Kleinsignalverhalten
Das Kleinsignalverhalten beschreibt das Verhalten eines Systems bei Aussteuerung mit kleinen Signalen, wobei das Wort „klein“ nicht als geringer Abstand zum Nullpunkt, sondern zu einem Arbeitspunkt zu verstehen ist. In einem nichtlinearen Zusammenhang zwischen Eingangs- und Ausgangssignal werden Signale als Kleinsignale bezeichnet, solange sich in einem beschränkten, aber für die Aufgabe wesentlichen Bereich ein dennoch näherungsweise lineares Übertragungsverhalten ergibt.[1]
Dieses Verhalten steht im Gegenüber zum Großsignalverhalten über den gesamten möglichen oder technisch sinnvollen Aussteuerbereich. Der Zusatz „Großsignal“ im Verhalten ist kennzeichnend, dass die Nichtlinearität im Übertragungsverhalten nicht mehr vernachlässigt werden kann.[2] Für die Behandlung der Großsignalaussteuerung wird eine mathematische Beschreibung des nichtlinearen Systemverhaltens benötigt.[3] Eine Alternative zur Ermittlung des Übertragungsverhaltens – bei besonders komplizierten Funktionen – ist eine grafische Lösung.[2] Kennlinien helfen darüber hinaus, das Verhalten und die Aussteuergrenzen zu veranschaulichen.
Die durch den Kleinsignalbetrieb näherungsweise angenommene Linearität ist Voraussetzung für die Anwendung der Laplace-Transformation für die Systemanalyse in der Systemtheorie/Elektrotechnik.
Anwendungsgebiet
Die Beschreibung mittels des Kleinsignalverhaltens wird in der Elektronik angewendet auf das Übertragungsverhalten nichtlinearer Bauelemente und analog-elektronischer Schaltungen, die Transistoren oder andere nichtlineare Halbleiterbauteile enthalten. Ferner wird es in der Regelungstechnik auf das Übertragungsverhalten von Regelstrecken angewendet.
Der jeweilige Arbeitspunkt wird dabei so gewählt, dass weder die Grenzen des Aussteuerbereiches noch stärker nichtlineare Bereiche der Übertragungskennlinie erreicht werden. Durch eine kleine Aussteuerung um den Arbeitspunkt herum ergibt sich näherungsweise ein linearer Zusammenhang zwischen der Eingangs- und der Ausgangsgröße.
Jede Nichtlinearität erzeugt Verzerrung. Es entstehen Oberschwingungen, was gleichbedeutend mit einer Steigerung des Klirrfaktors ist. Die Grenze für das Kleinsignalverhalten ergibt sich aus der Grenze, wie weit die Verzerrung akzeptiert werden kann.
Lineare Näherung
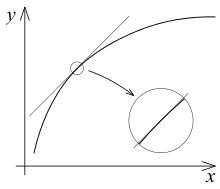

Eine stetig gekrümmte Kennlinie und ihre Tangente an einem willkürlich gewählten Arbeitspunkt stimmen an dieser Stelle im Funktionswert und Anstieg überein. In der Umgebung des Arbeitspunktes gilt die Übereinstimmung noch näherungsweise weiter. Dann kann die Tangente als lineare Näherung dienen.[4][5][6] Sie wird durch eine lineare Funktion dargestellt, deren mathematische Behandlung einfacher ist als die der Kennlinie. Das Verhalten eines Systems im Rahmen der linearen Näherung ist sein Kleinsignalverhalten.
Die Vorgehensweise wird als Linearisierung bezeichnet. Eine nichtlineare glatte Funktion kann durch eine Taylorreihe dargestellt werden. Im Bereich der linearen Näherung kann die Reihe, die am Arbeitspunkt entwickelt wird, nach dem linearen Glied abgebrochen werden. Die Glieder bis zur Abbruchstelle der Reihe sind die mathematische Darstellung der linearen Näherung.[7][8]

Wenn am Arbeitspunkt ist, dann lautet die Gleichung


Darin steht für den Differenzialquotienten von an der Stelle und anschaulich für den Anstieg.



Bis zu welchem Abstand vom Arbeitspunkt die lineare Näherung zulässig ist, hängt ab von der Anforderung an die Genauigkeit. Insbesondere ist die Näherung dann praxistauglich, wenn die Abweichung der Tangente von der Kennlinie dem Betrage nach in der Größenordnung der Abweichungen der Messwerte und Toleranzen der Parameter liegt.
Wenn die Funktion nicht bekannt ist, aber einzelne Punkte auf der Kennlinie bekannt sind (beispielsweise Tabellenwerte), dann wird als lineare Näherung eine geradlinige Verbindung zwischen zwei Punkten verwendet, die einer Sekante entspricht.[9] Bei streuenden Messwerten zu einer linearen Modellfunktion lässt sich eine Ausgleichsgerade berechnen.

- Beispiel Diode
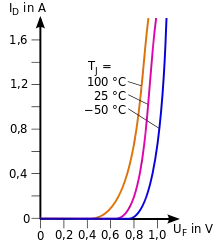
Die Strom-Spannungs-Kennlinie einer Silizium-Halbleiterdiode im Durchlassbereich (für den Diodenstrom bei positiver Spannung ) lässt sich im Wesentlichen durch die Shockley-Gleichung beschreiben.



Für die nichtlineare Funktion ergibt sich am Arbeitspunkt A die lineare Näherung durch den Taylor-Ansatz mit den Arbeitspunkt-Koordinaten und




und nach dem Einsetzen und Differenzieren

Für die Kleinsignalgrößen und wird daraus



Damit entspricht das Kleinsignalverhalten einer Diode dem eines differenziellen Widerstands, dessen Wert umgekehrt proportional zur Stromstärke im Arbeitspunkt ist.

- Beispiel Varistor
Im Durchbruchbereich wird die Kennlinie des Varistors approximiert durch

mit und . Für Zinkoxid-Varistoren liegt typisch im Bereich 30…70. Der differenzielle Widerstand ergibt sich aus




Damit ist der Kleinsignalwiderstand bei jedem Arbeitspunkt im Durchbruchbereich um rund anderthalb bis zwei Zehnerpotenzen kleiner als der Großsignalwiderstand.
Literatur
- Ulrich Tietze, Christoph Schenk: Halbleiter-Schaltungstechnik. 12. Auflage. Springer, Berlin 2002, ISBN 978-3-540-42849-7.
Einzelnachweise
- Wolfgang Reinhold: Elektronische Schaltungstechnik: Grundlagen der Analogelektronik. Hanser, 2. Aufl., 2017, S. 47
- Dietrich Naunin: Einführung in die Netzwerktheorie: Berechnung des stationären und dynamischen Verhaltens von elektrischen Netzwerken. Vieweg, 1985, 2. Aufl., S. 21
- Horst Gad, Hans Fricke: Grundlagen der Verstärker. Teubner, 1983, S. 27
- Manfred Stockhausen: Mathematische Behandlung naturwissenschaftlicher Probleme: Teil 2. Steinkopff, 1980, S. 1
- Matthias Plaue, Mike Scherfner: Mathematik für das Bachelorstudium I: Grundlagen, lineare Algebra und Analysis. Spektrum Akademischer Verlag, 2009, S. 203
- Michael Oberguggenberger, Alexander Ostermann: Analysis für Informatiker: Grundlagen, Methoden, Algorithmen. Springer, 2. Aufl., 2009, S. 144
- Adolf Riede: Mathematik für Biologen: Eine Grundvorlesung. Vieweg, 1993, S. 105.
- Eberhard Zeidler (Hrsg.): Teubner-Taschenbuch der Mathematik. Teubner, 2. Aufl., 2003, S. 667
- Bodo Runzheimer: Lineare Planungsrechnung und Netzplantechnik. Springer, 2. Aufl., 1983, S. 205 f