Hauptachsentransformation
Die Hauptachsentransformation (HAT) ist in der euklidischen Geometrie ein Verfahren, mit dem man die Gleichungen von Quadriken (Ellipse, Hyperbel, …; Ellipsoid, Hyperboloid, …) durch eine geeignete Koordinatentransformation auf die jeweilige Normalform bringt und damit ihren Typ und ihre geometrischen Eigenschaften (Mittelpunkt, Scheitel, Halbachsen) bestimmen kann. Damit Längen und Winkel bei der Transformation nicht verändert werden, muss man orthogonale Koordinatentransformationen (Drehungen, Spiegelungen, Verschiebungen) verwenden (s. u.). Das wesentliche Hilfsmittel dieses Verfahrens ist die Diagonalisierung einer symmetrischen Matrix mit Hilfe einer orthogonalen Matrix.
Neben der rein mathematisch-geometrischen Bedeutung der Hauptachsentransformation zur Bestimmung des Typs von Quadriken wird sie in zahlreichen Disziplinen der theoretischen Physik sowie in der Informatik und den Geowissenschaften eingesetzt (s. Abschnitt Anwendung).
Einfache Beispiele und Motivation des Verfahrens
Beispiel 1
Dass die Gleichung

den Kreis mit Mittelpunkt und Radius beschreibt, erkennt man, indem man die Gleichung durch quadratische Ergänzung auf die Form bringt.



Beispiel 2
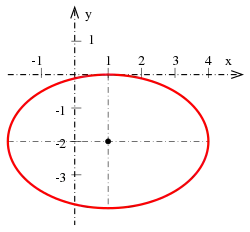
Auch die Gleichung

lässt sich durch quadratische Ergänzung auf die Form bringen und man erkennt, dass es sich um eine Ellipse mit Mittelpunkt und den Halbachsen handelt.



Beispiel 3
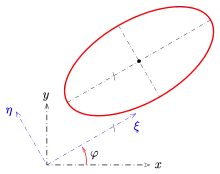
Deutlich schwieriger ist es, der Gleichung

anzusehen, dass es sich um eine Ellipse mit den Halbachsen handelt. Das Problem rührt von dem „gemischten“ Term her. Er ist ein Zeichen dafür, dass die zueinander senkrechten Hauptachsen in diesem Fall nicht parallel zu den Koordinatenachsen sind. Dies lässt sich durch Anwendung einer geeigneten Drehung des Koordinatensystems (um den Nullpunkt) ändern. Der Drehwinkel ergibt sich aus den Koeffizienten bei (s. Kegelschnitte). Dieses anschauliche Verfahren wird aber bei der Untersuchung von Quadriken im euklidischen Raum sehr unübersichtlich. Die Lineare Algebra stellt ein Verfahren zur Verfügung, das in jeder Dimension anwendbar ist: die Diagonalisierung symmetrischer Matrizen. Hierzu schreibt man die Gleichung der Quadrik mit Hilfe einer symmetrischen Matrix: Auf der Diagonalen der Matrix stehen die Koeffizienten von , auf der Nebendiagonale jeweils die Hälfte des Koeffizienten von .






Nun diagonalisiert man die Matrix durch Anwendung einer orthogonalen Koordinatentransformation (Drehung oder Drehspiegelung im ). Bei einer orthogonalen Koordinatentransformation werden Längen nicht verändert, sodass man nach der Transformation und einer eventuell nötigen quadratischen Ergänzung (s. oben) die Längen der Halbachsen und Lagen von Mittelpunkt und Scheitel ablesen kann.


Diagonalisierung einer symmetrischen Matrix (Hauptachsentheorem)
Zu einer symmetrischen -Matrix gibt es immer eine orthogonale Matrix , sodass



eine Diagonalmatrix ist. Die Hauptdiagonale der Diagonalmatrix besteht aus den Eigenwerten der Matrix . Eine symmetrische -Matrix besitzt immer reelle Eigenwerte unter Beachtung der jeweiligen Vielfachheit. Für die Matrix wählt man als Spaltenvektoren orthonormierte Eigenvektoren der Matrix. (Eigenvektoren einer symmetrischen Matrix zu verschiedenen Eigenwerten sind immer orthogonal. Falls ein Eigenraum eine Dimension größer als 1 hat, muss man beispielsweise mit Hilfe des Gram-Schmidtschen Orthogonalisierungsverfahrens eine Orthonormalbasis des Eigenraums bestimmen.) Die Determinante von ist . Damit im ebenen Fall eine Drehmatrix ist, muss man die Orientierungen der benutzten Eigenvektoren so wählen, dass ist.






Interpretiert man die Matrix als lineare Abbildung im , so kann man die Matrix als eine Transformation auf die neue Basis auffassen. Zwischen den alten und neuen Koordinaten besteht die Beziehung . Die Wirkung der Matrix im neuen Koordinatensystem übernimmt die Diagonalmatrix . Eine wichtige Eigenschaft der (orthogonalen!) Matrix ist . Damit lassen sich auch leicht alte Koordinaten in neue umrechnen: .




Die Gleichung einer Quadrik

hat einen quadratischen Anteil , der durch eine (o.B.d.A. symmetrische) Matrix beschrieben werden kann. Mit dem Hauptachsentheorem wird dieser quadratische Anteil in die „Diagonalgestalt“ transformiert. Es kommen danach also keine gemischten Terme mit mehr vor.





Hauptachsentransformation eines Kegelschnitts
Beschreibung der Methode
Ein Kegelschnitt im genügt einer Gleichung
- .

Diese Gleichung lässt sich in Matrizenform so schreiben:
- 1. Schritt
- Setze .
- 2. Schritt
- Bestimme die Eigenwerte der Matrix als Lösungen der Eigenwertgleichung
- . Die Eigenwerte seien .
- 3. Schritt
- Bestimme normierte Eigenvektoren aus den 2 Gleichungssystemen:
- 4. Schritt
- Setze und ersetze durch mit Hilfe von .
- 5. Schritt
- Es ergibt sich die Gleichung des Kegelschnitts in den neuen Koordinaten:
- Da der quadratische Teil in dieser Gleichung durch die Eigenwerte als Koeffizienten und das Verschwinden des gemischten Teils festliegt, müssen nur im linearen Teil die alten Koordinaten x und y ersetzt werden.
- 6. Schritt
- Durch quadratische Ergänzung erhält man die Mittelpunkts- bzw. Scheitelform des Kegelschnitts und kann Mittelpunkt (bei Ellipse, Hyperbel, …) bzw. Scheitel (bei Parabel) und eventuell Halbachsen ablesen.
- 7. Schritt
- Mit Hilfe der Beziehung lassen sich schließlich die --Koordinaten von Mittelpunkt und Scheitel berechnen.














Beispiel 3 (Fortsetzung)
- 1. Schritt
- 2. Schritt
- 3. Schritt
- Ein normierter Eigenvektor zu ergibt sich aus dem linearen Gleichungssystem
- zu .
- Ein normierter Eigenvektor zu ergibt sich aus dem linearen Gleichungssystem
- zu .
- 4. Schritt
- und aus ergibt sich:
- Wegen ist die Transformation eine Drehung und zwar um den Winkel . Letzteres folgt aus (s. Drehmatrix).
- 5. Schritt
- 6. Schritt
- Da in der letzten Gleichung weder noch linear vorkommen, ist keine quadratische Ergänzung nötig.
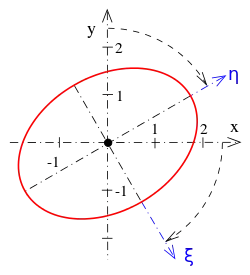
- Ergebnis: Der Kegelschnitt ist eine Ellipse mit Mittelpunkt im Nullpunkt und den Halbachsen . Die Scheitel sind in --Koordinaten:
- 7. Schritt
- Die --Koordinaten der Scheitel sind (s. 4. Schritt):




















Bemerkung: Das neue Koordinatensystem und die Matrix S sind nicht eindeutig bestimmt. Beide hängen von der Reihenfolge der Eigenwerte und der Orientierung der gewählten Eigenvektoren ab. Die Lage des Kegelschnitts (Mittelpunkt, Scheitel) im x-y-Koordinatensystem ist aber durch die gegebene Kegelschnittgleichung eindeutig bestimmt.
Beispiel 4: Hyperbel
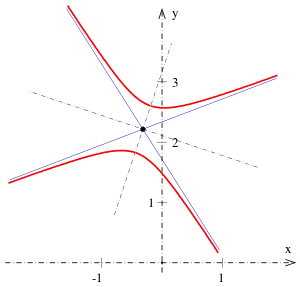
Der Kegelschnitt hat die Gleichung:

- 1. Schritt
- 2. Schritt
- 3. Schritt
- 4. Schritt
- 5. Schritt
- 6. Schritt
- Der Kegelschnitt ist eine Hyperbel mit dem Mittelpunkt und den Halbachsen .
- 7. Schritt









Die x-y-Koordinaten des Mittelpunktes sind (s. 4. Schritt).

Beispiel 5: Parabel
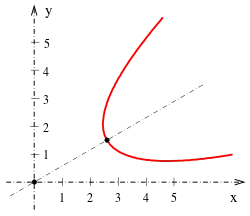
Der Kegelschnitt hat die Gleichung:

Es ist
- .

Die zugehörigen Eigenwerte sind und die Transformationsmatrix ist . In --Koordinaten genügt der Kegelschnitt der Gleichung:



Also ist der Kegelschnitt eine Parabel mit dem Scheitel bzw. in x-y-Koordinaten . Die Matrix beschreibt eine Drehung um den Winkel .



Hauptachsentransformation von Flächen
Die Hauptachsentransformation für Quadriken im Raum läuft nach der gleichen Methode ab wie im ebenen Fall für Kegelschnitte. Allerdings sind die Rechnungen deutlich umfangreicher.
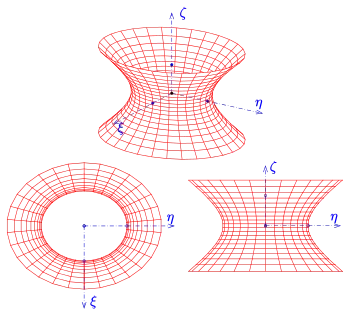
Beispiel: Hyperboloid
Mit Hilfe der Hauptachsentransformation soll festgestellt werden, welche Fläche durch die folgende Gleichung beschrieben wird:
- 1. Schritt
- 2. Schritt
- Die Eigenwerte sind:
- 3. Schritt




Bestimmung der Eigenvektoren:
- zu
- zu
- und zu




- 4. Schritt
- 5. Schritt
- 6. Schritt


Die Quadrik ist ein einschaliges Hyperboloid (s. Liste der Quadriken) mit dem Mittelpunkt im Nullpunkt, den Halbachsen , den Scheiteln und den Nebenscheiteln .



- 7. Schritt
Mit den Beziehungen in Schritt 4 erhält man die Scheitel bzw. Nebenscheitel in x-y-z-Koordinaten: (der Mittelpunkt ist der Nullpunkt).

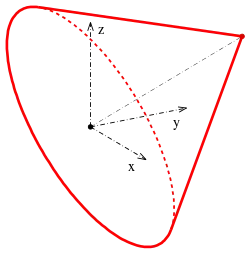
Beispiel: Kegel
Gegeben sei die Gleichung

Mittels Hauptachsentransformation soll diese Gleichung nun in eine Normalform überführt werden und der Typ der durch die Gleichung dargestellten Quadrik bestimmt werden.
- 1. Schritt
- 2. Schritt
- Die Eigenwerte der Matrix sind .
- 3. Schritt


Der Eigenraum zu ist Lösung der (einen!) Gleichung . Es müssen zwei zueinander orthogonale Lösungsvektoren bestimmt werden. Eine Lösung ist . Ein dazu orthogonaler Lösungsvektor muss zusätzlich die Gleichung erfüllen. Offensichtlich erfüllt der Vektor beide Gleichungen. Nun müssen beide Vektoren noch normiert werden:






Ein normierter Eigenvektor zu ist


- 4. Schritt

- 5. Schritt
- 6. Schritt

Quadratische Ergänzung liefert
- .
- Die Quadrik ist ein senkrechter Kreiskegel mit der Spitze im Punkt und der -Achse als Rotationsachse.
- 7. Schritt


Die Spitze ist in x-y-z-Koordinaten der Punkt . Die Kegelachse hat die Richtung .


Hauptachsentransformation in beliebiger Dimension
Eine Quadrik im ist (analog zu n=2) die Lösungsmenge einer allgemeinen quadratischen Gleichung (s. Quadrik):


wobei eine symmetrische Matrix und sowie Spaltenvektoren sind.



Die Hauptachsentransformation in diesem allgemeinen Fall läuft nach dem gleichen Schema ab wie für Kegelschnitte (s. o.). Nach der Diagonalisierung wird allerdings oft noch eine Verschiebung des Nullpunktes in den Mittelpunkt oder Scheitel der Quadrik vorgenommen, so dass die Normalform der Quadrik entsteht, an der man die Art und Eigenschaften der Quadrik ablesen kann.
Anwendung
In der theoretischen Physik wird die Hauptachsentransformation in der klassischen Mechanik zur Beschreibung der Kinematik starrer Körper verwendet: Hier können über eine Hauptachsentransformation des Trägheitstensors, der die Trägheiten des Körpers bezüglich Drehungen um verschiedene Achsen angibt, eventuell vorhandene Deviationsmomente – zum Beispiel bei einem Kreisel – zum Verschwinden gebracht werden.
Ein Deviationsmoment ist ein Maß für das Bestreben eines starren Körpers, seine Drehachse zu verändern. Deviationsmomente werden mit den Trägheitsmomenten in Trägheitstensoren zusammengefasst, wobei die Trägheitsmomente sich auf der Hauptdiagonalen des Tensors, die Deviationsmomente auf den Nebendiagonalen befinden. Wie oben gezeigt, kann der symmetrische Trägheitstensor auf eine Diagonalform gebracht werden. Die durch die Hauptachsentransformation festgelegten Achsen des neuen, angepassten Koordinatensystems bezeichnet man als Hauptträgheitsachsen, das neue Koordinatensystem als Hauptachsensystem. Die Diagonalelemente des transformierten Tensors werden konsequent Hauptträgheitsmomente genannt.
Auch in weiteren Teilgebieten der klassischen Mechanik wird die Hauptachsentransformation eingesetzt, so zum Beispiel in der Festigkeitslehre zur Berechnung der Hauptspannungen, die auf einen Körper einwirken. Häufig angewandt werden Hauptachsentransformationen weiterhin in der relativistischen Mechanik zur Basisdarstellung der Raumzeit im vierdimensionalen Minkowski-Raum oder zum Beispiel in der Elektrostatik beim Quadrupolmoment und anderen höheren Multipolmomenten.
Außerdem ist die Hauptachsentransformation in der multivariaten Statistik ein Teil der Hauptkomponentenanalyse, die vor allem in der Bildverarbeitung auch als Karhunen-Loève-Transformation bezeichnet wird. Manchmal werden die Begriffe synonym gebraucht, doch sind beide Transformationen nicht identisch.[1]
Praktisch wird die Hauptachsentransformation als Teil der Hauptkomponentenanalyse dazu verwendet, die Größe umfangreicher Datensätze ohne wesentlichen Datenverlust zu vermindern. Dabei werden vorhandene Beziehungen zwischen einzelnen statistischen Variablen durch Überführung in ein neues, linear unabhängiges problemangepasstes Koordinatensystem so weit wie möglich reduziert. Beispielsweise kann die Anzahl der benötigten Signalkanäle verringert werden, indem diese nach Varianz geordnet und die Kanäle geringster Varianz gegebenenfalls ohne relevanten Datenverlust aus dem Datensatz entfernt werden. Dadurch können Effizienz und Ergebnis einer späteren Analyse der Daten verbessert werden.[2]
In der elektronischen Bildverarbeitung wird die Reduktion der Datensatzgröße durch Hauptkomponentenanalysen besonders in der Fernerkundung durch Satellitenbilder sowie den zugehörigen naturwissenschaftlichen Disziplinen der Geodäsie, Geographie, Kartografie und Klimatologie eingesetzt. Hier kann die Qualität der Satellitenaufnahmen durch Unterdrückung des Rauschens mittels Hauptkomponentenanalyse deutlich verbessert werden.[3]
In der Informatik wird die Hauptachsentransformation vor allem bei der Mustererkennung, zur Schaffung künstlicher neuronaler Netze, einem Teilgebiet der künstlichen Intelligenz, zur Datenreduktion angewandt (s. Hauptkomponentenanalyse).[3]
Literatur
- Burg & Haf & Wille: Höhere Mathematik für Ingenieure. Band II (Lineare Algebra), Teubner-Verlag, Stuttgart 1992, ISBN 3 519 22956 0, S. 214, 335.
- Meyberg & Vachenauer: Höhere Mathematik 1. Springer-Verlag, 1995, ISBN 3 540 59188 5, S. 341.
- W. Nolting: Grundkurs Theoretische Physik 1: Klassische Mechanik. 7. Auflage. Springer, Berlin 2004, ISBN 3-540-21474-7.
- T. Fließbach: Mechanik. 2. Auflage. Spektrum, Heidelberg 1996, ISBN 3-86025-686-6.
- W. Greiner: Theoretische Physik. Band 2. Mechanik Teil 2. 5. Auflage. Harri Deutsch, Thun / Frankfurt am Main, 1989, ISBN 3-8171-1136-3.
Einzelnachweise
- Vgl. Skript Mustererkennung. Kap. 5.2: Karhunen-Loeve-Transformation. (PDF) Laboratorium für Nachrichtenverarbeitung, Universität Hannover.
- Gesellschaft für Datenanalyse und Fernerkundung Hannover. (Memento vom 10. Juli 2009 im Internet Archive).
- Probabilistische Hauptachsentransformation zur generischen Objekterkennung. (Memento vom 18. Juli 2007 im Internet Archive) (Postscript). Diplomarbeit im Fach Informatik, Friedrich-Alexander-Universitat Erlangen-Nürnberg.