Modellhubschrauber
Ein Modellhubschrauber ist ein Flugmodell, das einem manntragenden Hubschrauber in Form und Funktion nachempfunden wurde. Dabei ist es in einem deutlich kleineren Maßstab gehalten und kann in den meisten Fällen keine Person tragen. Einige Modelle sind jedoch so ausgelegt, dass sie kleinere Lasten tragen können; so gibt es z. B. spezielle Modellhubschrauber, die mit Kamerasystemen, Messgeräten,[1] Lautsprechern, landwirtschaftlichem Gerät[2] oder gar Rettungsgerät ausgestattet sind. Ferngesteuerte Modellhubschrauber finden somit also nicht nur im Hobbybereich, sondern auch im professionellen Berufsspektrum Verwendung.

Im Gegensatz zum Hubschraubermodell aus Kunststoff oder Druckguss mit hoher maßstäblicher Detailtreue ist ein Modellhubschrauber flugfähig und wird als RC-Helicopter (engl. radio-controlled helicopter) funkferngesteuert,[3] muss aber nicht unbedingt einem großen Vorbild nachempfunden sein. Man unterscheidet zwischen sogenannten Scalemodellen (maßstabsgetreue Nachbildung in Form und Farbe), Semi-Scale (weitgehend maßstabsgetreue Nachbildung mit einigen Detailänderungen), Fun-Scalemodellen (maßstabsgetreue Nachbildung mit Fantasiecolorierung, die es in der Realität nicht gibt) und Trainer-Versionen (Modelle, die es in der Realität so nicht gibt, sondern die eine reine Trainings-, Sport- oder Anwendungsfunktion wie beispielsweise Rettung, Kameraführung und Messungen haben).
Entwicklung


Der erste kommerziell erhältliche Modellhubschrauber, eine Bell Huey Cobra, wurde 1972 von Dieter Schlüter auf der Spielwarenmesse in Nürnberg präsentiert.
Die Verbreitung von Modellhubschraubern hat in den letzten Jahren einen deutlichen Auftrieb bekommen. Neben der Möglichkeit, einen RC-Helikopter bereits für wenig Geld zu erwerben, führten deutliche Leistungssteigerungen, neue Techniken bei Antrieben und Werkstoffen und mehr Zuverlässigkeit sowie eine leichtere Bedienbarkeit zu diesem Phänomen. Insbesondere die Einführung von bürstenlosen Elektromotoren (brushless), Lithium-Polymer-Akkus, Gasturbinen, kohlenstofffaserverstärktem Kunststoff und glasfaserverstärktem Kunststoff geben den Modellen eine hohe Standfestigkeit bei gleichzeitiger Verringerung des Abfluggewichts und stellen ein breites Leistungsspektrum zur Verfügung. Weiterhin gibt es laufend neue Konstruktionen, eine kostengünstige Massenfertigung in fernöstlichen Ländern wie z. B. China, Taiwan oder Südkorea.
Technische Eigenschaften


Die Technik orientiert sich an manntragenden Hubschraubern, Unterschiede sind durch andere physikalische Gegebenheiten bedingt. Als Motorisierung kommen entweder einzylindrige Hubkolbenmotoren auf Nitromethan- oder Benzinbasis, Elektromotoren oder kleine Gasturbinen zum Einsatz. Durch die stark vereinfachte Technik in Verbindung mit wesentlich weniger Abfluggewicht ergeben sich neben Beschränkungen aber auch Vorteile gegenüber dem manntragenden Vorbild, die sich wie folgt darstellen:
- Geringe Größe und Gewicht: relativ stärkerer Einfluss von Aerodynamik und Wind.
- E-Motoren bedeuten vereinfachte Getriebe und Drehzahlregelung im Vergleich zu Verbrennungsmotoren, zudem weniger Vibrationen.
- Elektro-Antriebe (Heckrotor, Koaxial u. a.) sind relativ kostengünstig und effizient, wenngleich bei größeren Modellen recht hohe Kosten für die Akkumulatoren und deren Ladetechnik anfallen können, da der Energiebedarf bei größeren Modellen deutlich höher ist.
- Gyroskope und andere Stabilisierungssysteme ermöglichen eine automatische Stabilisierung um eine oder mehrere Achsen.
- Nutzlast, Transportvolumen und Reichweite spielen meist keine Rolle.
- Geringere Kräfte am Rotor erlauben ggf. den Verzicht auf Schlag- und Schwenkgelenke.
- Der Pilot braucht eine hohe motorische Fähigkeit, um bis zu vier Steuerrichtungen gleichzeitig über zwei Steuerknüppel steuern zu können.
- Kunstflug inklusive Rückenflug (negativer Rotor-Anstellwinkel) ist bei einigen Modellen relativ einfach möglich, was bei manntragenden Hubschraubern nur bedingt bei einigen Typen und nur unter starker Belastung der Mechanik und Rotorblätter möglich ist.
Modelle
Umfassend geeignet sind Modelle mit programmierbaren Steuerungen. Diese bieten sowohl im mechanischen Aufbau, wie auch durch senderseitige oder stabilisierungssystemseitige Softwareeinstellungen die Möglichkeit, Einstellungen in unterschiedlicher Art vorzugeben. Damit lässt sich eine „anfängerfreundliche“ Einstellung für die ersten Flugversuche und später dann, wenn sich der Modellheli in jeder Normalfluglage beherrschen lässt, eine „fortgeschrittene“ Einstellung für den Kunst- oder sogar 3D-Flug vorgeben.

Die sehr billigen Modelle unter 50 EUR haben aktuell bereits eine 3-Kanalsteuerung. Neben der Höhe('Gas') ist die Drehung um die Hochachse steuerbar und über den 'Nick' die Vorwärtsfahrt. Ein klassischer Helikopter ist aber erst mit mindestens 4 Steuerachsen wirklich komplett ausgestattet und auch steuerbar (Höhe, Nick, Roll, Drehen).
Einfache Elektro-Modelle gibt es schon unter 100 EUR, sie zeichnen sich durch ein geringes Gewicht (bis ca. 300 g) aus und sind mittlerweile auch für den Einsteiger zu empfehlen, da diese Modelle aufgrund des geringen Gewichtes bei einem Absturz kaum Schaden nehmen, der falls doch eingetreten dann aber kostengünstig behoben werden kann. In dieser Gewichts-/Preisklasse dominieren zurzeit Koaxialhelis, aber es setzen sich auch zunehmend kunstflugtaugliche pitchgesteuerte Mikrohelikopter durch, da diese unbeschränkter geflogen werden können und somit nicht nur für den Einsteiger, sondern auch für Fortgeschrittene interessant sind. Bezeichnend ist für diese Modelle, die auch als RTF-Modelle, ARF-Modelle oder BNF-Modelle bezeichnet werden, dass sie fast ausnahmslos als Fertigmodelle angeboten werden, die ohne große Veränderungen an den Einstellungen sofort mit einer meist mitgelieferten Fernsteuerung geflogen werden können. RTF bedeutet dabei "Ready to Fly", ARF "Almost Ready to Fly", während BNF "Bind and Fly" bedeutet – also nur eine kompatible Fernsteuerung mit dem Empfänger des Modells gebunden werden muss, um das Modell fliegen zu können. RTF-Modelle können – theoretisch – aus dem Karton heraus geflogen werden, während bei ARF-Modellen noch kleinere Modifikationen vorgenommen werden und/oder einige Teile ergänzt werden müssen und bei BNF-Modellen noch einige Einstellungen am Sender vorgenommen werden müssen.
Es gibt bei Verbrennungsmotoren eine Einteilung in Klassen (30er, 50er, 60er, 90er und 120er Klasse) sowie bei Trainermodellen eine Einteilung in Heckrohrlängenklassen (z. B. 450 mm, 500 mm, 600 mm etc.), die auch bei Elektromodellen von 250 mm bis 800 mm Anwendung findet. Turbinenmodelle werden derzeit nicht in Klassen eingeteilt.
Der Markt der etwas schwereren Modelle um die 1000 g ist sehr unübersichtlich. Hier finden sich Fertigmodelle genauso wie Bausätze, die je nach Hersteller in unterschiedlichen Vorfertigungsgraden geliefert werden. Zudem werden die meisten Modelle in verschiedenen Versionen verkauft. So gibt es teilweise Anbieter, die sieben verschiedene Versionen ihres Modells anbieten – angefangen beim Grundmodell in Kunststoff-Einfachbauweise bis hin zur getunten Vollmetall- und Carbon-Variante mit farbig eloxierten Teilen.
Einen Preissprung nach oben zeigen die Modelle über 1 kg, denn sie benötigen größere Servos und bei E-Modellen zusätzlich Akkus mit höherer Kapazität. Diese Modelle wären aufgrund ihrer Größe und der damit verbundenen relativen Standfestigkeit gegenüber Windböen und höheren Trägheit beim Steuern auch geeignete Einstiegsmodelle. Aber aufgrund des hohen Anschaffungspreises werden sie meist nur von fortgeschrittenen Piloten geflogen, da bei einem Absturz die Ersatzteilpreise entsprechend hoch sind.
Ein weiterer Preissprung ist bei Scale-Modellen und Modellen weit über 5 kg gegeben. Da hier in der Regel neben hochwertigen Mechanik- und Elektronikkomponenten insbesondere aber die Antriebstechnik ins Gewicht fällt und oftmals auch mechanische Sonder- oder sogar Einzelanfertigungen verbaut werden müssen, sind hier Preise über 10.000 € keine Seltenheit. Diese Modelle bedürfen daher äußerster Sorgfalt und werden darum auch nur von Profis geflogen, zumal häufig auch Mehrblattrotorköpfe (drei und mehr Rotorblätter) zum Einsatz kommen, die ohne elektronische Hilfsmittel nur sehr schwer zu beherrschen sind.
Typische Konstruktionen
Drehzahlgesteuert
Bei drehzahlgesteuerten Modellhubschraubern (Fixed-Pitch; kurz: FP genannt) erfolgt die Steuerung des Auftriebs durch Veränderung der Drehzahl der Rotorblätter. Beim FP ist der kollektive Anstellwinkel der Rotorblätter stets gleich, die Steuerung des Auftriebs und damit der Höhe erfolgt hier ausschließlich über die Rotordrehzahl („Gas“). Diese wird bei elektrisch angetriebenen Mini-Modellhubschraubern von einem Steller geregelt, der meistens gemeinsam mit dem Empfänger und dem „Gyro“ (s. u.) in einem Modul vereint ist.
Diese Bauweise spricht träger auf Steuerkommandos an, als die "pitchgesteuerte" Variante, hat aber den Vorteil des einfacheren mechanischen Aufbaus, geringeren Gewichts und ist auch weniger sturzempfindlich. Sie hat sich besonders bei kleinen und günstigen Modellen unter 500 g bewährt. Auch gibt es größere Modelle im Bereich 1,5 kg, die besonders robust sind mit dieser Rotorkonstruktion, so dass hier bei einer unbeabsichtigten Bodenberührung weniger Teile zerstört werden.

Bei nichtkoaxialen Modellen wird dabei der Drehmomentausgleich bzw. die Drehung um die Hochachse über einen Heckmotor geregelt. Da jede Drehzahländerung des Hauptrotors eine Drehmomentänderung bewirkt, muss zwangsläufig auch die Gierachse ständig nachgeregelt werden – was dem Modellpiloten auch deshalb schwerfällt, weil sich die Bezugsachse, anders als bei einem im Cockpit sitzenden Piloten, beim Drehen ändert. Daher werden heute meistens elektronische Drehratensensoren (sog. Gyro, aber selten ein echtes Gyroskop), eingesetzt, die die Gierachse so regeln, dass sich die Orientierung des Rumpfes nicht ändert bzw. sie gleichbehält.
Die Lateral- (vorwärts-/rückwärts- und seitwärts-, auch Nick und Roll-) Bewegung kann durch eine Taumelscheibe gesteuert werden, die von mindestens zwei Servomotoren angelenkt wird. Bei ganz einfachen Konstruktionen wird darauf verzichtet, es ist dann nur die Flughöhe und die Drehung steuerbar.
Pitchgesteuert

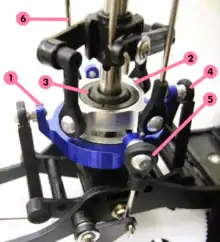
Als Pitch bezeichnet man den Anstellwinkel eines Rotorblatts gegenüber der anströmenden Luft. Die Steuerung des Auftriebs erfolgt klassischerweise durch Veränderung des kollektiven (gemeinsamen) Anstellwinkels der Rotoren (siehe Taumelscheibe); die Drehzahl hingegen bleibt dabei im Idealfall konstant. Die Ansteuerung erfolgt in den überwiegenden Fällen mit drei Servos an der Taumelscheibe, häufig in 120-Grad-Anordnung, bei der die Kräfte sich gleichmäßig auf die Servos verteilen, deren Bewegungen dann aufeinander abgestimmt werden müssen.
Diese Abstimmung der Anlenkungen (Mischung) kann senderseitig durch sogenannte Helimischer oder Taumelscheibenmischer erfolgen. Mittlerweile gibt es aber auch Onboard-Systeme (z. B. das sensorgesteuerte V-Stabi oder andere vergleichbare Systeme), die autark die Taumelscheiben- und Heckrotormischung steuern und darüber hinaus auch ein Dreiachs-Stabilisierungssystem enthalten. Diese Systeme sind inzwischen so effektiv stabilisierend, dass komplett auf die Hilfsrotorebene (Paddel) am Rotorkopf verzichtet und "flybarless" (paddellos), also mit rigidem (=starrem) Rotorkopf geflogen werden kann. Dank dieser Systeme sind mittlerweile Fluggeschwindigkeiten von über 250 km/h mit den Modellen möglich, die mit der Hilfsrotorebene nur schwer erflogen werden können, da sich das Modell dabei stark aufschaukeln würde.
Beim Heckrotor kommen Konstruktionen mit gesondertem Heckmotor, mit Antriebswelle und Umlenkgetriebe oder auch mit Zahnriemen zum Einsatz. Bei auf diese Weise mechanisch gekoppeltem Heckrotor wird die Gierachse über Anstellwinkel-Änderung des Heckrotors gesteuert, was ein weiteres Servo bedingt. Da der Heckrotor die Gesamtausrichtung des Modells um die Hochachse steuert, ist hierfür eine besonders schnelle Reaktionszeit gefragt. Aus diesem Grund werden zur Steuerung des Heckrotors im Idealfall schnellere Servos mit kürzeren Reaktionszeiten verbaut.
Koaxialrotor
Wie bei manntragenden Koaxialrotor-Hubschraubern haben zwei gegenläufige, übereinander angeordnete Rotoren den Vorteil, dass kein Heckrotor zum Drehmomentausgleich gebraucht wird. Vor allem entfällt damit der bei einem Heckrotor verbleibende Drift (siehe dort), was die Steuerung bei begrenztem Platz und in Innenräumen (indoor, also z. B. Hallen) sehr vereinfacht. Indem die Rotoren über zwei getrennte Elektromotoren elektronisch gesteuert werden, kann der Heckmotor bzw. das Heckservo entfallen, da die Gierachse allein über Drehzahlunterschiede der Rotoren steuerbar ist. Sie reagiert jedoch deutlich träger als bei Modellen mit eigenem Heckrotor, was ein Fliegen bei Wind erschwert. Die Auftriebsregelung erfolgt meistens drehzahlgesteuert und nur der untere Rotor wird teilweise via Taumelscheibe zur Nick/Roll Regelung angesteuert. Der konstruktive Aufwand ist damit nicht höher als bei der Heckrotor-Bauweise, allerdings ist die Steuerung schneller zu erlernen.
Bei einfachen Konstruktionen wird auf die Taumelscheibe ganz verzichtet und der Nick über einen kleinen, senkrecht wirkenden Heckmotor geregelt. Bei geringer Fluggeschwindigkeit sind damit auch gezielte Flüge möglich, während das Gewicht des Modells (typischerweise bis etwa 50 Gramm) dabei recht gering und somit im Outdoorbereich wegen der Windverhältnisse kaum geeignet ist.

Tandemrotor
Auch die Tandem-Konfiguration wurde schon im Modellbau eingesetzt. Dabei sind zwei Rotoren meistens hintereinander angeordnet. Dieses bedeutet zwei unabhängige Rotorköpfe und Taumelscheiben mit entsprechend hohem Bauaufwand und hoher Empfindlichkeit. Da die Flugleistung eines Modellhubschraubers und insbesondere seine Nutzlast selten ins Gewicht fallen, wird die Tandem-Bauweise meistens nur eingesetzt, um ein Original möglichst realistisch nachzuempfinden.
Flettnermodelle
Bei Flettnermodellen sind zwei ineinander kämmende Rotoren nebeneinander, manchmal auf zwei Ausliegern, montiert. Diese Modelle sind sehr selten zu finden und in der Regel Selbstkonstruktionen. Das Ineinanderkämmen der Rotoren, das gleichzeitig auch das Drehmoment ausgleicht, wird dabei starr über eine aufeinander abgestimmte Zahnradebene gewährleistet. Der Vorteil eines Flettnermodells ist ein eigenstabiler Flug und eine platzsparende Mechanik.
Mehrfachrotor

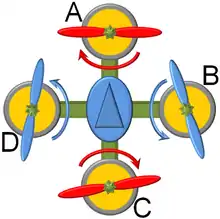
Einen anderen Ansatz verfolgen Designs mit mehreren Rotoren, üblicherweise vier beim Quadrocopter bis hin zu acht beim Octocopter[4]. Dabei wird die Steuerung aller drei Achsen durch unterschiedliche Drehzahlen der Rotoren realisiert. Da die Massen in der Mitte konzentriert sind, fehlt die Eigenstabilisierung eines Hubschraubers. Zur Lagestabilisierung werden daher meistens elektronische Beschleunigungsmesser mit Piezotechnik oder auch Gyroskope eingesetzt. Durch schnell reagierende, von einem Mikrocontroller gesteuerte Elektromotoren kann hier, anders als bei Hubschraubern oder großen Quadrocoptern, auf empfindliche Rotorköpfe mit Blattverstellung verzichtet werden, was Aufbau, Gewicht und Sturzfestigkeit begünstigt. Diese Bauweise wird zunehmend bei UAVs eingesetzt und findet mittlerweile sogar bei Sicherheitsbehörden wie Polizei und Feuerwehr wie auch im militärischen Bereich Anwendung.
Autogyro
Auch Autogyros oder Tragschrauber werden als Modelle gebaut und geflogen. Es handelt sich dabei nicht um Hubschrauber im engeren Sinne, da der Vortrieb durch einen gesonderten Propeller erfolgt, der Auftrieb aber wie beim Helikopter durch einen Drehflügel erzeugt wird, der durch den Luftstrom in Drehung gehalten wird. Bedingt durch diese und durch die mäßige Fluggeschwindigkeit sind Modell-Tragschrauber besonders einfach zu fliegen.
Einblatthubschrauber
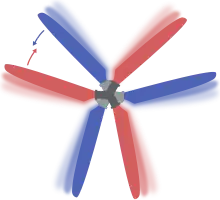
Recht selten anzutreffen sind Einblatthubschrauber (auch engl. Single-Blade-Helicopter), die einen einzigen Rotorkopf haben, an dem auch nur ein einzelnes Rotorblatt angebaut ist. Das Rotorblatt hat eine kleine Verlängerung, die über die Rotorachse der Gegenseite hinausragt und auch mit einem entsprechenden Gegengewicht ausgestattet ist, damit keine Unwucht entsteht und das gesamte System sich beim Starten oder im laufenden Betrieb aufschaukelt.
Tiltrotorsysteme
2011 ist das erste in Massenproduktion gefertigte Tiltrotormodell in Form einer V-22 Osprey-Nachbildung in Deutschland erhältlich gewesen. Da die Kipprotortechnik für den Modellbaumaßstab noch recht aufwändig ist, war das Modell bei seiner Markteinführung um ein Vielfaches teurer, als vergleichbare Pitch- oder Koaxialmodelle in gleicher Größenklasse.
Rahmeninformationen

Abfluggewichte
Das Gewicht eines typischen Elektro-Modellhubschraubers liegt zwischen 50 g (Kleinsthubschrauber mit ca. 20 cm Rotordurchmesser) und 5 kg (ca. 1,50 m). Es gibt aber auch miniaturisierte Eigenkonstruktionen und kommerzielle Kleinmodelle aus der Serienfertigung, die flugbereit sogar unter 10 g wiegen und einen Rotordurchmesser unter 15 cm haben.
Modelle mit Kolbenmotoren beginnen bei etwa 2 kg (30er-Motor, ca. 5 cm³, 1,30 m Rotordurchmesser), die weit verbreiteten Modellhubschrauber mit 90er-Motor (15 cm³, 1,60 m Rotordurchmesser) wiegen ca. 4–5 kg, Scalemodelle mit vorbildähnlichen Rümpfen liegen oft bei 6–12 kg, turbinengetriebene Modelle auch bis zu 25 kg.
Flugzeiten bei Elektromodellen
Die Flugzeit bei Elektro-Modellen beträgt je nach verwendetem Akkutyp und Größe des Akkupacks zwischen 3 und 30 Minuten. Die zur Verbesserung der Flugzeit eingesetzten Lithium-Polymer-Akkus (LiPo und LiIo) haben gegenüber NiCd- bzw. NiMh-Akkus eine höhere spezifische Energie, aber den Nachteil, dass sie bei gleicher Kapazität erheblich teurer sind, weniger Ladezyklen ermöglichen und sorgsamer behandelt werden müssen. LiFePO4-Akkus der neuesten Generation haben eine ähnlich hohe spezifische Energie wie LiPo-Akkus, können auch durch nahezu identisches Ladeequipment geladen werden, sind dabei aber wesentlich unempfindlicher und ermöglichen bis zu 600 Ladezyklen, so dass diese Technik von Fachleuten als zukunftsweisend bezeichnet wird.[5]
Grundsätzlich ist es ratsam, zwischen zwei Flügen die Antriebsmechanik, Motor und Regler abkühlen zu lassen, da diese in Abhängigkeit vom Flugstil sehr heiß werden können und sich bei Unterlassen potenziell die Gefahr einer Fehlfunktion erhöht. Im Umkehrschluss arbeiten diese Komponenten verlässlicher, wenn sie nach dem Flug ausreichend abkühlen können oder während des Fluges entsprechend gekühlt werden und somit gar keine hohen Temperaturen aufbauen können.[6]
Efficient Flying Project
Neue Erkenntnisse in Bezug auf effizienteres Fliegen von Elektro-Helis ergaben zunächst Messreihen mit entsprechendem Equipment (Eagle Tree Datenlogger) an bestimmten Flugmodellen: Demnach ist es für einen ausgewogenen Energiehaushalt und für lange Flugzeiten wesentlich sinnvoller, mit niedrigen Drehzahlen zu fliegen. Bei einer hohen Drehzahl wächst der Strömungswiderstand der Rotorblätter bei gleichzeitig schlechter werdendem Wirkungsgrad rapide an, und vergeudet so Energie, die sich negativ auf die Flugdauer auswirkt und eigentlich keinen Zugewinn beim Fliegen bietet.[7] Das Flugmodell sollte möglichst leicht gehalten werden und muss ein einwandfreies Setup vorweisen, um optimale Voraussetzungen für energieeffizientes Fliegen mitzubringen.
Die Wettbewerbspiloten Matt Finke und Nico Niewind (Heli Masters Gewinner 2010) haben dabei 2009/2010 mit unterschiedlichen Modellen im Rahmen von mehreren Versuchsflügen unter Einbezug von breit gefächerten Flugfiguren eine Flugzeit von über 30 Minuten angestrebt. Unter Berücksichtigung zuvor genannter Aspekte konnten beide die bei Modellen mit bis zu 1,60 m Rotordurchmesser unerreichbar scheinende Grenze von 30 Flugminuten erreichen.[8]
Weitere Rekorde
Außerhalb des Efficient Flying Projects konnte von Wettbewerbspilot Timo Wendtland am 14. September 2013 auf einem FAI-Rekord-Flugwettbewerb in Ballenstedt eine Rekordzeit von 151 Minuten mit einem modifizierten Logo 600 Serienmodell erzielt werden. Das 5,65 kg schwere Modell war mit einem speziell gewickelten Elektromotor und einem 33,8 Ah LiPo-Akku ausgerüstet und schaffte den Rekordflug mit 800er Rotorblättern bei 600/min am Rotorkopf.[9]
Den Dauerflug-Weltrekord hält seit 28. Oktober 2010[10] ein elektrisch angetriebener Quadrocopter, der mehr als 12 Stunden in der Luft gehalten werden konnte. Die Energieversorgung für diesen Rekordflug wurde dabei mittels eines vom Boden abgestrahlten Lasers sichergestellt, der auf Onboard-Solarzellen am Flugmodell gerichtet wurde und somit die Antriebsleistung des Quadrocopters aufrechterhielt. Zusätzlich war das Modell noch mit einem Bordakku ausgestattet, so dass selbst eine kurzfristige Unterbrechung des Lasers folgenlos geblieben wäre.[11]
Flugzeiten bei Modellen mit Verbrennungsmotoren
Bei Verbrenner-Modellen beträgt die Flugzeit typisch 20 Minuten, die aber durch einen größeren Tank erhöht werden kann. Ein höheres Gewicht des Tanks bzw. der mitgeführten Brennstoffmenge kann sich dabei negativ auf die Wendigkeit und damit auf die Kunstflugtauglichkeit auswirken. Mittlerweile zeichnet sich aber auch bei Verbrennermodellen eine Tendenz zu kürzeren Flugzeiten ab, da die Motoren immer leistungsfähiger werden und somit auch einen höheren Kraftstoffdurchsatz haben.
Flugmanöver

Beim Kunstflug mit dem Modellhubschrauber sind eine Vielzahl von Flugfiguren möglich, die mit keinem anderen Fluggerät erreicht werden können. Für diese Anwendung werden pitchgesteuerte Modelle eingesetzt, da diese schneller auf Steuerkommandos reagieren und Kunstflugfiguren mit Rückenlagen ermöglichen. In vielen Ländern werden auch internationale Meisterschaften abgehalten.
Beim Speedflug mit dem Modellhubschrauber geht es darum, das Modell extrem zu beschleunigen und eine hohe Endgeschwindigkeit zu erreichen. Diese Flugart erfordert beim Piloten eine gute Fähigkeit zur Beurteilung der zur Verfügung stehenden Raumaufteilung beim großräumigen Fliegen, da das Modell nur so weit geflogen werden kann, wie es gut sichtbar ist, aber gleichzeitig viel Raum benötigt wird, um das Modell zu beschleunigen. Gute Ergebnisse im Speedflug lassen sich durch einen Sturzflug erzielen, der dann in eine horizontale Flugbahn übergeleitet wird. Zudem wird auch viel Fingerspitzgefühl vom Piloten abverlangt, da kleine Steuerausschläge am Sender bei diesen Geschwindigkeiten große Auswirkungen auf die Flugrichtung und Flughöhe haben können.
Auch für diese Flugart gibt es mittlerweile Wettkämpfe (Speed-Cups). Es können Geschwindigkeiten über 316 km/h erreicht werden.[12]
Ausbildung zum Piloten
Die Kontrolle eines Modellhelikopters setzt ein intensives Training voraus. Da Helikopter nicht eigenstabil fliegen (Ausnahme Koaxialhelis sowie Helis, die mit elektronischen Flughilfen ausgestattet sind), sind ständige Korrekturen erforderlich, die den Einsteiger zu Beginn überfordern. Da Flugfehler im ungünstigsten Fall mit einem Absturz und somit mit Reparaturkosten verbunden sind, gibt es mittlerweile zahlreiche Simulationsprogramme (welche aber wenig mit der Realität zu tun haben, denn in der Realität verhalten sich Hubschrauber anders), die den Einstieg erheblich erleichtern und somit teure Reparaturkosten für abgestürzte Modelle verhindern. Außerdem gibt es Flugschulen, bei denen ein Fluglehrer mit seinem mit dem Schülersender kommunizierenden Lehrersender Flugfehler korrigieren kann. Darüber hinaus sollte ein RC-Pilot entsprechende Literatur und einschlägige Webseiten und Foren studieren, um sich entsprechendes theoretisches Wissen in Bezug auf die Inbetriebnahme eines Modellhelikopters anzueignen, bevor er die ersten Flugversuche unternimmt. Neben Trainingslandegestellen, die insbesondere die für Anfänger schwierige Start- und Landeflugphase erleichtern und ein Umkippen des Modells am Boden oder Bodenkontakt der Rotorblätter verhindern sollen, gibt es inzwischen aber auch technische Hilfsmittel, die Steuerfehler ausgleichen und mittels eines Notknopfes am Sender das Modell in eine günstige Fluglage zurückbringen oder sogar eine eigenständige Notlandung vornehmen.

Als gute Anfänger-Umgebung hat sich das Fliegen in einem geschlossenen Raum (Indoor-Flug oder Hallenfliegen) herausgestellt. Meistens werden hierzu Turnhallen genutzt, mit kleinen Modellen ist auch das Fliegen in einem Wohnzimmer möglich. Durch fehlende wetterabhängige Störungen wie z. B. Wind wird das Fliegen erleichtert, gleichzeitig müssen aber maximale Flughöhe und Wände oder andere Hindernisse beachtet werden. In kleineren Räumen entstehen durch den Rotorabwind Turbulenzen in der Luft, die einen unruhigen Flug verursachen können. Zudem können Abstürze in der Halle aufgrund der harten Bodeneigenschaften zu erheblichen Modellschäden führen.
Besondere Beachtung ist bei den ersten Flugversuchen dabei dem Bodeneffekt, auch Hovering in ground effect (HIGE) genannt, zu schenken. Dieser tritt beim Schwebeflug in geringer Höhe (etwa bis 1,5-facher Rotordurchmesser) auf und äußert sich in einem sehr instabilen Flugzustand, da der Hubschrauber auf seinem eigenen Rotorabwind wie auf einer Kugel steht und ständig seine Lage ändert. Daher sind häufige Korrekturen beim Fliegen notwendig.
FPV (Immersionsflug)
Zunehmend etabliert sich das FPV-Fliegen (engl.: First Person View), auch Immersionsfliegen genannt, in der Szene, also das Fliegen aus der Onboard-Perspektive. Hierbei befindet sich eine in Flugrichtung ausgerichtete Kleinkamera an Bord des Modells und überträgt an den am Boden befindlichen RC-Helipiloten ein Videosignal, das dieser mittels eines kleinen Monitors oder einer Videobrille für sich sichtbar macht. Anhand des Videobildes steuert der Pilot das Modell in die gewünschte Richtung, so dass die sonst geltende Sichtbarriere, bei der das Modell nur so weit geflogen werden kann, wie das Modell vom Boden aus in der Luft sichtbar ist, – theoretisch – überschritten werden kann und nur die Reichweite des Videosignals oder die Reichweite der Fernsteuerung den Flug limitieren. Selbst wenn das Fluggerät außer Reichweite der Fernsteuerung oder des Videosignalempfängers geraten sollte, gibt es bei einigen teureren Modellen mittlerweile GPS-unterstützte Flugmodi, die das Flugmodell in diesem Fall in einen Autopilotenmodus versetzen und es wieder zum Piloten zurückbringen und sogar landen können, ohne dass der Pilot eingreifen muss oder das Modell verloren geht. In Deutschland ist es allerdings nach derzeitiger Rechtsprechung auch im FPV nicht erlaubt, außerhalb der Sichtweite des Modells zu fliegen.[13]
Recht und Versicherungspflicht
Deutschland
Der Aufstieg von Flugmodellen, also auch von Modellhubschraubern, ist in § 16 LuftVO geregelt. Demnach bedarf es einer Aufstiegserlaubnis der zuständigen Landesbehörde, wenn die Modelle
- schwerer als 5 kg sind,
- mit Verbrennungsmotor im Umkreis von weniger als 1,5 km von Wohngebieten geflogen werden sollen oder
- weniger als 1,5 km von Begrenzungen eines Flugplatzes entfernt geflogen werden sollen.
Der Aufstieg auf Flugplätzen bedarf darüber hinaus der Zustimmung der Luftaufsichtsstelle (z. B. Deutsche Flugsicherung – DFS) oder der Flugleitung. Der Aufstieg kann nach § 29 LuftVG untersagt werden, wenn betriebsbedingte Gefahren für die Sicherheit des Luftverkehrs sowie für die öffentliche Sicherheit oder Ordnung vom Betrieb des Modellfluggerätes ausgehen.
Weitere Einschränkungen können sich durch die einzuholende Zustimmung eines Grundstückseigentümers oder sonstigen Nutzungsberechtigten ergeben, wenn auf seiner Liegenschaft geflogen werden soll. Darüber hinaus gibt es Bereiche, über denen nicht geflogen werden darf (z. B. über Atomkraftwerken, militärischen Sicherheitsbereichen und Naturschutzgebieten). Flugmodelle dürfen zudem grundsätzlich nicht innerhalb von Ortschaften geflogen werden.[14] Der private Einsatz von Flugmodellen muss grundsätzlich so erfolgen, dass niemand gefährdet, belästigt oder beeinträchtigt wird.
Neben der Einhaltung der allgemeinen rechtlichen Bestimmungen muss für den Betrieb des Modells auch eine Zusatzversicherung abgeschlossen werden (§ 102 LuftVZO)[15], die sowohl auf den Betrieb des Modells im Freien als auch in geschlossenen Räumen oder Hallen ausgelegt sein muss. Es muss für alle Flugmodelle eine Luftfahrt-Haftpflicht-Versicherung abgeschlossen werden.[16]
Diese Pflichtversicherung für Flugmodelle ist spezieller und weitreichender als eine Privat-Haftpflicht-Versicherung – folglich kann der Betrieb von Flugmodellen nicht über die Privat-Haftpflicht-Versicherung abgedeckt werden.[17] Der Gesetzgeber besteht auf den Abschluss einer Haftpflichtversicherung, da ein abstürzender oder außer Kontrolle geratener Modellhubschrauber erhebliche Personen- oder Sachschäden verursachen kann, die entsprechende Schadensersatzforderungen nach sich ziehen können.
Siehe auch
- World Scenic Flights, mit dem Modellhubschrauber um die Welt – ein preisgekrönter Kurzfilm vom Film- und Stuntteam HeliGraphix
- Pitchlehre, ein Messwerkzeug zum Einstellen des Anstellwinkels für die Rotorblätter eines Modellhubschraubers
- Trainingslandegestell, ein Hilfsmittel, um das Fliegen eines Modellhubschraubers zu erlernen und das Modell vor Abstürzen zu bewahren
- Camcopter S-100, eine Flugdrohne auf Modellhubschrauberbasis
Einzelnachweise/Anmerkungen
- Der britische Physiker Andrew McGonigle aus Sheffield benutzt einen mit Messgeräten ausgestatteten ferngesteuerten Modellhelikopter, um Vulkanausbrüche vorherbestimmen zu können. Der Hubschrauber misst dabei die Kohlendioxid- und Schwefeloxid-Emissionen über dem Vulkan. Vorausgegangen war eine Meßaktion von Vulkanologen am Kraterrand, die hierbei ums Leben gekommen waren, so dass der RC-Helikopter eine ungefährlichere Meßalternative darstellt. → siehe auch: The University of Sheffield; Lethal breath 2008 (Memento vom 24. April 2010 im Internet Archive) rolexawards.com, (Abgerufen am 26. Juni 2010)
- Am 16. September 2011 wurde im Beisein von Ulrike Höfken, der Umweltministerin von Rheinland-Pfalz, ein ferngesteuerter Lastenhubschrauber (FRM-G Waran) mit Flettnerrotorsystem vorgeführt, der zukünftig auf Steillagenweinhängen eingesetzt werden und Pflanzenschutzmittel ausbringen soll. Das rheinland-pfälzische Weinbauministerium förderte die Entwicklung mit 50.000,-€. Der Heli wird manuell per Funkfernsteuerung gesteuert, hat eine durch einen 170 cm³ Zweizylinder-Boxermotor erbrachte Leistung von 14,5 kW zur Verfügung, ca. 2500 mm Rotordurchmesser und wiegt im Konstruktionszustand von 2011 ca. 65 kg. Die Konstrukteure sind dabei bestrebt, zukünftig durch eine Zuladungserhöhung so viel Rebschutzmittel aufnehmen zu können, dass mit einem einzigen Flug größere Flächen beregnet werden können. Zudem soll das System zukünftig noch mit Steuerhilfen ausgestattet werden, so dass ein in Teilbereichen automatisierter Einsatz des Helis möglich ist. Quelle: DMFV Modellflieger Magazin, Ausgabe Dezember 2011, S. 46 und 47.
- Der überwiegende Teil der Modellhubschrauber wird durch Funkfernsteuerungen im 35 MHz oder 2,4-GHz-Bereich betrieben – letzterer hat sich aufgrund einiger Sicherheitsfeatures mittlerweile durchgesetzt, da in diesem Spektrum Modellabstürze durch Betriebsfehler wie Kanaldopplungen nicht mehr möglich sind. Mittlerweile gibt es sogar die ersten Modellhubschrauber, die über ein Onboard-WLAN-System verfügen und sich über ein Mobiltelefon steuern lassen
- Mit zunehmender Rotoranzahl kann auch die Zuladung erhöht werden. So gibt es die ersten Hexacopter in Serienproduktion, die problemlos 1 kg Zuladung (Kameraequipment o.a.) aufnehmen können
- so berichtet in Rotor 7/2010
- Eine ausreichende Kühlung kann darüber hinaus durch Luftschlitze in der Haube oder durch spezielle im Handel erhältliche Kühlrippen oder Lüfter hergestellt werden, wenn zwischen zwei Flügen das Auskühlen der Komponenten entfallen soll. Zu hohe Temperaturen können zum Ausdehnen von Ritzeln führen, was im ungünstigen Fall zum Abbrechen von Ritzelzähnen am Motor oder Getrieberitzeln führen kann.(vgl. Bedienungsanleitung Three Dee Rigid, www.henseleit-helicopters.de). Zu heiße Elektronikkomponenten können zu einem Abschalten oder langsamen Herunterfahren des jeweiligen Bauteils führen (Schmelzschutz) (vgl. Betriebsanleitung von Kontronik High End Hochstrom- und Hochvoltdrehzahlstellern mit sehr starkem BEC bis 12s)
- Gemessen wurden z. B. Schwebeflugmanöver bei 1300/min: 570 W. Bei 2100/min am Rotorkopf wurden bereits 1,5 kW verbraucht. So angeführt in ROTOR 03/2009, S. 28. Das Flugmodell muss dabei aber in der Lage sein, mit diesen niedrigen Drehzahlen fliegen und auch alle Flugmanöver vollziehen zu können. Hilfreich können hierbei Dreiachsstabilisierungssysteme sein
- so berichtet in mehreren ROTOR-Ausgaben 2010 sowie auch anderen in Deutschland erscheinenden Fachzeitschriften. Bisheriger Rekordflug mit einem annähernd 5 kg schweren Modell waren 38 Minuten.
- so angeführt in ROTOR Ausgabe 11/2013, S. 16 ff, zudem nachlesbar auf twheli.de
- siehe portal.mytum.de
- so berichtet in ROTOR-Magazin – Hubschrauber Modellflug. Dezemberausgabe 2010, S. 9.
- Der Modellheli-Pilot Robert Sixt hat mit seinem Flugmodell Henseleit Three Dee/Velocity beim Pöting Speed Cup im Jahr 2014 die Ausnahmegeschwindigkeit von 316 km/h erflogen. So auch angeführt in ROTOR August 2014
- so angeführt in RC-Heli-Action, Ausgabe Mai 2013
- Nach §1 Absatz 1 Nr. 9 Luft-Verkehrsgesetz (LuftVG) sind Flugmodelle „Luftfahrzeuge“ im Sinne der luftrechtlichen Bestimmungen. Entsprechend gilt dann hier auch § 1 Luftverkehrs-Ordnung (LuftVO). Nach Absatz 1 der Norm hat sich jeder Teilnehmer am Luftverkehr so zu verhalten, dass Sicherheit und Ordnung gewährleistet sind und kein anderer gefährdet, geschädigt oder mehr als den Umständen vermeidbar behindert oder belästigt wird. Hieraus wird dann hergeleitet, dass ein Betrieb von Flugmodellen in der Ortschaft zu unterlassen ist. Sofern keine Gefährdung, Beeinträchtigung und/oder Belästigung eintreten kann, wäre auch „innerorts“ nichts gegen einen Betrieb kleiner Elektromodelle einzuwenden.
- Die Versicherungspflicht für Flugmodelle ergibt sich aus 102 Luftverkehr-Zulassungs-Ordnung (LuftVZO). Diese ist im Bundesgesetzblatt 2005 Teil I Nr. 47, ausgegeben zu Bonn am 10. August 2005 (2275) veröffentlicht worden.
- Die Versicherungspflicht besteht unabhängig von Größe, Gewicht und Antrieb des Modells. In jedem Falle trifft dies für Modelle zu, die ferngesteuert werden und in Art und Wesen Luftfahrzeugen gleichen. Nicht unter die Versicherungspflicht fallen Spielzeuge, wie zum Beispiel Plastik- oder Schaumstoffflieger, die man mittels eines Katapults durch die Luft bewegt. Die Grenze zum nicht versicherungspflichtigen Spielzeug kann in einigen Fällen fließend verlaufen.
- Eine Ausnahme kann für Flugmodelle mit einem Abfluggewicht von weniger als 1000 g bestehen: einige Modellflugverbände bieten eine Mitgliedschaft an, die eine Versicherung für Flugmodelle unter 1000 g beinhaltet, so dass in diesem Fall keine Zusatzversicherung abgeschlossen werden muss – weder im Freien noch in geschlossenen Räumen oder Hallen.
Literatur
- Dieter Schlüter: Hubschrauber ferngesteuert. 11. Auflage. Neckar-Verlag, Villingen-Schwenningen 1999, ISBN 3-7883-3126-7.
- Dieter Schlüter: Die Geschichte des Modellhubschraubers und andere Erinnerungen. Neckar-Verlag, Villingen-Schwenningen 2007, ISBN 978-3-7883-0695-3.
- Stefan Pichel: Wunderwelt Modellhubschrauber. der Einstieg am Beispiel des T-Rex 450. Books on Demand Verlag, Norderstedt 2008, ISBN 978-3-8370-4520-8.
- Norbert Grüntjens: RC-Elektroheli. In großen Schritten zum Erfolg. Ikarus Grüntjens, Schramberg-Waldmössingen 2006, ISBN 3-00-020372-9.
- Stefan Pichel: Echt abgehoben! – Faszination Modellhelikopter. Books on Demand, Norderstedt 2007, ISBN 978-3-8370-0521-9.
- Georg Stäbe: DMFV-Heli-Fibel II. DMFV-Verlag.
- Gerald Kainberger: Das große Buch des Modellflugs. VTH-Verlag, Baden-Baden 2010, ISBN 978-3-88180-793-7.
- Michal Sip: Das große Handbuch Modellflug. Geramond, München 2008, ISBN 978-3-7654-7348-7.
- Wolfgang Maurer: Heli-Setup-Workbook I & II. Wellhausen & Marquardt Medien, Hamburg 2010, ISBN 978-3-939806-10-3 und ISBN 978-3-939806-11-0.
Weblinks
- Beschreibung des ersten kommerziellen Helis Bell Huey Cobra von Dieter Schlüter
- RHF-Heli Wiki – Technik-Informationen von rc-heli-fan.org
- Helischool – eine virtuelle Flugschule für Modellhubschrauber
- Efficient Flying Project: 30 Minutenflug von Matt Finke
- Team Black Sheep im FPV-Flug über der Costa Concordia
- Ein Modellhubschrauber im landwirtschaftlichen Einsatz