Telerobotik
Die Telerobotik ist ein Teilgebiet der Robotik, das sich mit der Steuerung von Robotern aus der Distanz beschäftigt. Zur Anwendung kommen vor allem kabellose Übertragungsverfahren, wie Wireless LAN, Bluetooth, das Deep Space Network, Tethering oder das Internet. Es werden zwei große Teilgebiete unterschieden: Telepräsenz mit Telepräsenzrobotern und Teleoperation mit Teleoperationsrobotern.

Überblick
Teleoperation
Teleoperation bezeichnet vereinfacht gesagt: Arbeit auf Distanz. Ein Teleoperator (auch Telemanipulator genannt) ist ein technisches Gerät, das ferngesteuert von einem menschlichen Leitstand gesteuert wird. Ist dieses Gerät zu autonomer Arbeit fähig, wird es Teleroboter genannt. Ist es vollständig autonom, wird es Roboter genannt.
In einfachen Fällen korrespondieren die Befehle des Leitstands mit denen des Geräts, wie zum Beispiel bei einem ferngesteuerten Flugzeug oder einem Remotely Operated Vehicle. In Fällen, in denen Verzögerungen oder Unterbrechungen in der Kommunikation eine direkte Kontrolle des Geräts unpraktikabel machen (beispielsweise bei einem Rover in der Raumfahrt), oder in denen die Arbeitsbelastung des Leitstands minimiert werden soll (zum Beispiel bei einem unbemannten Luftfahrzeug), werden die Geräte nicht über direkte Befehle gesteuert, vielmehr wird ihnen eine allgemeinere Aufgabe vorgegeben, und das Gerät wird autonom versuchen, diese Aufgabe zu erfüllen. Je weiter das Gerät in diese Richtung vervollkommnet wird, umso mehr entwickelt es sich von einem Teleroboter zu einem Roboter.
Telepräsenz
Telepräsenz meint vereinfacht gesagt: virtuell woanders sein. Der Telepräsenzroboter überträgt die Wahrnehmung seiner Sensoren an den Leitstand. Dabei liegt die technische Herausforderung nicht so sehr darin, die Sensorergebnisse zu übertragen, sondern darin, den Eindruck der virtuellen Realität zu erzeugen.[1]
Der MIT Professor Rodney Brooks formulierte dazu folgende Vision:[2]
„Die Telepräsenzroboter werden auf einen Gedanken hin unsere Wünsche erfüllen. Während wir vielleicht an einem bestimmten Ort physisch präsent sind, werden wir in der Lage sein, uns mental in ein Telepräsenzgerät und an einen anderen Ort zu projizieren, wenn wir dafür autorisiert sind. Alle, die diese Technologie nicht haben, werden sie bald haben wollen.“
Telepräsenzroboter sind vor allem im militärischen Bereich verbreitet, werden aber auch in der zivilen Fernerkundung eingesetzt. Im militärischen Umfeld werden sie häufig als Drohnen bezeichnet. Ihr Anwendungsbereich liegt in der Aufklärung häufig dort wo der Einsatz für Menschen zu gefährlich ist.[3]
Geschichte
Als einer der Vorläufer mobiler Teleroboter kann der kabel- oder funkgesteuerte Kleinstpanzer Goliath angesehen werden. Ein weiterer rudimentärer Teleroboter wurde im Jahr 1945 von Raymond Goertz im Argonne National Laboratory entwickelt. Er schuf einen Roboterarm mit dem hochradioaktives Material in einem Schutzraum aus der Ferne bewegt werden konnte. Zuerst wurde der Arm über mechanische Züge gesteuert, ab 1954 wurde die Maschine aber auf eine elektrische Servomechanik umgestellt.
William R. Corliss und Eric G. Johnson begannen Mitte der 1950er Jahre an der Entwicklung des ersten Telepräsenzroboter, auch wenn sie ihn noch nicht so nannten, der bereits über eine drehbare Kamera verfügte. Der russische Wissenschaftler Aaron Kobrinskii schuf 1960 eine Unterarmprothese, die durch Körpereigene elektrische Signale aus dem Oberarmstumpf gesteuert wurde.
In den 1960er Jahren begannen Forscher in den USA und der Sowjetunion mit der Entwicklung ferngesteuerter Roboter für die Weltraumforschung. Der erste Teleroboter im All wurde schließlich der sowjetische Lunochod 1, der von einer Solarzelle angetrieben wurde und über eine Kamera und einen Laserreflektor verfügte.
In den 1970er Jahren verlegte sich der Forschungsschwerpunkt auf Industrieanwendungen. In diesem Jahrzehnt wurden aber auch die ersten Unterwasser-Teleroboter gebaut. Nachdem sich die überzogenen Hoffnungen der Industrie auf Teleroboter aus den 1970er Jahren allerdings nicht erfüllt hatten, verlangsamte sich die Forschung in diesem Bereich in den 1980er und 1990er Jahren merklich. Auch das NASA Space Telerobotics Program wurde 1997 eingestellt.
Seit etwa 2000 steigt das Interesse an Telerobotern wieder, da sie nun einfacher über das gut ausgebaute Internet gesteuert werden können. Die Forschung konzentrierte sich vor allem auf militärische und medizinische Einsatzgebiete.
Technik

Die beiden wichtigsten Komponenten von Telerobotern sind die Sensorik und die Steuerungstechnik. Zur visuellen Sensorik werden zumeist drahtlose Videoübertragungssysteme eingesetzt. Die Kamera am Teleroboter so zu positionieren, dass sie eine intuitive Steuerung des Geräts erlaubt, ist nicht trivial, da Verzögerungen oder Störungen in der Datenübertragung auftreten können.
Insbesondere bei einer Kamerasteuerung über Head-Mounted Display sind Latenzzeiten häufig für den Benutzer unangenehm und machen die Steuerung unintuitiv. Solche Verzögerungen, Störungen oder andere Einschränkungen können beim Benutzer die sogenannte Simulator Sickness mit Übelkeit hervorrufen.
Interfaces
Teleroboter können durch einfache Schnittstellen, wie Monitor, Tastatur und Maus, gesteuert werden. Vor allem über das Internet gesteuerte Teleroboter verwenden zumeist ein so einfaches Interface. Eine sinnvolle Erweiterung ist dabei häufig ein Joystick, der eine intuitivere Steuerung für 2D-Roboterbewegungen erlaubt.
Für Telepräsenzroboter werden in der Regel Head-Mounted Displays eingesetzt. Die Steuerung erfolgt dann entweder über ein Joystick oder über Kopfbewegungen.
Anwendungsbereiche
Mit Ausnahme des Apollo-Programms wurden in allen Programmen der Weltraumforschung telerobotische Raumsonden eingesetzt. Auch die meisten Teleskope werden telerobotisch gesteuert. Bedeutende Beispiele sind die Mars Exploration Rover und das Hubble Space Telescope. Die Internationalen Raumstation ISS verfügt über zwei telerobotisch gesteuerte Roboterarme, die Special Purpose Dexterous Manipulator heißen.
Marine Remotely Operated Vehicles (ROVs) werden zu Erforschung der Tiefsee und zur Reparatur von Bohrinseln eingesetzt.
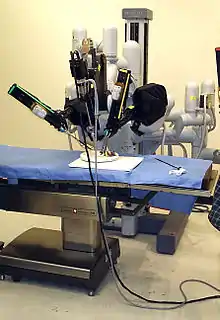
Ein weiteres großes Feld der Telerobotik ist die Medizin. Vor allem in der Chirurgie werden roboterassistierte Systeme eingesetzt.[4]
Auch in der Verarbeitung radioaktiver Stoffe werden telerobotische Roboterarme eingesetzt.
Quellen
Literatur
- Manuel Ferre, Martin Buss, Rafael Aracil, Claudio Melchiorri, Carlos Balaguer (Hrsg.): Advances in Telerobotics. Springer, Berlin 2007, ISBN 3-540-71363-8 (online in der Google-Buchsuche).
- Thomas B. Sheridan: Telerobotics, Automation, and Human Supervisory Control. The MIT Press, Cambridge 1992, ISBN 0-262-19316-7 (online in der Google-Buchsuche).
- Ken Goldberg, Roger F. Malina, Denise Penrose: Robot in the Garden: Telerobotics and Telepistemology in the Age of the Internet. The MIT Press, Cambridge 2001, ISBN 0-262-57154-4 (online in der Google-Buchsuche).
- Patrick Rößler: Telepräsente Bewegung und haptische Interaktion in ausgedehnten entfernten Umgebungen. KIT Scientific Publishing, Karlsruhe 2009, ISBN 978-3-86644-346-4.
Weblinks
- NASA Space Telerobotics Program. (Memento vom 8. April 2011 im Webarchiv archive.today) März 1998. (englisch)
Einzelnachweise
- Richard Held: Telepresence. In: Journal of the Acoustical Society of America. Band 92, Nr. 4, Oktober 1992, S. 2458, doi:10.1121/1.404500 (englisch).
- Rodney Brooks: Die Ankunft der Cyborgs. In: Financial Times Deutschland. 25. Februar 2002 (online [abgerufen am 24. März 2010]).
- Ronald G. Julian, Timothy R. Anderson: Robotic Telepresence: Applications of Human Controlled Robots in Air Force Maintenance. Hrsg.: Defense Technical Information Center. 1998 (englisch, abstract [abgerufen am 24. März 2010]).
- P. P. Pott, H.-P. Scharf, M. L. R. Schwarz: Today’s State of the Art of surgical Robotics. In: Journal of Computer Aided Surgery. Band 10, Nr. 2, 2005, S. 101–132, PMID 16298921 (englisch).