Liste von Trägheitstensoren
Der Trägheitstensor (Formelzeichen , Dimension 1=M L², SI-Einheit 1=kg m²) eines starren Körpers gibt seine Trägheitsmomente an, also den Widerstand des Körpers gegen beschleunigte Drehungen. Der Trägheitstensor spielt für Drehungen eine vergleichbare Rolle wie die Masse für Translationsbewegungen. Er darf nicht verwechselt werden mit dem Flächenträgheitsmoment, das bei Balkenbiegungen verwendet wird.

Die Berechnung des Trägheitstensors realer Körper erfordert die Auswertung von Volumenintegralen, was entsprechend aufwändig ist. Einfacher gestaltet sich die Bestimmung, wenn der Körper aus Teilen zusammengesetzt ist, deren Trägheitstensor bekannt ist. Mit der Regel für die Tensortransformation bei Drehungen und dem Steiner’schen Satz kann dann der Trägheitstensor des Körpers ohne Integrationen ermittelt werden. In den Tabellen unten sind zu diesem Zweck die Trägheitstensoren einiger einfacher Körper mit homogener Massenverteilung aufgelistet.
Berechnung von Trägheitstensoren
In der Tabelle sind die Trägheitstensoren bezüglich des Ursprungs eines kartesischen Koordinatensystems mit Standardbasis angegeben, die hier – wenn nicht anders angegeben – mit dem Hauptachsensystem zusammenfällt. Sofern der Massenmittelpunkt des Körpers im Ursprung liegt, wird der Trägheitstensor mit Is bezeichnet, ansonsten mit I0, und besitzt die Darstellungen


Darin ist
- V das Volumen des Körpers,
- ρ die Dichte,
- Ix,y,z Hauptträgheitsmoment,
- der Ortsvektor mit x, y und z-Koordinaten,
- ⊗ das dyadische Produkt und
- 1 der Einheitstensor.

Ist eine andere rechtshändige Orthonormalbasis, dann ist


der Trägheitstensor mit Hauptachsensystem . Darin ist

ein orthogonaler Tensor. In der letzten Darstellung wurden die Basisvektoren als Spaltenvektoren angesetzt. Mit dem Steiner’schen Satz kann der Trägheitstensor bezüglich eines beliebigen anderen Bezugspunkts berechnet werden:

Darin ist der Abstandsvektor vom Massenmittelpunkt s, der für die Berechnung von Is verwendet wurde. Insbesondere ist hier


wenn der Massenmittelpunkt nicht im Ursprung liegt.

Von zwei Teilkörpern können die Trägheitstensoren addiert werden, wenn sie bezüglich desselben Bezugspunkts aufgestellt wurden. Trägheitstensoren können auch subtrahiert werden, wenn das Volumen des dazu gehörenden Teilkörpers ausgespart werden soll.
Punktmasse
Eine Punktmasse hat keine Trägheitsmomente bezüglich Achsen, auf der sie liegt. Nach dem Steiner’schen Satz verursacht sie jedoch Trägheitsmomente, wenn sie nicht auf der Drehachse liegt.
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
| Punktmasse m bei x=r.[Anm. 1] | 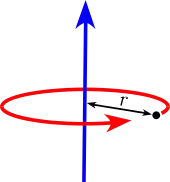 |
|
| Zwei Punktmassen M und m im Abstand a auf der x-Achse und Massenmittelpunkt bei x = 0. |


Stab, Parallelogramm und Quader
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
| Schlanker Stab in x-Richtung mit Länge l und Masse m bezüglich eines Endes.[Anm. 1] | 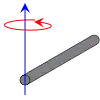 |
m=ρAl mit Querschnitt A≪l² |
| Schlanker Stab in x-Richtung mit Länge l und Masse m bezüglich seiner Mitte.[1][Anm. 1]
Dieser Trägheitstensor entsteht beim massiven Quader unten mit b = h = 0. |
 |
m=ρAl mit Querschnitt A≪l² |
| Dünne rechteckige Platte in der xy-Ebene mit Länge w in x-Richtung, Breite h in y-Richtung und Masse m.[Anm. 1]
Dieser Trägheitstensor entsteht beim massiven Quader unten mit h = 0. |
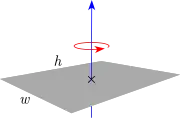 |
m=ρwhd mit Dicke d≪w,h |
| Dünne parallelogrammförmige Platte mit Seite l, Höhe h, „Überhang“ p und Masse m. Mit p = 0 entsteht die Rechteckplatte. Nur dort sind die Hauptträgheitsachsen parallel zu den gewählten Koordinatenachsen. | 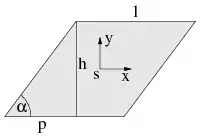 |
m=ρlhd mit Dicke d≪l,h |
| Massiver Quader mit Länge l in x-Richtung, Breite b in y-Richtung, Höhe h in z-Richtung und Masse m.[1][Anm. 1]
Die Trägheitstensoren dünner Platten oder schlanker Stäbe entstehen durch Nullsetzen einer bzw. zweier Dimensionen b, h oder t. |
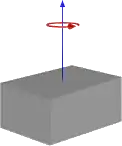 |
m=ρlbh |





- Die Ausrichtung der Drehachse ist – anders als im Bild dargestellt – beliebig.
Kreisscheibe, Volltorus und Kugel
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
| Dünner Kreisring mit Radius r und Masse m.
Dies ist der Spezialfall des Volltorus mit a = 0 und des zylindrischen Rohres mit offenen Enden mit r1 = r2 sowie h = 0. |
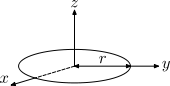 |
m=ρ2πrA mit Querschnitt A≪r² |
| Dünne Scheibe mit Radius r und Masse m.
Dies ist der Spezialfall eines massiven Zylinders mit h = 0. |
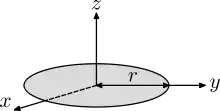 |
m=ρπr²d mit Dicke d≪r |
| Volltorus mit großem Kreis in der xy-Ebene und Radius b, Radius des kleinen Kreises a und Masse m.[1] | .png.webp) |
m=ρ2π²a²b |
| Kugel mit Radius r und Masse m.[1] | 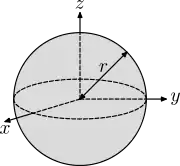 |
Dicke d≪r |
| Halbkugel (Kugel von der xy-Ebene halbiert) mit Radius r, Masse m und Schwerpunktsabstand z=3r/8 von der Schnittebene.[1]:12, 31 | ||
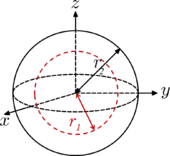
| Hohlkugel mit Außenradius r2 und zentrischem kugelförmigen Hohlraum mit Radius r1 sowie Masse m.[1]
Mit dem Innenradius r1 = 0 entsteht der Spezialfall der massiven Kugel. Aus r1 = r2 entsteht wegen der Spezialfall der dünnwandigen Kugel. |
 |
[3] |
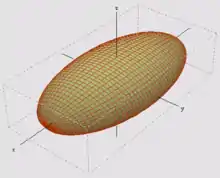
| Massives Ellipsoid mit Halbachsen a, b, c in x-, y- bzw. z-Richtung und Masse m.
Mit a = b = c entsteht eine massive Kugel mit Radius a. |
 |








Dreiecksscheibe und Pyramide
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
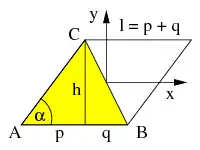
| Dünne Dreiecksscheibe mit Höhe h, Grundseite l = p + q sowie Masse m. Nur bei Symmetrie mit p = q sind die Hauptträgheitsachsen parallel zu den gewählten Koordinatenachsen. |  |
m=½ρh(p+q)d mit Dicke d≪h,p+q |
| Rechteck-Pyramide mit Höhe h, Breite a in x-Richtung, Breite b in y-Richtung sowie Masse m bezüglich des Schwerpunkts S.[1] | 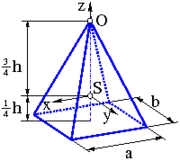
|
|
| Rechteck-Pyramide mit Höhe h, Breite a in x-Richtung, Breite b in y-Richtung sowie Masse m bezüglich der Spitze O. |




Kegel
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
| Gerader massiver Kreiskegel mit Radius r, Höhe h und Masse m bezüglich seines Schwerpunkts.[1] |  |
|
| Gerader Kreiskegel mit Radius r, Höhe h und Masse m bezüglich seiner Spitze.[4] | 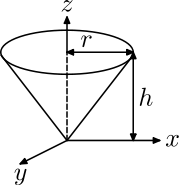 |
Dicke d≪r,h |


Rohr und Zylinder
| Beschreibung | Bild | Trägheitstensor |
|---|---|---|
| Massiver Zylinder mit Radius r, Höhe h und Masse m[1] |  |
|
| Dickwandiges zylindrisches Rohr mit offenen Enden, innerem Radius r1, äußerem Radius r2, Länge h und Masse m[1] | 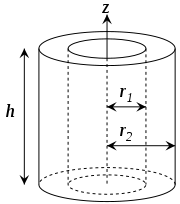 |



Beliebige rotationssymmetrische Körper
Die Berechnung des Trägheitstensors mit Volumenintegralen lässt sich bei Rotationskörpern mit dem Trägheitstensor für die dünne Kreisscheibe und den Steiner’schen Satz vereinfachen, denn dann kann der Körper aus (infinitesimal) dünnen Kreisscheiben zusammengesetzt gedacht werden.
Das Material des Körpers habe die Dichte ρ, seine Figurenachse liege in z-Richtung und die erzeugende Kurve sei durch den Radius r( z ) gegeben. Die Masse der Kreisscheiben mit Dicke t ist an der Stelle z

Um ihren Mittelpunkt hat die Kreisscheibe bei z den Trägheitstensor

Bezüglich des Ursprungs kommt noch der Steiner’sche Anteil

hinzu. Somit entsteht der Trägheitstensor aus dem Integral

über Kreisscheiben der Dicke dz.
Der Trägheitstensor für den geraden Kreiskegel mit Radius r und Höhe h bezüglich seines Massenmittelpunkts entsteht so mit im Intervall [-¼h, ¾h] und seiner Masse .


Platonische Körper
Bei den Platonischen Körpern sind die drei Hauptträgheitsmomente gleich. In der Tabelle ist d≪s die gegenüber der Kantenlänge s geringe Dicke der Seitenflächen und ρ die Dichte.
| Beschreibung | Bild | Trägheitstensor (Diagonalelement) |
|---|---|---|
| Regelmäßiges Tetraeder mit Kantenlänge s und Masse m. | 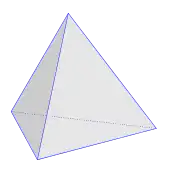 |
[5] |
| Der Würfel ist der Spezialfall des #Quaders mit drei gleichen Seiten s. | .png.webp) |
m=ρs3 |
| Regelmäßiges Oktaeder mit Kantenlänge s und Masse m. | 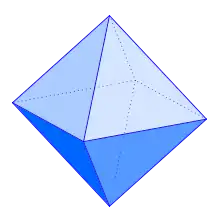 |
[5] |
| Regelmäßiges Dodekaeder mit Kantenlänge s und Masse m. |  |
wobei [5] |
| Regelmäßiges Ikosaeder mit Kantenlänge s und Masse m. |  |
wobei [5] |






Beispiel
Der Trägheitstensor von (unsymmetrischen) Parallelogrammen, Dreiecken und daraus des Tetraeders soll berechnet werden.
Parallelogramm
Der Trägheitstensor eines Parallelogramms kann mit den Trägheitstensoren von in x- und y-Richtung verschobenen Stäben berechnet werden, siehe Bild. Ein Stab in x-Richtung der Länge l, Breite b, Dicke d und Dichte ρ besitzt den Trägheitstensor

Wird dieser in den Schwerpunkt bei (xs, ys) verschoben, addiert sich der Steiner’sche Anteil

Mit xs=ys cotα im Parallelogramm wird daraus:

Integration dieses Trägheitstensors mit Breite b=dy über das Intervall ys ∈ [-½h, ½h] liefert den Trägheitstensor des Parallelogramms:

Mit m = ρ d h l und p = h cotα lautet der Trägheitstensor eines Parallelogramms:

Nur bei p = 0 sind die Hauptachsen parallel zum gewählten Koordinatensystem und es entsteht der Trägheitstensor der Rechteckplatte.
Dreieck
Teilung des Parallelogramms entlang einer Diagonale in zwei Dreiecke mit Masse md = ½ mp liefert deren Trägheitstensor bezüglich des Ursprungs:

Der Schwerpunkt des Dreiecks (gelb) liegt im Schwerpunkt seiner Ecken:

Bei Verschiebung des Schwerpunkts in den Ursprung subtrahiert sich der Steiner’sche Anteil

woraus der Trägheitstensor eines Dreiecks entsteht:

Nur bei Symmetrie mit p = q sind die Hauptträgheitsachsen parallel zu den gewählten Koordinatenachsen.
Die folgenden Spezialfälle sind hervorzuheben:
- Rechtwinklige Dreiecke entstehen mit p q = h² oder p = 0 und q = l.
- Gleichschenklige Dreiecke haben p = q = ½ l.
- Gleichseitige Dreiecke ergeben sich mit p = q = ½ l und h² = ¾ l².
Tetraeder
Der Trägheitstensor des regelmäßigen Tetraeders kann berechnet werden, indem es in gleichseitige Dreiecksscheiben zerlegt wird und deren Trägheitstensoren aufsummiert werden. Die Masse einer gleichseitigen Dreiecksscheibe mit Dichte ρ, Kantenlänge l, Höhe h und Dicke d ist . Damit lautet der Trägheitstensor:


Diese Dreiecksscheibe wird in z-Richtung verschoben was durch den Steiner’schen Anteil

zu berücksichtigen ist. Zusammen genommen lautet der Trägheitstensor der Dreiecksscheibe im Abstand z von der xy-Ebene:

Das Tetraeder hat die Höhe und wenn der Schwerpunkt im Ursprung liegt, dann ist die Grundseite bei und die gegenüberliegende Ecke bei . Daraus ergibt sich die Kantenlänge der Dreiecksscheiben in der Höhe z zu:




Mit diesen Definitionen berechnet sich der Trägheitstensor des Tetraeders als Summe von Dreiecksscheiben der Dicke d=dz:

wobei seine Masse ist.

Literatur
- Karl-Heinrich Grote, Jörg Feldhusen (Hrsg.): Dubbel. Taschenbuch für den Maschinenbau. Springer Vieweg Verlag, Berlin, Heidelberg 2014, ISBN 978-3-642-38891-0, S. B31, doi:10.1007/978-3-642-38891-0 (eingeschränkte Vorschau in der Google-Buchsuche).
- Eric W. Weisstein: Moment of Inertia – Ring. Wolfram Research, abgerufen am 14. Dezember 2016.
- Raymond A. Serway: Physics for Scientists and Engineers. Saunders College Publishing, 1986, ISBN 0-03-004534-7, S. 202.
- Ferdinund P. Beer und E. Russell Johnston, Jr: Vector Mechanics for Engineers. McGraw-Hill, 1984, ISBN 0-07-004389-2, S. 911.
- John Satterly: The Moments of Inertia of Some Polyhedra. In: The Mathematical Gazette. Band 42, Nr. 339. Mathematical Association, 1958, S. 11–13, doi:10.2307/3608345.