Navigierte Implantologie
Die navigierte Implantologie ist ein prothetisch-chirurgisches Hilfsverfahren in der Mund-Kiefer- und Gesichtschirurgie sowie der Zahnmedizin, das in der Planung und im operativen Vorgehen zum Setzen von Zahnimplantaten in den Kieferknochen angewendet wird. Als weitere deutschsprachige Bezeichnungen für dieses Verfahren wird der Begriff 3D-geplante und schablonengeführte Implantologie verwendet.[1] Im englischsprachigen Raum sind die Begriffe navigated implantology, navigated surgery, guided-surgery, guided-implantology, computer-assist implantology oder computer-assist surgery gebräuchlich. Es gehört zu den Verfahren der computerassistierten Chirurgie.
Prinzip der navigierten Implantation
Das Prinzip der navigierten Implantation von Zahnimplantaten beinhaltet, dass die Implantatposition sich streng nach der idealen Position des geplanten Zahnersatzes richtet (sogenanntes Backward-Planning). Das Ziel ist dabei eine möglichst präzise Positionierung des Zahnimplantats. Dies setzt folgende Bedingungen voraus:
- Eine auf den jeweiligen Patientenfall bezogene ideale Form und Position der zu ersetzenden Zähne (Wax-up).
- Eine radiologisch sichtbare Kopie des Wax-up in Form einer Scanschablone oder eine digital erstellte Zahnform an der gewünschten Implantatposition.
- Eine präoperative, dreidimensionale Darstellung der Anatomie des OP-Gebiets in Form eines 3D-Röntgenbildes und darin eingeblendet die geplante prothetischen Versorgung.
- Die virtuelle Planung einer optimalen Implantatposition im Bezug zu der gewünschten Zahnform und -position.
- Übertragung der virtuell geplanten Implantatposition in das OP-Gebiet mittels einer Führungsschablone.
Indikationen und Einschränkungen
Die Indikationen und Anwendungseinschränkungen für eine navigierte Implantation sind in den Guidelines der European Association of Osseointegration (EAO)[2] sowie für den deutschsprachigen Raum in der S2-K-Leitlinie der Deutschen Gesellschaft für Zahn-, Mund- und Kieferheilkunde (DGZMK) festgehalten.[3] Die meisten Indikationen beziehen sich auf eine Erweiterung der diagnostischen Möglichkeiten zur dreidimensionalen Darstellung der Kieferknochen und deren Nachbarstrukturen um vor allem bei einem geringen Knochenangebot oder dessen unklarer Darstellung in den konventionellen Aufnahmetechniken eine verbesserte Einschätzung des OP-Gebietes zu ermöglichen. Hinsichtlich jeder Röntgenuntersuchung muss das sogenannte ALARA-Prinzip (As Low As Reasonably Achievable) beachtet werden. Somit soll das bildgebende Verfahren mit der für die jeweilige Fragestellung geringstmögliche Strahlendosis bei suffizienter Abbildungsqualität gewählt und durchgeführt werden.[3] Die Entscheidung für eine 3D-Planung und navigierte Implantation sollte zwingend vor dem Hintergrund erfolgen, dass der Nutzen einer 3D-Aufnahme für den Patienten die zu erwartende Mehrbelastung mit ionisierenden Strahlen überwiegt. Die Notwendigkeit eines Einsatzes der navigierten Implantation hängt von der individuellen Patientensituation ab, aber auch von der Erfahrung des Operateurs.
Klinisches und dentaltechnisches Vorgehen
Wachsmodell
Die vom Zahntechniker zu Beginn der Therapie hergestellte Form der zu ersetzenden Zähne als Wachsmodell oder als digital erstellte Form in einem CAD-Programm wird als Wax-up bezeichnet. Es ist der wichtigste Bestandteil einer prothetisch geführten Implantatplanung. Die Darstellung des angestrebten Behandlungsergebnisses vor Beginn der Therapie ermöglicht es dem Zahnarzt, Oralchirurgen oder Kieferchirurgen, die Möglichkeiten und die Einschränkungen des Behandlungsfalles zu beurteilen und mit dem Patienten zu besprechen. Ausgehend von der angestrebten Form des späteren Zahnersatzes werden die Entscheidungen über die Anzahl und Position der benötigten Implantate getroffen. Auch die Frage, ob zusätzliche Maßnahmen zur Verbesserung des Implantatlagers (Knochenaufbau, Augmentationen) durchgeführt werden müssen, lässt sich durch ein Wachsmodell sicher und vorhersagbar beantworten.
3D-Bilddarstellung
Die Durchführung einer navigierten Implantation von Zahnimplantaten erfordert die Möglichkeit zur dreidimensionalen Bilddarstellung in Form eines Computertomogramms (CT) oder einer digitalen Volumentomografie (DVT).
Aufgrund der deutlich geringeren Kostenstruktur der DVT-Technik gegenüber CT-Systemen hat die Verbreitung der DVT in den chirurgisch-implantologisch tätigen Praxen deutlich zugenommen. Weiterhin wird eine Planungssoftware benötigt, die eine präoperative virtuelle Implantatpositionierung ermöglicht.
Planungssoftware
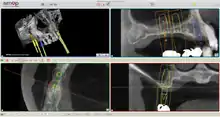
Die meisten Software-Versionen bilden nach der Übernahme der CT- oder DVT-Bilder diese in allen Ansichten und Querschnitten dreidimensional ab. Die Implantate können nun in Bezug auf den vorhandenen Kieferknochen und der geplanten Restauration in idealer Position platziert werden. Dabei ermöglichen hinterlegte Implantat-Datenbanken, dass diese in Typ, Durchmesser und Länge frei wählbar sind. Es können während und nach dem Setzen der Implantate alle Ansichten frei gedreht und aus allen Blickwinkeln betrachtet werden. Ein fast allen Systemen gemeinsames Tool ist die Darstellungs- und Markierungsfunktion der Verläufe des Nervus mandibularis. Einige Programme ermöglichen darüber hinaus die Integration von optischen Oberflächendaten (gescannte Modelle oder optische Abformungen) in die 3D-Röntgendaten.
Scanschablone und 3D-Bildgebung
Die Scanschablone dient zur Ermittlung des knöchernen Angebots am geplanten Implantationsort, sowie zur Beurteilung von Distanzen zu sensiblen Nachbarstrukturen wie Nerven- oder Gefäßverläufen im 3D-Röntgen. Sie wird analog zur Form des Wax-up aus bariumsulfathaltigem Kunststoff angefertigt. Wichtig ist in allen Fällen die sichere und stabile intraorale Abstützung der Schablone. Zur Abstützung geeignet sind die Restbezahnung oder bei vollständiger Zahnlosigkeit zusätzliche Abstützungen in Form von provisorischen Implantaten. Die Abstützung sollte in jedem Fall so gewählt werden, dass eine ungewollte Lageveränderung so sicher wie möglich ausgeschlossen werden kann. Neben der klassischen Herstellung der Führungsschablone aus Kaltpolymerisat oder einer Tiefziehschiene auf einem Gipsmodell können auch CAD/CAM-basierte Systeme zum Einsatz kommen. Bei diesen Systemen wird das Wax-up digitalisiert oder kann direkt in der Software im Surface Tesselation Language (STL) –Dateiformat digital gestaltet werden (digitales Wax-up).
Anschließend erfolgt die Herstellung der Führungsschablone im sogenannten Rapid Prototyping (RPP) -Verfahren. Die Art der RPP-Herstellung variiert zwischen den einzelnen Systemen.
Referenzmarkierung (bariumsulfathaltige Steckbausteine, radioopake Glaskugeln etc.) sind zusätzlich in den meisten Scanschablonen enthalten um später in der Software eine Referenzierung durchführen zu können.
Virtuelle Implantatpositionierung
Der durch die 3D-Aufnahme gewonnene Datensatz (DICOM-Daten) wird in die Planungssoftware eingelesen. Nach der Aufbereitung des DICOM-Datensatzes (entfernen von Artefakten) erfolgt zunächst die Ausrichtung der in der Aufnahme abgebildeten Referenzkörper zu den entsprechenden Referenzkörpern in der Planungssoftware. Anschließend können die geplanten Implantate unter Berücksichtigung der anatomischen Gegebenheiten des Patienten und der angestrebten prothetischen Versorgung optimiert positioniert werden.
Herstellung der Führungsschablone
Die Überführung der virtuellen Implantatposition in eine Führungsschablone für die Implantatbohrer kann auf verschiedene Arten erfolgen. In der Regel verwenden die meisten Systeme sogenannte Positionierer. Die Scanschablone wird dabei auf einem schwenkbaren Bohrtisch montiert, der in seinem Neigungswinkel gegenüber der Bohr- und Positionierungshilfe für die Führungshülsen verändern kann. Analog zum zuvor generierten Koordinatensystem werden pro Implantat die entsprechenden Werte am Positionierer eingestellt und die Führungshülse für jedes Implantat zunächst gebohrt und dann verklebt. Alternativ kann die Bohrschablone auch vollständig im CAD/CAM Verfahren hergestellt werden. Entsprechende Schablonen werden entweder im Stereolithografie-Verfahren oder im 3D-Drucker hergestellt.

Schablonengeführte Implantation
Die Implantatinsertion kann unter bestimmten, günstigen Voraussetzungen auch ohne die Freilegung des Kieferknochens (engl.: Flapless) durchgeführt werden. Nach der Positionierung der Führungsschablone werden die Bohrungen für die Zahnimplantate analog zur zuvor geplanten und in der Bohrschablone festgelegten Position durchgeführt. Dabei werden die Implantatformbohrer durch die Führungshülsen während des Bohrvorganges ausgerichtet. Zusätzlich zu den Bohrungen des Implantatlagers, kann auch die Implantatinsertion durch die Führungshülsen erfolgen, sofern das verwendete Implantatsystem dies vorsieht.
Genauigkeit 3D-geplanter Systeme
Medizinisch soll die navigierte durchgeführte Insertion (Einbringung) eines Zahnimplantats eine größere Genauigkeit in der Positionierung der künstlichen Zahnwurzel ermöglichen. Die meisten derzeit verfügbaren wissenschaftlich erhobenen Daten über die Abweichungen zwischen geplanter und erreichter Implantatposition sind In-vitro-Untersuchungen (Laborstudien) an Modellen oder Humanpräparaten (Leichenteile). Oder es handelt sich um Untersuchungen zu Systemen, bei denen eine zeitgleiche Verfolgung der Position des rotierenden Instruments im Operationssitus (OP-Gebiet) durch eine optische Aufnahmemöglichkeit während des Eingriffs in Form einer röntgenologischen Überwachung erfolgt (sog. Tracking oder dynamische Systeme). Die Genauigkeit lässt sich mit der Abweichung zwischen der geplanten und der erreichten Implantatposition bei 3D-geplanten Systemen abbilden. Hierfür werden folgende räumliche Abweichungen definiert:
- Horizontale Abweichungen am Eingangspunkt der Bohrung in das Implantatlager
- Horizontale Abweichungen am Apex des Bohrers oder des Implantats
- Vertikale Abweichungen der erreichten Implantatposition
- Abweichungen in der Achse des Implantats oder des Bohrers
In einer Übersichtsarbeit der internationalen Literatur werden für schablonengeführte Systeme folgende Mittelwerte für zwei der oben genannten Abweichungsparameter genannt: Horizontale Abweichungen von 1,12 mm (Max. 4,5 mm) am Eintrittspunkt und 1,2 mm (Max. 7,1 mm) am Apex.[4] Für die Abweichungen in der Vertikalen werden 0,23 mm (Max. 1,43 mm) angegeben und Abweichungen in der Angulation von 4,0 ° (Max. 20,43°). Neuere Studien, die die Genauigkeit von Führungsschablonen aus Kaltpolymerisaten untersuchten, kamen zu dem Ergebnis, dass mittlere Abweichung von 0,3 bis 0,9 mm an der Implantatschulter und 0,5–0,9 mm am Apex auftraten. Mittlere Abweichungen in der Angulation betrugen 2,1° bis 4°.[5][6]
Einzelnachweise
- S. Harder: 3D-geplante schablonengeführte Implantologie. In: der junge zahnarzt. 3, 2012, S. 10–19, doi:10.1007/s13279-012-0189-3.
- D. Harris, K. Horner u. a.: E.A.O. guidelines for the use of diagnostic imaging in implant dentistry 2011. A consensus workshop organized by the European Association for Osseointegration at the Medical University of Warsaw. In: Clinical oral implants research. Band 23, Nummer 11, November 2012, S. 1243–1253, ISSN 1600-0501. doi:10.1111/j.1600-0501.2012.02441.x. PMID 22432473.
- S2k-Leitlinie: Indikationen zur implantologischen 3D-Röntgendoagnostik und navigationsunterstützen Implantologie (Memento des Originals vom 23. September 2015 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. Deutsche Gesellschaft für Zahn-, Mund- und Kieferheilkunde (DGZMK). Abgerufen am 19. Oktober 2014.
- R. E. Jung, D. Schneider u. a.: Computer technology applications in surgical implant dentistry: a systematic review. In: The International journal of oral & maxillofacial implants. Band 24 Suppl, 2009, S. 92–109, ISSN 0882-2786. PMID 19885437. (Review).
- H. J. Nickenig, M. Wichmann u. a.: Evaluation of the difference in accuracy between implant placement by virtual planning data and surgical guide templates versus the conventional free-hand method - a combined in vivo - in vitro technique using cone-beam CT (Part II). In: Journal of Cranio-Maxillo-Facial Surgery. Band 38, Nummer 7, Oktober 2010, S. 488–493. doi:10.1016/j.jcms.2009.10.023. PMID 19939691.
- A. Behneke, M. Burwinkel u. a.: Accuracy assessment of cone beam computed tomography-derived laboratory-based surgical templates on partially edentulous patients. In: Clinical oral implants research. Band 23, Nummer 2, Februar 2012, S. 137–143, ISSN 1600-0501. doi:10.1111/j.1600-0501.2011.02176.x. PMID 21443593.