Computerassistierte Chirurgie
Computerassistierte Chirurgie (englisch computer assisted surgery, CAS), manchmal auch englisch computer aided surgery, repräsentiert ein chirurgisches Konzept, um chirurgische Eingriffe mit Computerunterstützung zu planen und ihre Ausführung zu steuern. Synonyme sind computergestützte Chirurgie, computergestützte Intervention, bildgeführte Chirurgie und chirurgische Navigation. Bei einer CAS erhält der Operateur ständig Informationen, wo genau seine Instrumente im Körper des Patienten sich befinden, auch wenn er sie nicht direkt sehen kann. Die Anlagen übertragen dazu das Echtzeit-Tracking der Instrumente in ein vorher aus Schnittbildern vorbereitetes dreidimensionales Modell des Operationsgebietes. CAS wird vor allem für minimalinvasive Eingriffe verwendet, ist aber auch ein wichtiger Faktor bei der Entwicklung der Roboterchirurgie.

Grundlagen
Modell des Patienten
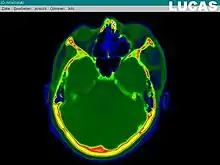
Wichtigster Bestandteil von CAS ist die Entwicklung eines präzisen Modells des Patienten. Dies kann durch bildgebende Verfahren wie Computertomographie, Magnetresonanztomographie, oder Ultraschall geschehen. Die Aufnahmen werden heute in der Regel schon digital erstellt und müssen nicht mehr eingescannt werden. Es ist sinnvoll, mehrere Modalitäten zu kombinieren. Beispielsweise sind MR-Bilder sehr kontrastreich, aber nicht geometrisch genau; CT-Daten sind dagegen strecken- und winkeltreu im Rahmen der Auflösung des verwendeten Scanners. Die Bilder können parallel nebeneinander präsentiert oder optisch überlagert werden (Datenfusion). Die Fusion kann halb- oder vollautomatisch erfolgen. Ziel ist ein 3D-Datasets, der die exakte räumliche Lage der normalen und krankhaft veränderten Gewebe und Strukturen der Zielregion wiedergibt. Die Bildanalyse schließt die Bearbeitung des 3D-Modells des Patienten ein, um die relevanten Informationen zu extrahieren. Durch die unterschiedlichen Kontraststufen der verschiedenen Gewebe kann zum Beispiel ein Modell so geändert werden, dass nur feste Strukturen wie Knochen gezeigt werden, oder aber der Verlauf der Arterien und Venen durch das Gehirn sichtbar ist.
Diagnose, präoperative Planung, Simulation
Ein Datensatz kann zum Beispiel Daten von 180 CT-Schichten enthalten, 1 mm dicke Schichten in 1 mm Abstand mit jeweils 512 × 512 Pixel. Die Details sowohl der weichen als auch der festen Gewebestrukturen können automatisch segmentiert und dann optisch getrennt dargestellt, z. B. farblich markiert oder dreidimensional freigestellt werden. Von Hand werden Orientierungspunkte („land marks“) gesetzt, um in der Lage zu sein, zu einem späteren Zeitpunkt den virtuellen Datensatz neu auszurichten und mit der Situation während der Operation abzugleichen (Bildregistrierung).
Professionelle medizinische Betrachtungssoftware (DICOM-Viewer, z. B. OsiriX) kann den segmentierten und markierten Datensatz des Patienten als virtuelles 3D-Modell wiedergeben. Dieses Modell kann rotiert, beschnitten und gefiltert werden, um dem Chirurgen Ansichten aus jedem möglichen Blickwinkel und jeder Tiefe zu liefern. So kann der Chirurg den Fall besser beurteilen und eine genauere Diagnose stellen. Dann wird die chirurgische Intervention geplant und virtuell simuliert, bevor die eigentliche Operation stattfindet. Steht ein Operationsroboter zur Verfügung, wird er nun programmiert, die geplanten Aktionen während des aktuellen chirurgischen Eingriffs durchzuführen.
Eingriff
Beim Eingriff sieht der Chirurg in Echtzeit, wie sein Instrument ausgerichtet ist und wo es sich im dreidimensionalen Patientenmodell befindet. Meist hat er dazu einen Monitor; es gibt aber inzwischen auch innovative Systeme mit Datenbrillen (Augmented Reality). Die Instrumente werden beispielsweise optisch verfolgt, indem man daran angebrachte Markierungen im infraroten Licht aus mehreren Raumrichtungen verfolgt, oder über elektromagnetische Sender. Mechanische Tracking-Systeme (Achsen und Scharniere mit Sensoren) sind zu ungenau und nicht mehr gebräuchlich.
Auf diese Weise soll der Operateur die chirurgischen Schwierigkeiten besser bewerten und sein Vorgehen besser festlegen können. Der Eingriff wird präziser, die Redundanz der Handgriffe des Chirurgen verringert. Man verspricht sich auch eine allgemein bessere Ergonomie im Operationssaal; das Risiko von Fehlern soll sich verringern, die Operationszeit verkürzen.
Roboterunterstützte Chirurgie
Chirurgische Roboter sind hochgenaue Industrieroboter, also mechanische Arme, die vom Computer gesteuert werden. Roboterunterstützung besteht immer aus dem Zusammenspiel des Chirurgen und des Roboters; selbsttätig operierende Roboter gibt es bisher nicht. Nach dem Grad der Interaktion unterscheidet man telechirurgische, shared-control-, und beaufsichtigte (supervised-controlled) Roboterchirurgie. Beaufsichtigte Eingriffe werden nach ausführlicher Vorbereitung vom Roboter ausgeführt, welcher vorprogrammierte Befehle umsetzt; der Chirurg beobachtet es und kann jederzeit unterbrechen. Bei shared control ("gemeinsame Steuerung") führt der Chirurg das Instrument, während der Roboter es aktiv stabilisiert (z. B. Zittern verhindert oder es von vordefinierten Positionen fernhält). Bei der Telechirurgie steuert der Chirurg die Roboterarme selbst. Seine Konsole kann dabei direkt neben dem Patienten stehen oder beliebig weit entfernt; selbst auf einem anderen Kontinent.
Anwendungsgebiete

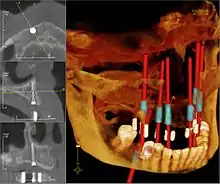
Wichtigstes Einsatzgebiet der CAS ist die Neurochirurgie am Gehirn. Remote Manipulatoren werden dafür schon seit den 1980er Jahren genutzt. In der Kieferchirurgie ist Knochensegmentnavigation ein modernes Konzept bei Operationen am Kiefergelenk oder bei der Gesichtsrekonstruktion.[1] Die navigierte Implantologie ist ein prothetisch-chirurgisches Hilfsverfahren in der Mund-Kiefer- und Gesichtschirurgie und der Zahnmedizin, um Zahnimplantaten exakt in den Kieferknochen einzusetzen. HNO-Chirurgen kennen ebenfalls Gebiete mit eingeschränktem Zugang und der Notwendigkeit hochpräzisen Handelns wie zum Beispiel bei der Mittelohr-Chirurgie.[2] Die Computerassistierte orthopädische Chirurgie (CAOS) ist in der Orthopädie weit verbreitet, vor allem im Hüft-[3] und Kniegelenkersatz.[4] Sie ist außerdem nützlich zur Operationsplanung und -führung in der Osteosynthese von verschobenen Knochenbrüchen. In der allgemeinen und gynäkologischen Chirurgie sind Bauchspiegelungen Nutznießer dieses Fortschritts, etwa für die Hysterektomie (Gebärmutterentfernung). In Montreal wurden 1994 mit Mikromanipulatoren Gallenwegsoperationen computergesteuert durchgeführt.[5] In der Herzchirurgie können Steuerungssysteme den Mitralklappenersatz oder die Ventrikularstimulation über kleine Thorakotomien durchführen. In der Urologie helfen chirurgische Roboter bei der Pyeloplastik (Nierenbeckenplastik), bei der Nephrektomie (operative Entfernung einer Niere), und bei Eingriffen an der Prostata.[6][7]
Auch Radiochirurgie (eine Form der Strahlentherapie) erfolgt heute oft unter Einbeziehung von Robotersystemen, etwa dem Cyberknife. Dabei ist ein Linearbeschleuniger auf einem Industrieroboter montiert und wird unter Nutzung der Skelettstrukturen als Bezugsrahmen auf den Tumor ausgerichtet (stereotaktisches Radiochirurgiesystem). Während des Verfahrens wird Röntgenstrahlung verwendet, um das Gerät vor Abgabe der Strahlenbündel akkurat zu positionieren.
Systeme
1989–2007 wurden mehr als 200 CAS-Systeme von verschiedenen Universitäten und Forschungsinstituten entwickelt, praktisch noch experimentelle Geräte. Gegenwärtige handelsübliche Systeme mit Zulassung für die klinische Anwendung sind hauptsächlich StealthStation (Medtronic, USA), EnLite (ein transportables System der Stryker Corporation[8]) und NavSuite (Stryker Corporation), MATRIX POLAR (Scopis medical/ XION, Deutschland), VectorVision (Brainlab, Deutschland), DigiPointeur (Dr. Lombard / Ste COLLIN, Frankreich). Alle außer DigiPointeur und StealthStation nutzen ein optisches IR-Tracking-System. DigiPointeur ist ein elektromagnetisches Tracking-System, und StealthStation nutzt ein elektromagnetisches (PoleStar) oder optisches IR-Tracking-System. Die StealthStation stellt sowohl optische als auch elektromagnetische Tracking-Systeme.
Der erste chirurgische Roboter hieß Äsop (Computer Motion, USA); Aesop 1000 erhielt 1993 in den USA die behördliche Zulassung der Food and Drug Administration (FDA). Es gab mehrfach Verbesserungen und Varianten, wie Zeus oder Hermes.
Das chirurgische System Da Vinci wurde von Intuitive Surgical, einem Zweig des Stanford Forschungsinstituts (USA), entwickelt. Da Vinci ist ein telechirurgisches System, meist verwendet bei laparoskopischen Bauch-OPs. Im Jahr 1997 hatte es die Zulassung von der FDA erhalten und war 2000 der erste Remote Manipulator, der die FDA-Zulassung bekam, Stand-alone-Operation durchzuführen. Nach heftigen Auseinandersetzungen fusionierten schließlich die beiden Hersteller, noch unter der Marke von Intuitive Surgical.
OrthoDoc und Robodoc sind Roboter, entwickelt von Integrated Surgical Systems für die Assistenz in der orthopädischen Chirurgie. Dieselbe Firma hat Neuronate produziert, nutzbar in Verbindung mit OrthoDoc / Robodoc in der Neurochirurgie.
CyberKnife (Accuray Incorporated) ist ein Roboter mit integriertem Linearbeschleuniger, der seit 2001 in der Radiochirurgie verwendet wird.[9]
Neue technologische Verfahren und Geräte können zu neuen und unvorhergesehenen Risiken für den Patienten und/oder das OP-Team führen. Solange sie nicht im Regelbetrieb, sondern experimentell eingesetzt werden, müssen die zuständigen Ethikkommissionen dem Einsatz zustimmen. Die zu Beginn oft sehr teuren Verfahren können nicht überall angeboten werden, sodass sich ethisch die Frage nach gleichberechtigtem Zugang zu medizinischer Versorgung ergibt.
Literatur
- Peter Michael Schlag, Sebastian Eulenstein, Thomas Lange (Hrsg.): Computerassistierte Chirurgie. Elsevier, Urban & Fischer, 2012. ISBN 3-437-59326-9.
Einzelnachweise
- R. Marmulla, H. Niederdellmann: Computer-assisted bone segment navigation. In: Journal of Cranio-Maxillo-Facial Surgery. 26, 1998, S. 347–359. (englisch)
- N. T. Berlinger: Robotic Surgery – Squeezing into Tight Places. In: New England Journal of Medicine, 354, 2006, S. 2099–2101. (englisch)
- Operieren mit 3-D und Navigationshilfe. (Memento vom 13. Mai 2010 im Internet Archive) auf der Webseite des WDR, abgerufen am 2. Mai 2011.
- navigierter Kniegelenkersatz auf der Seite der Kniesprechstunde der Orthopädie des Klinikums Dortmund; abgerufen am 2. Mai 2011.
- Ernst Kern: Sehen – Denken – Handeln eines Chirurgen im 20. Jahrhundert. ecomed, Landsberg am Lech 2000, ISBN 3-609-20149-5, S. 39.
- M. Muntener, D. Ursu, A. Patriciu, D. Petrisor, D. Stoianovici: Robotic prostate surgery. In: Expert Rev Med Devices, 3(5), 2006, S. 575–584. (englisch)
- Bertrand Guillonneau: What Robotics in Urology? A Current Point of View. In: European Urology, 43, 2003, S. 103–105.
- eNlite Navigation System (Memento des Originals vom 12. Februar 2015 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. der Stryker Corporation/USA, abgerufen am 18. September 2011.
- Cyberknife im OP (PDF; 365 kB) abgerufen am 3. Mai 2011.