Linearmotor
Ein Linearmotor (englisch linear motor oder linear synchron motor (LSM)) ist eine elektrische Antriebsmaschine. Anders als die verbreiteten rotierenden Maschinen versetzt ein Linearmotor die von ihm getriebenen Objekte nicht in eine drehende Bewegung, sondern schiebt sie auf geradliniger oder gekurvter Bahn (Translationsbewegung). Der Begriff des Linearmotors wird auch für Antriebe verwendet, bei denen der bewegliche Teil („Läufer“) sich dreht, aber nur zum Teil vom feststehenden Stator umgeben ist (zum Beispiel Plattenteller- oder Waschtrommelantriebe). Antriebe für Linearbewegungen wie Schwingspulen, deren Prinzip keine verschiedenen Kräfte oder Geschwindigkeiten zulässt, werden nicht als Linearmotoren bezeichnet, sondern nur unter dem weiteren Begriff Linearaktor mit den Linearmotoren zusammengenommen.
Der Linearmotor wurde vor dem rotatorischen Motor erfunden. 1854 ließ Charles Grafton Page einen Solenoid-Linearmotor mit Schubkurbel patentieren (US-Patent 10480 „Improvement in electro-magnetic engines“). Die Maschine war für den Antrieb von Lokomotiven gedacht.
Funktionsprinzip
Direkte Erklärung
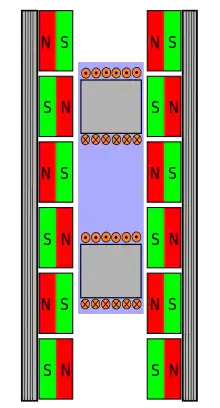
Die Magnetfelder des Läufers und die Magnetfelder des Stators („Fahrweg“) werden immer so kombiniert (die Elektromagnete werden entsprechend gepolt mit Strom versorgt), dass der Läufer ein Wegstück „nach vorne“ gezogen wird (und vom Magnetfeld hinter sich abgestoßen wird). Hat er die Position erreicht, zu der er gezogen wurde, so wird umgepolt, und der Läufer wird von dieser Position nun weggedrückt und zur nächsten Magnetspule/Permanentmagnet hingezogen. Dadurch, dass der Läufer zwei etwas versetzte Magnetfeld-Erzeuger besitzt, befindet sich immer mindestens einer davon gerade „auf halbem Weg“, was eine Festlegung der Laufrichtung (vorwärts oder rückwärts) ermöglicht.
Abgeleitet vom Rotationsmotor
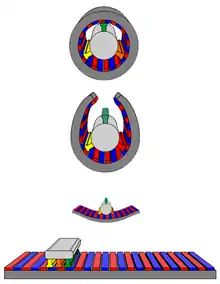
Grundsätzlich könnten rotative Motoren aller Prinzipien durch eine Projektion, die den runden Luftspalt auf eine Gerade abbildet, in Linearmotoren verwandelt werden, wobei die ursprünglich kreisförmig angeordneten elektrischen Erregerwicklungen (Stator) auf einer ebenen Strecke angeordnet sind. Der Läufer, der im Drehstrommotor rotiert, wird beim Linearmotor von dem längs bewegten Magnetfeld über die Fahrstrecke gezogen. Daher rührt auch die vielfach verwendete Bezeichnung Wanderfeldmaschine.
In der Praxis werden grundsätzlich entweder Drehstrom-Asynchronmaschinen (das Magnetfeld ist nicht fest mit der Bewegung gekoppelt) oder Drehstrom-Synchronmaschinen im weiteren Sinne verwendet (was auch lineare Reluktanzmaschinen und Linearschrittmotoren einschließt). Die Verwendung kommutierter Gleichstrommaschinen ist zwar möglich, aber eher unüblich. Der erforderliche Abstand zwischen Läufer und Linearwicklung kann zum Beispiel mit Rädern oder Luftkissen gehalten werden oder durch Schweben auf einem geregelten Elektromagneten.
Im Gegensatz zu rotierenden bürstenlosen Maschinen wird in Linearmotoren oft (aber nicht zwingend) der aktiv bestromte Teil bewegt, während der passive Teil still steht. Der Läufer (Translator, Schlitten) des Linearmotors entspricht dann topologisch dem Stator der rotierenden Maschine und der Ständer (Stator, Laufbahn, Schiene) entspricht topologisch dem Rotor der rotierenden Maschine.
Einsatz in der Industrie
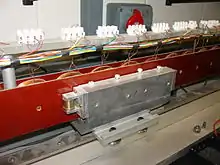
Linearmotoren werden in Werkzeugmaschinen, Positioniersystemen und Handlingsystemen in Bearbeitungszentren verwendet. Herkömmlich werden Vorschubkräfte von einem sich drehenden Elektromotor erzeugt und in einem Getriebe in eine translatorische Bewegung umgesetzt. Die Bewegung wird also indirekt herbeigeführt. Linearmotoren ermöglichen es hingegen, direkt eine translatorische Bewegung darzustellen, man nennt sie deswegen auch Direktantriebe.
Linearmotoren haben in diesem Bereich den Vorteil hoher Beschleunigungen von bis zu 6g und von Verfahrgeschwindigkeiten bis 800 m/min (48 km/h). Die maximalen Kräfte, die mit asynchronen Polysolenoid-Linearmotoren erreicht werden, liegen derzeit bei 30 kN. Für das Erreichen noch höherer mechanischer Kräfte werden ebenfalls Konzepte mit gekühlten, supraleitenden Spulen entwickelt. Außerdem sind sie wegen der wenigen aufeinander reibenden Teilen besser für einen Einsatz in Reinräumen geeignet.
Linearmotoren werden auch häufig in Positioniergeräten oder verschiedenen anderen Maschinenarten, etwa bei Ultraschallmikroskopen, Plasmaschneidanlagen, Laserschneidanlagen und Wasserstrahlschneidanlagen, eingesetzt. Linearmotoren eignen sich auch als Pumpen für flüssige Metalle (zum Beispiel Natriumkreislauf in Atomkraftwerken), wobei die Spulen fest montiert sind und das flüssige Metall als Läufer im Durchlaufrohr in Bewegung bringen.
Linearmotoren werden auch für Bahnantriebe (Transrapid/RailCab, HSST oder auch Achterbahnen) eingesetzt.

Verstärkt werden Linearmotoren wegen der vielen konstruktiven Vorteile mittlerweile in Haushalts-Elektro-Kleingeräten wie elektrischen Zahnbürsten, elektrischen Rasierern, Mundduschen eingebaut. Als Stator kommen hierbei Magnete aus Neodym-Eisen-Bor zum Einsatz.
Einsatz in der Technik der Datenverarbeitung
Mit dem sogenannten „Winchester-Plattensystem“ IBM-3340 kamen Linearmotoren als Ersatz für die bisherigen hydraulischen Antriebe der Festplattenansteuerung zum Einsatz.[1]
Bei einigen teureren CD-Spielern wird das Abtastsystem ebenfalls mit einem Linearmotor angetrieben.
Fachliteratur
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag Europa-Lehrmittel, Wuppertal 1989, ISBN 3-8085-3018-9.
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten 1990, ISBN 3-8085-5002-3.
- Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 8. Auflage, Vogel Buchverlag, Würzburg 1990, ISBN 3-8023-0725-9.
Weblinks
- Supraleitende Linearmotoren (Memento vom 28. Oktober 2006 im Internet Archive) (PDF; 611 kB)
- Applet zur Visualisierung des Feldes in einer Asynchron-, Synchronmaschine, bzw. in einem Linearmotor
- Flash-Animation zum Transrapidsystem
- Linearantriebe bei Achterbahnen – Artikel mit Prinzipanimationen
Einzelnachweise
- Kurt Gerecke und Klemens Poschke: IBM Storage System Kompendium (eingesehen am 29. Oktober 2012).