickelte Torquemotoren mit zwei Enden betrachtet werden. Kraft und Drehmoment sollten bei der Bewegung möglichst gleichförmig sein. Die verbleibende Restwelligkeit (Cogging, Lastpulsation) bestimmt maßgeblich die Qualität eines Direktantriebs. Das Cogging ist magnetisch bedingt und tritt bereits im stromlosen Zustand auf. Bei Bestromung des Motors kommt stromabhängig die Lastpulsation hinzu. Verschiedene Motorprinzipien bringen diese Effekte mehr oder weniger stark hervor oder unterdrücken sie auch gänzlich.
Der Direktantrieb muss für höchste Genauigkeitsforderungen in Verbindung mit einem hochauflösenden Messsystem und eingebunden in eine Regelstruktur eine sehr stromproportionale Kraft erzeugen, also ein möglichst lineares Verhalten aufweisen. Nur so sind feinste Zustellungen oder eine Geschwindigkeits- und Drehzahlkonstanz möglich. Die Kraft eines Linearmotors und das Drehmoment eines Torquemotors entstehen im Arbeitsluftspalt, also der aktiven Grenzfläche zwischen Primär- und Sekundärteil. Bei Permanentmagnetmotoren ist das die Fläche über den Permanentmagneten.
- Unterschiede im Aufbau
- Linearmotoren bestehen gewöhnlich aus einem bestromten Primärteil, dem Blechpaket mit Spulensystem, und einem passiven Sekundärteil. Je nachdem, welches Wirkprinzip zugrunde liegt, ist das Sekundärteil entweder als Zahnschiene ausgebildet, mit Induktionsschleifen oder mit Permanentmagneten bestückt. Bei den weit verbreiteten PMS-Linearmotoren befinden sich die Permanentmagnete mit wechselnder Polarität (N-S-N-S ...) auf der Oberfläche des Sekundärteils, auf einer Magnetschiene. Bei Bestromung des meist 3-phasig ausgebildeten Primärteils entsteht eine stromabhängige Kraft zwischen Primär- und Sekundärteil. In Kombination mit Linearführungen und Messsystem zur Positionserfassung sind so auf relativ einfache Art zum Beispiel Lineartische für die Werkzeugmaschine realisierbar.
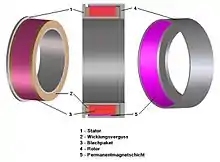
- Torquemotoren bestehen ebenfalls aus einem bestromten Primärteil, dem Stator, und einem passiven Sekundärteil, auch Rotor genannt. Bei den ebenfalls weit verbreiteten PMS befinden sich auf einem meist zylindrischen Rotorring die Permanentmagnete, ebenfalls wechselnd polarisiert und zum Arbeitsluftspalt zeigend. In Sonderfällen sind die Magnete eingebettet. Je nachdem, ob der Rotor innen- oder außenliegend ist, spricht man von Innenläufer- beziehungsweise Außenläufermotor. Koppelt man den Rotor an einen geeignet gelagerten Drehtisch, so ist in Kombination mit einem Winkelmesssystem ein relativ einfacher Dreh- oder Schwenkachsaufbau möglich.
Je nach Motortopologie, dem Aufbau von Stator und Rotor, ergeben sich verschiedene Eigenschaften und Anpassungsmöglichkeiten. Demzufolge gibt es nicht den Linearmotor oder Torquemotor, sondern eine Vielzahl unterschiedlicher Typen, Baureihen und kundenspezifischer Anpassungen. Die Freiheitsgrade in der Gestaltung sind wesentlich höher als bei konventionellen Antrieben.[2]
Vor- und Nachteile
Vorteile
- Getriebe entfällt, dadurch geringere Kosten, weniger Wartung und besserer Wirkungsgrad[1]
- weniger Verschleiß[1] und Geräusch
- bei schnelllaufenden Direktantrieben geringeres Volumen, geringere Masse, hohe Leistungsdichte
- höhere Systemsteifigkeit, kein Spiel[1]
- kompaktere Bauweise
- hohe Dynamik
Nachteile
- Zwecks Direktantrieb langsam laufende Motoren sind bei gleicher Leistung schwerer oder sie besitzen nur ein geringes Drehmoment.
- Direktantriebe erfordern oft speziell konstruierte Motoren, die nicht nur spezielle Drehzahlen erzeugen, sondern oft auch robustere Lager besitzen müssen, um zusätzliche Lagerkräfte oder Unwuchten aufzunehmen. Daher können sie oft nur bei in hohen Stückzahlen gefertigten Produkten eingesetzt werden.
Beispiele
Beispiele für elektrische Direktantriebe sind Staubsaugergebläse (Universalmotor), Mixer, Zentrifugen (Laborzentrifugen, Fruchtsaftzentrifugen), Ventilatoren und Wäscheschleudern. Weiter stationäre Schleifmaschinen (Schleifbock) oder Wasserpumpen, die meist mit Asynchronmotoren betrieben werden.
Auch bei vielen herkömmlichen Werkzeugmaschinen werden Direktantriebe mit an der Netzwechselspannung betriebenen Asynchronmotoren, die Drehzahlen von knapp 3000 oder 1500 min−1 abgeben, eingesetzt.
Beispiele für direktantreibende Verbrennungsmotoren und Dampfmaschinen sind etwa direktantreibende Schiffsdieselmotoren, direktangetriebene Dampflokomotiven und Flugmotoren ohne Propellergetriebe.
Oft sind die Drehzahlen ein Unterteilungsmerkmal:
Langsamläufer
Durch eine hohe Polzahl wird bei bestehender Speisefrequenz die Drehzahl deutlich gesenkt. Während ein Normmotor meist 2- oder 4-polig ist und somit bei 50 Hz eine Drehzahl von 3000 bzw. 1500 min−1 besitzt, hat eine 30-polige Maschine eine Nenndrehzahl von 200 min−1.
Langsamläufer mit hoher Polzahl haben einen großen Durchmesser, der mehrere Meter betragen kann.
Eine klassische Anwendung von Langsamläufern sind zum Beispiel Generatoren in Wasserkraftwerken mit der Drehzahl 65,2 min−1 und einer Polzahl von 92.
Die Drehzahl von Synchrongeneratoren oder Asynchronmotoren kann variieren, wenn sie über einen Frequenzumrichter angeschlossen sind.
Langsamläufer sind häufig auch permanenterregte Gleichstrommotoren oder (teils elektronisch kommutierte) vielpolige Synchronmotoren.
Weitere Beispiele
- Einsatz in bestimmten Windkraftanlagen: typische Daten: ca. 3 MW, Frequenz ca. 15 Hz, Drehzahl ca. 17 min−1, Polzahl ca. 100, Durchmesser ca. 5 m, Netzeinspeisung mittels Vollumrichter
- Seilbahn- oder Förderbandantrieb: Direktantrieb der Seilscheibe, wird z. B. durch Leitner AG[3] und Doppelmayr GmbH[4] angeboten
- Propellergondel-Antrieb (Schiffe): direkt angetriebener Propeller
- Plattenteller-Direktantrieb (höherwertige Plattenspieler)
- Bobbins oder Wickeldorne (höherwertige Tonbandgeräte)
- Antriebe von Drehrohrofen, der meist um den Ofen herumgebaut ist
- Direktantriebe bei Fahrzeugen, meist als Außenläufer gebaut
- Getriebelose Radnabenmotoren bei Fahrrädern, PKW und Versehrtenfahrzeugen
- Getriebelose Nabendynamos bei Fahrrädern
- Dynastart, eine Anlasser-Generator-Kombination direkt auf der Motorwelle von PKW-Verbrennungsmotoren
- Achsmotoren bei Eisenbahnfahrzeugen, in den Anfängen verwendet und neulich wieder bei Syntegra mit Permanentmagnetmotor
- Schiffsantrieb: Direktantrieb von Schiffsdieselmotor auf die Wellenanlage, für die Drehrichtungsänderung muss der Motor gestoppt werden und die Steuerung der Zylinder durch Verschieben der Nockenwelle so geändert werden, dass die Maschine nach dem Neustart rückwärts läuft[5]
- Dampflokomotive, Antriebe mit Dampfmaschinen
- Flugmotoren ohne Propellergetriebe, wie zum Beispiel Sternmotoren, teilweise auch als Umlaufmotoren gebaut.
Schnellläufer
Schnellläufer laufen deutlich schneller als Normmotoren. Es gibt Motoren, die über 100.000 min−1 erreichen, zum Beispiel beim Einsatz in elektrischen Turboladern. Dies wird erzielt durch eine Speisung mit Frequenzumrichtern mit einer Speisefrequenz von mehreren Hundert Hz bis über 1000 Hz. Der Motor ist kleiner gegenüber einem Normmotor mit gleicher Leistung. Die umlaufenden Teile müssen teils erhebliche Radialbeschleunigungen (Fliehkraft) aushalten.
Weitere Beispiele
- Spindelantrieb für Textilmaschinen: direkt in die Spindel integriert, hochdynamisch
- Motorspindel bei Werkzeugmaschinen
- Turbomolekularpumpe (Vakuumpumpe), ca. bis 100.000 min−1
- Elektrischer Turbolader: Drehzahl 130.000 min−1
Literatur
- Joachim Klement: Technologie der elektrischen Direktantriebe. expert verlag, 2009, ISBN 978-3-8169-2822-5 (google.de).
Einzelnachweise
- Getriebe vs. Direktantrieb. 13. November 2018 (aradex.de).
- Direktantriebe passend ausgewählt. In: Detmar Zimmer, Joachim Böcker, Alexander Schmidt, Bernd Schulz, Universität Paderborn. Februar 2005, abgerufen am 23. Juli 2019.
- DirectDrive. LEITNER ropeways, abgerufen am 2. Dezember 2018.
- Doppelmayr Direct Drive | Produkte | Doppelmayr Seilbahnen GmbH. Abgerufen am 16. März 2021.
- Günter Mau: Handbuch Dieselmotoren im Kraftwerks- und Schiffsbetrieb. Springer-Verlag, 2013, ISBN 978-3-322-90621-2 (google.de).