Differentieller Widerstand
Für Widerstände und andere zweipolige passive elektrische Bauelemente, für die sich zeitunabhängig eine Spannung aufgrund einer Stromstärke angeben lässt, ist die physikalische Größe Elektrischer Widerstand definiert als das Verhältnis Spannung zu Stromstärke. Daneben wird der differentielle Widerstand definiert als die Änderung der Spannung in Bezug auf eine zugehörige (differentiell) kleine Änderung der Stromstärke.[1][2] Diese Bauelemente haben eine Kennlinie, die in einem kartesischen -Koordinatensystem durch dessen Nullpunkt geht. In der Idealisierung eines ohmschen Widerstandes ist diese Kennlinie eine Gerade, und der elektrische Widerstand ist eine Konstante, die für jede Stromstärke gilt. Für die übrigen passiven Bauelemente können Widerstand und differentieller Widerstand an jedem Punkt der Kennlinie anders sein.



Zweipolige Bauelemente, deren Kennlinien nicht durch den Nullpunkt gehen, sind Energiequellen. Ihr Verhalten wird meistens anhand einer Ersatzschaltung aus einer idealen Strom- oder Spannungsquelle und passiven Bauelementen mit deren Eigenschaften beschrieben.
Der differentielle Widerstand kann gemessen oder aus der Ableitung der Kennlinie am gewünschten Punkt berechnet werden. Er wird verwendet, um das Kleinsignalverhalten von Bauelementen zu beschreiben.
Linearer Widerstand
Für manche Materialien wie Metalle gilt in guter Näherung, dass sich bei Erhöhung der Spannung um einen beliebigen Faktor α auch die Stromstärke um denselben Faktor α erhöht. Dann ist der Quotient

für alle Messpunkte gleich und heißt linearer Widerstand . In diesem Fall besteht zwischen Widerstand und differentiellem Widerstand kein Unterschied. Gilt die Gleichung für beliebige Augenblickswerte, heißt der Quotient auch ohmscher Widerstand.

Nichtlinearer Widerstand

– der Widerstand der Steigung der Ursprungsgeraden durch diesen Punkt,
– der differentielle Widerstand der Steigung der Tangente an diesem Punkt.
Bei einer nichtlinearen Spannungs-Stromstärke-Kennlinie ist der Quotient für ein Spannungs-Stromstärke-Wertepaar an jedem Punkt anders, weshalb es nicht möglich ist, geschlossen einen Wert anzugeben. In einem Teilbereich, in dem die Kennlinie angenähert geradlinig verläuft, wird der Quotient , der aus kleinen Werte-Änderungen gebildet wird, an jedem Punkt nahezu gleich; somit lässt er sich für den Bereich angeben. Dieser Quotient am jeweils gewählten „Arbeitspunkt“ A der Kennlinie ist der differentielle Widerstand für den Bereich. Er wird im nebenstehenden Diagramm in der Steigung der Tangente anschaulich.


In der Nähe um diesen Punkt kann das Verhalten eines Bauelementes häufig durch sein Kleinsignal-Ersatzschaltbild mit linearen Bauelementen beschrieben werden. Ist einem Gleichstrom ein kleiner Wechselstrom überlagert (oder gleichwertig: ist einer Gleichspannung eine kleine Wechselspannung überlagert), so wird der differentielle Widerstand für die Wechselgrößen auch als Wechselstromwiderstand bezeichnet[3] oder als dynamischer Widerstand.[4] Der durch die Ursprungsgerade veranschaulichte Widerstand heißt entsprechend auch Gleichstromwiderstand oder statischer Widerstand.[5][6]
Berechnung des differentiellen Widerstandes
Lässt sich eine Funktion ausreichend genau angeben, kann der differentielle Widerstand durch den Differentialquotienten berechnet werden:



Wenn beispielsweise für eine Diode bei Betrieb in Durchlassrichtung die Shockley-Gleichung gilt, lässt sich daraus deren Wechselstromwiderstand berechnen zu , wobei die Größen im Zähler Konstanten sind. Da meist ein solcher funktioneller Zusammenhang fehlt, kann nur aus den Differenzen benachbarter Messwertpaare und berechnet werden:




Bei der Wahl der Messwertpaare ist zu beachten:
- Ist ihr Abstand zu groß, wird nicht der Anstieg einer Tangente, sondern der einer Sekante berechnet.
- Ist ihr Abstand zu gering, sorgen die unvermeidlichen Messabweichungen für unrealistische Schwankungen benachbarter Quotienten. Eine Grenzwertbildung mit diskreten Messwerten ist nicht möglich.
Die experimentelle Ermittlung sei am Beispiel einer Z-Diode gezeigt:
- Bei der Stromstärke durch die Z-Diode möge zwischen den Anschlüssen gemessen werden.
- Bei der Stromstärke durch die Z-Diode möge gemessen werden.




Daraus lässt sich berechnen – ein Wert, der erheblich geringer ist als der Quotient aus jedem Messwertpaar. Dieser geringe differentielle Widerstand erklärt, weshalb Z-Dioden zur Spannungsstabilisierung eingesetzt werden: Obwohl sich die Stromstärke vervierfacht, ändert sich die Spannung nur um 2 %.

Anmerkung: Für die Berechnung der thermischen Belastung einer Z-Diode darf in der Formel nicht der (viel zu kleine) differentielle Widerstand verwendet werden; vielmehr wird dazu mit dem mittleren Gleichstromwiderstand gerechnet.


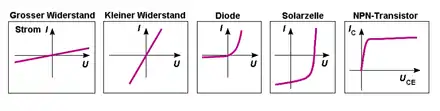
Positiver differentieller Widerstand
Bei positiven differentiellen Widerständen nimmt die Stromstärke mit zunehmender Spannung zu. Die meisten Elemente in der Schaltungstechnik besitzen einen ausschließlich positiven differentiellen Widerstand. Beispielsweise gehören dazu auch Thermistoren, nicht spezialisierte Dioden im Sinne eines p-n-Überganges und npn-Transistoren im Ausgangskennlinienfeld bei konstanter Ansteuerung.[1][7]
Negativer differentieller Widerstand
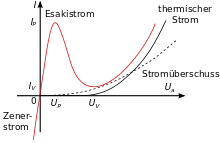
Der differentielle Widerstand kann in einem Teil der Kennlinie negativ sein, so dass die Stromstärke bei steigender Spannung sinkt beziehungsweise die Stromstärke bei sinkender Spannung steigt. Im Bild zur Tunneldiode ist das im Bereich der Fall. Ein negativer differentieller Widerstand kann zum Anregen (Entdämpfen) von Schwingkreisen oder zur Erzeugung von Kippschwingungen verwendet werden, um einen Oszillator zu bauen. So wurden in der Anfangszeit der Funktechnik leistungsstarke Lichtbogensender gebaut. Der negative differentielle Widerstand tritt auch bei Gasentladungen oder bei Bauelementen wie Avalanche- und Tunneldioden sowie Diacs auf, in einfachen elektronischen Schaltungen wie der Lambda-Diode, aber auch bei komplexeren Modulen wie z. B. Schaltnetzteilen auf der Eingangsseite.

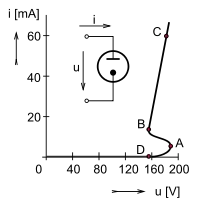
Wird eine Glimmlampe so betrieben, dass die Spannung von null aus ansteigt und den „Umschaltpunkt“ A, an dem der negative differentielle Widerstand beginnt, übersteigt, erfolgt das Umschalten in den anderen Zustand B sehr schnell. Falls dabei der Strom nicht begrenzt wird, wird das Bauelement zerstört. Aus diesem Grund müssen Gasentladungsröhren immer mit einem Vorwiderstand betrieben werden.
Die Umschaltzeit wird durch die interne Kapazität und die Art der Ladungsträger bestimmt:
- Bei einer Gasentladung müssen relativ schwere Ionen einige Millimeter weit bewegt werden, deshalb liegt die Umschaltzeit im Bereich von 10−6 s.
- In einer Tunneldiode werden erheblich leichtere Elektronen nur wenige Mikrometer weit über die Sperrschichten bewegt, weshalb die Umschaltzeit im Bereich von 10−11 s liegt.
Bei Bauelementen mit teilweise fallenden Kennlinien werden in Abhängigkeit von deren Form und damit vom Stabilitätsverhalten zwei grundlegende Typen unterschieden, die wesentlichen Einfluss auf die äußere Beschaltung haben:[8]
- Kennlinien vom Lichtbogentyp sind S-förmig. Da dem Strom eindeutig eine bestimmte Spannung zugeordnet ist, wird sie auch stromgesteuert oder leerlaufstabil genannt. Sie treten beispielsweise beim Lichtbogen und bei der Glimmentladung auf.
- Kennlinien vom Dynatrontyp sind N-förmig. Da der Spannung eindeutig ein bestimmter Strom zugeordnet ist, werden sie auch spannungsgesteuert oder kurzschlussstabil genannt. Sie treten beispielsweise beim Dynatron und bei der Tunneldiode auf.
Anwendungen
- Wird für eine Z-Diode bei und im Datenblatt ein differentieller Widerstand von typisch angegeben, so verursacht eine Spannungserhöhung um 30 mV (≈ ½ %) eine Stromerhöhung um typisch 2 mA (40 %). Der Gleichstromwiderstand (im Beispiel ) ist gegenüber dem differentiellen Widerstand erheblich größer.





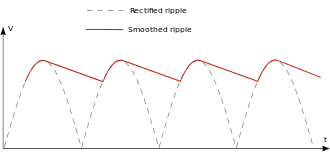
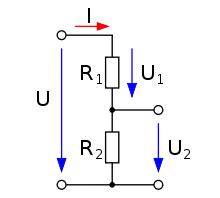

- Wird eine Wechselspannung gleichgerichtet und mit einem Kondensator geglättet, so entsteht die nebenstehend gezeigte Gleichspannung mit einer überlagerten kleineren Wechselspannung (Restwelligkeit). Im darunter gezeigten Spannungsteiler werde durch diese Z-Diode ersetzt und festgelegt. Dann verhält sich der Spannungsteiler für die Gleichspannung wie , dagegen für Wechselspannung wie , wodurch der Wechselspannungsanteil im Verhältnis rund 1:35 stärker heruntergeteilt wird als der Gleichspannungsanteil. Das dient einer weiteren Glättung.




- Bei ausreichend hoher Frequenz lassen sich pin-Dioden als gleichstromgesteuerte Wechselspannungswiderstände mit kurzer Reaktionszeit verwenden.
- In Sperrrichtung lässt nur die sehr geringe Sperrschichtkapazität um 1 pF wenig Wechselstrom passieren.
- In Durchlassrichtung wird der überlagerte Wechselstrom nur wenig durch den geringen differentiellen Widerstand von etwa 1 Ω gedämpft.
- Wird der Durchlassstrom verringert, wirkt die pin-Diode wie ein variabler Widerstand, mit dem sich steuerbare Dämpfungsglieder bauen lassen.
Literatur
- Ralf Kories, Heinz Schmidt-Walter: Taschenbuch der Elektrotechnik. 6. Auflage. Harri Deutsch, 2004, ISBN 3-8171-1734-5, S. 320 – 321.
Einzelnachweise
- Erwin Böhmer, Dietmar Ehrhardt, Wolfgang Oberschelp: Elemente der angewandten Elektronik: Kompendium für Ausbildung und Beruf. Vieweg und Teubner, 16. Aufl., 2010, S. 6, 7
- Rainer Ose: Elektrotechnik für Ingenieure: Grundlagen. Hanser, 5. Aufl., 2014, S. 21
- Wilfried Plaßmann, Detlef Schulz (Hrsg.): Handbuch Elektrotechnik: Grundlagen und Anwendungen für Elektrotechniker. Vieweg+Teubner, 5. Aufl., 2009, S. 394
- Eugen Philippow: Nichtlineare Elektrotechnik (= Bücherei der Hochfrequenztechnik. Band 12). Akademische Verlagsgesellschaft Geest&Portig K.-G., Leipzig 1963, DNB 453767486.
- Wilfried Weißgerber: Elektrotechnik für Ingenieure 1: Gleichstromtechnik und Elektromagnetisches Feld. Springer Vieweg, 10. Auf., 2015, S. 17
- H. Frohne, K-H. Löcherer, H. Müller, T. Harrieshausen, D. Schwarzenau: Moeller Grundlagen der Elektrotechnik. Vieweg+Teubner, 21. Aufl., 2008, S. 33
- Herbert Bernstein: Analoge, digitale und virtuelle Messtechnik. Oldenbourg, 2013, S. 226
- Franz-Heinrich Lange: Signale und Systeme. Band 2. Verlag Technik, Berlin 1968.