Bobylew-Steklow-Lösung
Die Bobylew-Steklow-Lösung (englisch case of Bobylev–Steklov)[1][2]:1173–1185[3]:92 ist in der Kreiseltheorie eine von Wladimir Steklow und Dmitri Bobyljow, der in der Schreibung Bobylew publizierte, 1896 unabhängig voneinander gefundene Lösung der Euler-Poisson-Gleichungen, die die Drehung von schweren Kreiseln um einen festen Punkt bestimmen.
Bobyljow und Steklow zeigten, dass bei einem unsymmetrischen Kreisel mit Hauptträgheitsmomenten A, B und C, bei dem C = 2A ist und der Massenmittelpunkt auf der zu C gehörenden Hauptträgheitsachse (kurz C-Achse) liegt, die Euler-Poisson-Gleichungen integriert werden können, wenn der Kreisel anfänglich weder eine Winkelgeschwindigkeit noch eine Winkelbeschleunigung um die B-Achse aufweist.
Ein solcher Kreisel kommt nie in Drehung um die B-Achse, hat eine konstante Winkelgeschwindigkeit um die C-Achse und alle seine anderen Zustandsgrößen sind Jacobische elliptische Funktionen der Zeit. Der schwere unsymmetrische Kreisel führt analytisch darstellbare periodische Präzessionsbewegungen aus. Trotzdem das Hauptträgheitsmoment B nicht in die analytische Beschreibung eingeht, beeinflusst es die Stabilität der entstehenden Bewegung.[2]:1180 ff.
Steklow fand drei Jahre später (1899) eine weitere Lösung, die 1952 von P. A. Kuz'min[3]:96 oder 2005 von A. P. Markeev[4] ergänzt wurde.
Bobylew-Steklow-Lösung
Lösung der Bewegungsgleichungen
Der Kreisel unterliegt in der Bobylew-Steklow-Lösung ausschließlich der Schwerkraft, womit seine Bewegung von den Euler-Poisson-Gleichungen bestimmt wird. Diese Gleichungen besitzen zwei Integrale der Bewegung, die Gesamtenergie und den Drehimpuls in Lotrichtung. Im Bobylew-Steklow-Fall sind weiterhin die Winkelgeschwindigkeiten um die 2- und die 3-Achse konstant. Diese Achsen besitzen in vertikaler z-Richtung Komponenten n2,3, die sich als Funktionen der z-Komponente n1 der 1-Achse erweisen. Für n1 existiert infolge dessen eine mit elliptischen Funktionen erfüllbare autonome Differentialgleichung, mit deren Lösung alle weiteren Zustandsgrößen des Kreisels dargestellt werden können.
Euler-Poisson-Gleichungen
Die Euler-Poisson-Gleichungen lauten im Bobylew-Steklow-Fall:

Darin sind n1,2,3 die Koordinaten des antiparallel zur Gewichtskraft nach oben weisenden Einheitsvektors und p, q, r = ω1,2,3 die Winkelgeschwindigkeiten im Hauptachsensystem. Das Stützpunktmoment[5] c0 = mgs ist das Produkt aus der Gewichtskraft mg mit dem Abstand s des Massenmittelpunkts vom Stützpunkt entlang der 3-Achse. Der Überpunkt bildet die Zeitableitung.
Wie bei jedem schweren Kreisel sind in der Bobylew-Steklow-Lösung die Gesamtenergie und der Drehimpuls Lz in Lotrichtung konstant. Der Präzessionswinkel um die Vertikale kann aus diesen Gleichungen nicht ermittelt werden, was im Hauptartikel nachzuschlagen ist.
Anfangsbedingungen
Mit den Anfangsbedingungen spezialisieren sich die Euler-Poisson-Gleichungen zu:


Die Zeitableitung der Gleichung (2) verschwindet wegen der Bedingungen (1), (3) und (4), weswegen (2), (3) und q = 0 permanent gilt. Die sechs Gleichungen sind dadurch nicht nur anfänglich, sondern dauerhaft in Kraft. Aus (3) ist ersichtlich, dass r konstant ist. Bei r = 0 ergibt sich eine pendelartige Drehung um die horizontale erste Hauptachse,[2]:1177 was hier nicht interessiert. Hier wird

angenommen. Der an dieser Stelle eingeführte dimensionslose Parameter ist proportional zum Drehimpuls um die 3-Achse.

Herleitung des Elliptischen Integrals
Mit den Gleichungen (6), (2) und (4) wird n3 berechnet:

Die Integrationskonstante j ist dimensionslos und proportional zum lotrechten Drehimpuls Lz. Die fünfte Gleichung liefert mit dem Gefundenen

und die zeitabgeleitete Gleichung (4) eine autonome Differentialgleichung

in n1. Multiplikation mit erlaubt eine Zeitintegration:


Wegen ist die Integrationskonstante D nicht beliebig, sondern es ergibt sich nach algebraischen Umformungen


Trennung der Veränderlichen führt auf ein elliptisches Integral

womit das Problem im Prinzip gelöst ist. Die darin vorkommenden Werte

sind Konstanten und liegen mit den Anfangsbedingungen vor, in denen

eingestellt sein muss.
Aus den zusammen getragenen Beziehungen ergibt sich die Gesamtenergie des Kreisels zu
- .

Darstellung mit Jacobis elliptischen Funktionen
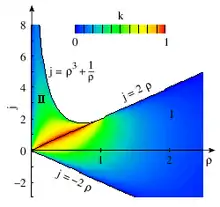
Das Polynom unter der Wurzel im elliptischen Integral für n1 hat die Nullstellen

Je nachdem zwei oder vier dieser Nullstellen reell sind, entstehen unterschiedliche Lösungsfunktionen:
- Region I mit -2ρ < j < 2ρ erlaubt nur zwei reelle Nullstellen.
- Region II mit ermöglicht vier reelle Nullstellen.

Die elliptischen Moduli der elliptischen Lösungsfunktionen sind im Bild dargestellt. Bei k nahe 0 weichen die elliptischen Funktionen nur gering vom Sinus und Cosinus ab. Die weiß belassenen Flächen sind dem Kreisel nicht zugänglich, wenn , eine Auflage, die aus den speziellen Anfangsbedingungen resultiert. Vergleichbare Lösungen entstehen, wenn ρ und j beide gleichzeitig ihr Vorzeichen wechseln. Der Einfachheit halber werden im Folgenden positive Werte für ρ angenommen.

Region I
In der Region I ist |j| < 2ρ und die analytische Lösung lautet:

mit

Die Konstanten j und ρ sind bei der #Herleitung des Elliptischen Integrals angegeben und sn, cn sowie dn sind drei grundlegende Jacobische elliptische Funktionen. Die Winkelgeschwindigkeit p hat die Periode , worin K(k) das vollständige elliptische Integral der I. Art ist. Bei dieser Lösung schwingen p sowie n1,2 periodisch um 0.

Im Grenzfall j = -2ρ oder j = 2ρ > 2 ist k = 0 und es stellen sich Staude-Drehungen mit der Winkelgeschwindigkeit um die vertikale 3-Achse mit n3 = -1 bzw. n3 = +1 ein.[2]:1176

Falls j = 2ρ < 2 ist k = 1 und es ergibt sich ein mit der Region II gemeinsamer #Aperiodischer Grenzfall.
Region II
In der Region II ist ρ < 1, 2ρ < j < ρ3 + 1/ρ und die analytische Lösung lautet:

mit

Die Konstanten j sowie ρ sind bei der #Herleitung des Elliptischen Integrals angegeben, sn, cn sowie dn sind drei grundlegende Jacobische elliptische Funktionen. Die Winkelgeschwindigkeit p hat die Periode , worin K(k) das vollständige elliptische Integral der I. Art ist. Bei dieser Lösung wechseln p sowie n1 nie das Vorzeichen und schwingen periodisch um einen von 0 verschiedenen Wert.

Bei j = ρ3 + 1/ρ ist k = 0 und der Kreisel führt eine Staude-Drehung um die Vertikale mit n1 = ±√(1 - ρ4), n2 = 0 und n3 = ρ2 aus. Falls j = 2ρ kommt es zum aperiodischen Grenzfall.
Aperiodischer Grenzfall
Den beiden Regionen I und II ist der Grenzfall j = 2ρ < 2 gemeinsam. Dort ist k = 1 und die Jacobischen elliptischen Funktionen werden zu den aperiodischen Hyperbelfunktionen:

mit

Die Bewegung geht asymptotisch in eine Staude-Drehung mit der Winkelgeschwindigkeit um die vertikale 3-Achse über.[2]:1176
Stabilität
Die Stabilität der Bewegung hängt nicht nur von den Parametern ρ und j ab, sondern auch vom mittleren Hauptträgheitsmoment B. Dieses liegt bei einem realen Kreisel im Intervall A < B < 3A. Die Zonen stabilen und instabilen Verhaltens sind im Parameterraum ρ, j, β = B/A durch dreidimensional gekrümmte Flächen getrennt. In Region I sind Kreisel mit zu großem B > A oft instabil. In Region II sind Kreisel mit B nahe 2A oder ρ > 0,8 oft instabil.[2]:1182
Zweite Lösung von Steklow und Markeev
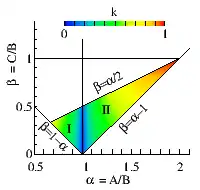
Steklow fand 1899 eine weitere Lösung, bei der er den Ansatz n2 ~ p·q und n3 ~ p·r machte. Der Massenmittelpunkt liegt diesmal auf der zu A gehörenden ersten Hauptachse im Abstand s vom Stützpunkt, womit sich die Euler-Poisson-Gleichungen mit den Bezeichnungen vom Abschnitt #Euler-Poisson-Gleichungen

schreiben. Im Gebiet I, siehe Bild, lautet die Lösung

mit

Damit alle Koeffizienten reell sind, muss bei einem realen Starrkörper 2C < A < B < A + C sein. Es zeigt sich, dass der vertikale Drehimpuls null ist und die Gesamtenergie des Kreisels

wird. Diese Bewegung ist immer instabil.[4]
P. A. Kuz'min (1952)[3]:96 oder A. P. Markeev(2005)[4] ergänzten die Lösung im Gebiet II:

mit

Diesmal müssen die Hauptträgheitsmomente die Bedingungen 2C < A, B < A < B + C erfüllen. Der vertikale Drehimpuls ist wieder null und die Gesamtenergie des Kreisels lautet:

Die Bewegung im Gebiet II ist fast überall stabil.[4]
Da die Trajektorien ausschließlich von den Kreiseleigenschaften festgelegt werden, müssen die Anfangsbedingungen wie bei der Grioli’schen Präzession genau auf den Kreisel abgestimmt sein, denn es ist nur der Zeitparameter t0 frei.
Einzelnachweise
- K. Magnus: Kreisel: Theorie und Anwendungen. Springer, 1971, ISBN 3-642-52163-0, S. 131 (eingeschränkte Vorschau in der Google-Buchsuche).
- Yehia, Hassan, Shaheen (2015)
- Leimanis (1965)
- A. P. Markeev: On the Steklov case in rigid body dynamics. In: Regular And Chaotic Dynamics. Band 10, Nr. 1. Turpion-Moscow Ltd, 2005, ISSN 1560-3547, S. 81–93, doi:10.1070/RD2005v010n01ABEH000302.
- R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Vieweg Verlag, Braunschweig 1920, S. 89 (Textarchiv – Internet Archive – „Schwung“ bedeutet Drehimpuls, „Drehstoß“ Drehmoment und „Drehwucht“ Rotationsenergie).
Literatur
- H. M. Yehia, S. Z. Hassan, M. E. Shaheen: On the orbital stability of the motion of a rigid body in the case of Bobylev–Steklov. In: Nonlinear Dynamics. Band 80. Springer Link, 2015, ISSN 1573-269X, S. 1173–1185, doi:10.1007/s11071-015-1934-3.
- Eugene Leimanis: The General Problem of the Motion of Coupled Rigid Bodies about a Fixed Point. Springer Verlag, Berlin, Heidelberg 1965, ISBN 3-642-88414-8, S. 92 und 96, doi:10.1007/978-3-642-88412-2 (englisch, eingeschränkte Vorschau in der Google-Buchsuche [abgerufen am 21. März 2018]).