Tauchcomputer
Ein Tauchcomputer hilft dem Taucher bei der Planung und Durchführung von Tauchgängen, um Dekompressionsunfälle (Taucherkrankheit) zu vermeiden. Während des Tauchgangs misst der Tauchcomputer kontinuierlich die Tauchtiefe und Tauchzeit[1] und errechnet daraus das Profil des Tauchgangs. Daraus errechnen Tauchcomputer – durch die Simulation mehrerer Gewebearten und deren Sättigung mit Inertgasen – die aktuell erforderlichen Dekompressionspflichten.[2]

Bis zur weiten Verbreitung des Tauchcomputers in den 1990er Jahren maßen Taucher die verstrichene Zeit unter Wasser mit einer Taucheruhr und die Tiefe auf einem eigenen Tiefenmesser. Über eine mitgeführte, auf Kunststoff gedruckte Dekompressionstabelle wurde die verbleibende sichere Rest-Tauchzeit (Nullzeit), bzw. die Notwendigkeit von Dekompressions-Stops, durch Ablesen ermittelt. Dies war umständlich, aufwendig, prinzipiell ungenau und fehlerträchtig, weshalb der Tauchcomputer einen Meilenstein in der Steigerung von Sicherheit, Komfort und Flexibilität im Tauchsport und im Berufstauchen darstellte.
Geräte, die nur Tauchtiefe und Tauchzeit anzeigen und teilweise aufzeichnen, aber keine Berechnung der Dekompressionspflichten vornehmen, werden Bottom-Timer genannt.[3]
Geschichte
Dekompressiometer
Als die US Navy in den 1930er-Jahren die ersten Dekompressionstabellen publizierte – die das Risiko einer Dekompressionskrankheit verminderten – wurde schnell die Notwendigkeit eines Geräts erkannt, das automatisch den Tauchgang kontrolliert und den Taucher vor dem Überschreiten von Grenzwerten warnt. 1951 wurde deshalb das Scripps Institution of Oceanography in San Diego beauftragt die Grundlagen für ein solches Gerät zu entwickeln. Zwei Jahre später publizierte das Institut einen Bericht, der vier Anforderungen an ein solches Gerät formulierte:[5]
- Das Gerät muss die nötigen Dekompressions-Stufen während eines Tauchgangs berechnen können, wozu es der Taucher mittragen muss.
- Wiederholungstauchgänge müssen in die Kalkulation miteinbezogen werden können.
- Multileveltauchgänge müssen möglich sein.
- Das Gerät soll genauere Berechnungen zulassen als eine Dekompressionstabelle.
Die Verfasser empfahlen im Jahre 1953 eine analogelektronische Umsetzung.
Da die Elektronik jener Tage nicht weit genug entwickelt war, um solch komplexe Aufgaben auf kleinstem Raum zu lösen, beauftragte die Navy das Unternehmen Foxboro[6] (heute Invensys), ein mechanisch-pneumatisches Dekompressiometer zu bauen. Das 1955 vorgestellte Gerät wurde Mark I genannt und wurde von der Navy kritisiert, da es zu ungenau und wenig stabil sei. Mark I simulierte zwei Gewebearten mit insgesamt fünf Durchflusswiderständen aus poröser Keramik und verfügte über fünf Faltenbälge zur Messwerterfassung.[7]
1959 wurde ein kommerzielles Dekompressiometer von Carlo Alinari vorgestellt, genannt SOS. Es arbeitete ähnlich wie der Mark I, beschränkte sich aber auf eine simulierte Gewebeart und ersetzte die Faltenbälge durch eine Blase.[8] Eine große Verbreitung fanden diese Geräte erst, nachdem Scubapro im Jahr 1963 die Importrechte dafür erwarb.[9] Obwohl die Korrektheit der Simulation von Wiederholungstauchgängen sehr umstritten war, wurde es von Tauchern rund um die Welt wegen seiner hohen Zuverlässigkeit geliebt.[7]
Von Ende der 1960er Jahre bis in die frühen 1980er Jahre wurden viele verschiedene Dekompressiometer von verschiedenen Firmen entwickelt und verkauft. Alle bauten auf dem mechanisch-pneumatischen Konzept auf, obwohl einige das Wort "Computer" im Namen trugen. Weitere bekannte Dekompressiometer:[7]
- DCIEM Mark: Wurde 1962 vom kanadischen DCIEM-Institut auf den Markt gebracht und simulierte vier verschiedene Gewebearten.
- GE Deco Meter: General Electric stelle 1973 ein Gerät vor, das statt auf in Dekompressiometern üblichen Keramik-Membranen auf halbdurchlässigen Silikon-Membranen basierte, was tiefere Tauchgänge erlaubte.
- Farallon Decomputer: Das Unternehmen Farallon Industries California bot ab 1975 ein Gerät an, das zwei Gewebearten simulierte und besonders einfach abzulesen war. Da es aber in der Praxis stark von der damals genutzten Navy-Dekompressionstabelle abwich, wurde es bereits ein Jahr später wieder vom Markt genommen.
Analogelektronische Dekompressiometer
Parallel zur Entwicklung der mechanisch-pneumatischen Dekompressiometer wurden auch Konzepte entwickelt, die aus einem analogelektronischen Computer bestanden. Die Simulation der Gewebe erfolgte in einem Netzwerk aus ohmschen Widerständen und Kondensatoren. Diese analog-elektronischen Geräte erwiesen sich als zu wenig temperaturstabil und erforderten einen großen Kalibrierungsaufwand vor jedem Tauchgang. In Gewicht und Größe übertrafen die analog-elektronischen Geräte die mechanisch-pneumatischen bei weitem, da eine leistungsstarke Batterie für deren Betrieb erforderlich war. Das erste analog-elektronische Dekompressiometer war der Tracor, der 1963 von Texas Research Associates fertiggestellt wurde.[10]
Erste digitale Tauchcomputer
Mit der zunehmenden Leistungsfähigkeit und Miniaturisierung der digitalen Computer, wurde Mitte der 1970er Jahre auch die Messwertauswertung und das Berechnen der Nullzeit in Echtzeit möglich. Eine große Herausforderung stellte aber immer noch die Stromversorgung dieser mobilen Computer dar, da die Prozessoren und Speicher-Bausteine jener Zeit nicht besonders energieeffizient arbeiteten und leistungsfähigere NiCd-Akkus noch sehr teuer und selten waren.[7] Der erste digitale Tauchcomputer war ein Gerät, das äußerlich an eine Registrierkasse erinnerte und über dem Wasser blieb. Dieser Tischcomputer war fähig, vier Gewebearten zu simulieren und die verbleibende Nullzeit korrekt zu berechnen. Er wurde nur bei oberflächenversorgten Tauchern eingesetzt, die neben den Schläuchen für die Luftversorgung und Heizung, einen zusätzlichen leeren Schlauch mitführten, der dem Tauchcomputer Druckmessungen ermöglichte. Dieses fürs Labor gebaute digitale Gerät mit der Beziehung XDC-1 stellte das DCIEM-Institut im Jahre 1975 fertig und nutzte es für Forschungsarbeiten. Sein Nachfolger, der XDC-2, wurde von der CTF Systems Inc.[11] hergestellt und funktionierte nach dem gleichen Prinzip wie sein Vorgänger. Es wurde in größeren Stückzahlen vorwiegend an Institutionen verkauft, die sich mit Überdruckmedizin beschäftigten. Etwa 700 Stück des Nachfolgemodells XDC-3 wurden zwischen 1979 und 1982 verkauft. Es war so kompakt, dass es unter Wasser mitgeführt werden konnte, womit der XDC-3 der erste echte digitale Tauchcomputer war. Es waren vier 9V-Batterien für die Stromversorgung notwendig und trotzdem beschränkte sich die Laufzeit auf nur rund vier Stunden.[12] Der XDC-3 wurde auch unter dem Namen CyberDiver vermarktet.
Ab 1976 baute der Tauchausrüster Dacor (heute Head) einen digitalen Tauchcomputer, der aber keine Gewebesimulationen ausführte, sondern nur eine abgespeicherte Navy-Dekompressionstabelle auslas. Das kanadische Unternehmen KyberTec brachte 1980 den CyberDiver II auf den Markt, der ebenfalls nur eine Dekompressionstabelle auslas, aber zusätzlich über eine Luftintegration verfügte. Sein Nachfolgemodell, CyberDiver III, das ein Jahr später erschien, berechnete wie der XDC-3 durch Gewebesimulationen die verbleibende Nullzeit.[5] 1980 begann die US-Navy mit der Entwicklung eines Tauchcomputers mit dem Namen UDC. Er simulierte neun Gewebe nach einem Dekompressionsmodell von Edward Thalmanns und kam mit Mischgasen zurecht. 1983 stellte die Orca Industries Inc. ihr Modell Edge (Electronic Dive GuidE) der Öffentlichkeit vor, das als erster Tauchcomputer ein grafisches Display besaß und fähig war, die Nullzeit für Multilevel-Tauchgänge zu berechnen. Der Edge simulierte zwölf Gewebearten und konnte für etwa 12 Stunden mit nur einer einzigen 9V-Batterie betrieben werden.[7] In den USA war der Edge kommerziell sehr erfolgreich und wurde in großen Stückzahlen verkauft. In einer Zusammenarbeit zwischen den Unternehmen U.S. Divers (heute Aqualung International) und Oceanic wurde 1983 mit der Entwicklung eines Tauchcomputers begonnen. Fertig wurde der DataScan 2 respektive DataMaster II erst im Jahre 1987, als bereits Dekompressionscomputer auf dem Markt erhältlich waren.[7]
Dekompressionscomputer
Der erste vollwertige Dekompressionscomputer, der nicht nur die Nullzeit, sondern bei komplexen Multilevel-Tauchgängen auch in Echtzeit die Dekompressionsstufen berechnete, wurde 1983 vom Schweizer Unternehmen Divetronic AG in Zusammenarbeit mit dem Tauchpionier Hans Hass auf den Markt gebracht.[7] Genannt wurde dieser Tauchcomputer DecoBrain und er simulierte 12 Gewebearten nach dem ZHL-12-Dekompressions-Modell von Albert Bühlmann. Dem Elektronik-Ingenieur Jürgen Herman gelang es 1981 an der ETH Zürich, das Dekompressions-Modell von Albert Bühlmann auf einem Mikrocomputer von Intel zu implementieren. Durch die Miniaturisierung der Hardware konnte er mit DecoBrain einen energiesparsamen und leichten Tauchcomputer entwerfen. Das ab 1985 produzierte Nachfolgemodell, der DecoBrain II basierte auf dem ZHL-16-Modell und wurde von einer NiCd-Batterie versorgt, die für eine Betriebszeit von 80 Stunden ausreichte.[7] Die Divetronic AG entwickelte auch das Modell Micro Brain für Dacor und war an der Fertigstellung des UDC der US Navy beteiligt, bevor sie 1989 von Scubapro übernommen wurde.
Der finnische Tauchinstrumente-Hersteller Suunto stelle mit dem SME-ML im Jahre 1986 einen sehr kompakten und preiswerten Dekompressionscomputer vor. Er orientierte sich an der Navy-Tabelle und wies, durch eine 1,5-V-Knopfzelle versorgt, eine Laufzeit von 1500 Stunden auf. Sein Nachteil war, dass er nur bis zu 60 m Tauchtiefe rechnen konnte.[7] Suunto ist heute der größte Hersteller von Tauchcomputern.
1987 erschien das Modell Aladin des Schweizer Unternehmens Uwatec, das auf dem ZHL-12-Dekompressions-Modell[13] aufbaute und besonders in Europa eine sehr weite Verbreitung erreichte.[7] Das französische Unternehmen Beuchat war an der Entwicklung des Aladin beteiligt und verkaufte ihn unter der eigenen Marke. Uwatec ist heute ein Geschäftszweig von Scubapro.
Gegenwärtige Entwicklung
Zahlreiche Hersteller bieten heute Dekompressionscomputer an. Standardmodelle berechnen Null- und Dekompressionszeit unter der Annahme, dass während des gesamten Tauchgangs ein vordefiniertes Gasgemisch geatmet wird. Höherpreisige Geräte beziehen auch den verbleibenden Gasvorrat in die Tauchgangsplanung mit ein, unterstützen den Wechsel zwischen vordefinierten Gasgemischen oder verfügen über einen elektronischen Kompass. Teilweise wird zusätzlich die Atem- und Herzschlag-Frequenz des Tauchers drahtlos erfasst und in die Berechnung mit einbezogen. Die jüngsten Entwicklungen gehen in Richtung großer Farb-Displays und Apps, ähnlich wie dies von Smartphones bekannt ist. So bietet das 2010 vorgestellte Modell Icon HD net ready von Mares ein 2,7”-Farb-Display und die Möglichkeit, ihn z. B. mit Kartenmaterial zu ergänzen.
Aufbau
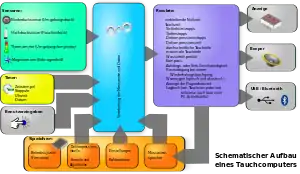
Der Tauchcomputer besteht aus einem druckfesten Gehäuse, in dem sich ein Sensor (meist Silizium-Drucksensor) für den Wasserdruck (und ggf. auch für andere physikalische Größen), ein Mikroprozessor und ein LC-Display, neuerdings auch vollgrafische OLED-Display an der Oberseite befinden. Wegen der besseren Abdichtung kommen als Bedienelemente oft elektrische Berührungssensoren (statt mechanischer Taster) zum Einsatz. Die meisten Tauchcomputer werden einzeln am Arm, ähnlich einer Armbanduhr getragen. Bei so genannten Konsolenmodellen ist der Tauchcomputer über den Hochdruckschlauch mit dem Atemregler des Tauchers verbunden. Solche Tauchcomputer messen meistens den Gasdruck über diesen Hochdruckschlauch, es ist jedoch auch möglich den Tauchcomputer mit einem separaten Finimeter (und weiteren Geräten) in einer Konsole zu tragen. Tauchcomputer mit Head-up-Display nehmen nur einen sehr geringen Marktanteil ein. Derartige Tauchcomputer können eine monolithische Einheit mit der Tauchmaske bilden oder mit einem separaten Band vor dem Kopf gehalten werden. In beiden Fällen kann der Taucher alle Informationen des Tauchcomputers ständig im Blickfeld behalten.

Rechenverfahren

Das Grundkonzept aller gängigen Tauchcomputer ist es, die Sättigung der Gewebe mit dem/den Inertgas(en) (Stickstoff, Helium etc.) aus den aufgezeichneten Daten zu berechnen, um daraus die resultierenden Dekompressionspflicht zu ermitteln. Dies erfolgt in kurzen Zeitintervallen (im Bereich weniger Sekunden), sodass der Taucher jederzeit die wesentlichen Elemente seiner Dekompressionspflicht ablesen kann. Die Berechnung erfolgt anhand eines mathematischen Modells, welches die medizinisch-physikalischen Vorgänge möglichst exakt abbilden soll. Diese Rechenmodelle lassen sich grob in Ein- und Zweiphasenmodelle unterteilen.
Bei den sog. Einphasenmodellen (z. B. Bühlmann und Haldane) wird davon ausgegangen, dass sich keine Gasblasen im Körper bilden. In dem Modell wird eine gewisse Anzahl unterschiedlicher Gewebe (z. B. 16 beim bekannten Rechenverfahren ZH-L16) angenommen, die sich in unterschiedlichen Geschwindigkeiten auf- und entsättigen. Diese Modellgewebe entsprechen dabei jeweils unterschiedlichen Gewebegruppen des menschlichen Körpers. Die angenommenen Halbwertszeiten liegen lt. dem Bühlmannmodell zwischen 4 und 635 Minuten. Weitere Annahmen darüber, welche Übersättigung der einzelnen Kompartimente akzeptiert werden können, entscheiden über Tiefe und Länge der Dekompressionsstopps, bzw. bis zu welchem Druck (Wassertiefe) noch aufgetaucht werden kann.
Bei einem Zweiphasenmodell, z. B. RGBM, wird hingegen davon ausgegangen, dass sich bei Einhaltung der Dekompressionsvorschriften Gasblasen im Körper bilden. Anstelle der einzelnen Kompartimente werden nun Annahmen darüber getroffen, wie die Gasblasen beim Aufstieg wachsen, während Dekostopps schrumpfen oder auch welche Blasengröße als medizinisch unbedenklich angesehen werden kann. Zweiphasenmodelle gelten vielfach als die realistischere Variante, da die Existenz von symptomlosen Gasblasen durch Ultraschallmessungen belegt werden kann.[14] Je nachdem, wie die einzelnen Modelle parametriert werden, können sich in der Praxis jedoch sehr ähnliche Dekompressionspläne ergeben.
Da Menschen unterschiedlich auf eine Übersättigung ihrer Körpergewebe und eine anschließende Druckentlastung reagieren, können die Rechenverfahren jedweder Art immer nur einen bestimmten Teil des Kollektivs abdecken. Bei den gängigen Tauchcomputern geht man davon aus, dass ein bis drei Prozent der Anwender trotz Einhaltens der durch den Rechner vorgegebenen Auftauchvorschriften Dekompressionsprobleme haben werden. Diese können symptombehaftet (DCS I oder II) oder symptomlos sein.
Im Gegensatz zu einer Tauchtabelle, deren Anwendung ein normiertes Tauchprofil erfordert, kann ein Tauchcomputer die Auftauchvorschrift für ein nahezu beliebiges vorangegangenes Tauchprofil errechnen. Allerdings finden sich auch hier Grenzen, da identische Tauchgänge bei verschiedenen Individuen einer Gruppe zu einer unterschiedlich hohen Restsättigung führen. Bei Wiederholungstauchgängen kann dies zu einer nicht mehr exakt bestimmbaren Inertgasvorsättigung beim einzelnen Taucher führen, wenn er den nächsten Tauchgang beginnt. Dies begründet sich u. a. darin, dass die Entfernung des restlichen im Körper verbleibenden Inertgases während der Oberflächenpause von Person zu Person sehr unterschiedlich ist. Auch lassen sich individuelle Risikofaktoren (Fettleibigkeit, Alkohol- oder Nikotinkonsum etc.) kaum in die Berechnung einbeziehen.
Bekannte Berechnungsmodelle und welche Hersteller sie heute (2013) einsetzen:[15]
| Dekompressionsmodell | Hersteller |
|---|---|
| RGBM | Mares, Suunto, Cressi-Sub |
| Haldanean | PPS, Cochran, Delta, Uwatec |
| Randy Bohrer | Seiko |
| Bühlmann ZHL-12 | Seiko, Uwatec |
| Bühlmann ZHL-16 | Uwatec |
| DSAT | PPS |
| VPM-B | Liquivision |
Funktionen

- Beleuchtung
- Tauchzeit
- aktuelle Tauchtiefe
- durchschnittliche Tauchtiefe
- maximale Tauchtiefe
- Wassertemperatur
- Kompass
- Warnung vor zu schnellem Aufstieg (optisch, akustisch)
- verbleibende Nullzeit
- Anzeige von Sicherheitsstopps
- Anzeige von Tiefenstopps, Dekompressionsstopps und Dekompressionszeit
- Berücksichtigung der Restsättigung bei einem Wiederholungstauchgang
- Warnung, wenn die Tiefe oder Dauer des Dekompressionsstopps nicht eingehalten wird.
- Anzeige der Flugverbotszeit: Wenn ein Taucher kurz nach einem Tauchgang und noch nicht vollständig entsättigt in ein Flugzeug steigt (niedrigerem Luftdruck ausgesetzt ist), kann er auch dort einen Dekompressionsunfall haben.
- Manuelle oder automatische Einstellung der Höhe des Wasserspiegels über Meeresspiegel (wichtig für Bergseetauchen in einer Höhe über 700 m).
- Warnung bei Unterschreiten der eingestellten, maximalen Tauchtiefe
- Weckerfunktion
- Logbuchfunktion: Zur nachträglichen Auswertung von Tauchgängen haben die meisten Tauchcomputer eine Logbuchfunktion, die es ermöglicht, die Daten von einem oder mehreren gespeicherten Tauchgängen abzurufen.
- PC-Schnittstelle: Um Daten mittels Software zur detaillierten Auswertung (z. B. grafische Darstellung des Tauchprofils) an einen Computer zu übermitteln. Abhängig vom Modell besteht auch die Möglichkeit der Aktualisierung der Gerätesoftware, Firmware sowie der Einstellung des Tauchcomputers (z. B. Personalisierungsfunktion).
Modellvarianten
Luftintegrierte Tauchcomputer

Luftintegrierte Tauchcomputer beziehen auch den Druck in der Druckluftflasche in die Berechnung ein und zeigen an, für welche Tauchzeit der Vorrat an Atemgas noch reicht. Manche Geräte beziehen den Luftkonsum des Tauchers in die Berechnung der Stickstoffaufsättigung bzw. der Dekompressionsberechnung mit ein.
Luftintegrierte Tauchcomputer kommen in zwei Varianten am Markt vor: mit Sender oder HD-Schlauch (Hochdruckschlauch). Modelle, die mittels HD-Schlauch am Hochdruckabgang der ersten Stufe des Atemreglers angeschlossen werden, ersetzen mitunter das mechanische Finimeter. Bei anderen Modellen befindet sich der Sensor für den Flaschendruck in einem separaten Sender, welcher an einen Hochdruckabgang der ersten Stufe geschraubt wird. Der Sender übermittelt die Druckwerte drahtlos an den Tauchcomputer. Zumindest in diesem Fall wird häufig die zusätzliche Verwendung eines mechanischen Finimeters empfohlen.
Tauchcomputer für technisches Tauchen
Insbesondere für das technische Tauchen entwickelte Tauchcomputer (sogenannte technische Tauchcomputer, Trimix- oder Mischgascomputer) können darüber hinaus u. a. folgende Möglichkeiten bieten:
- Verwendung unterschiedlicher Atemgasgemische auch im Verlauf eines einzigen Tauchganges
- Eignung für offene und geschlossene Tauchsysteme (Kreislauftauchgeräte)
- Echtzeitüberwachung des Sauerstoffgehaltes im Atemgas
Tauchcomputer für Apnoe
Auch für das Apnoetauchen wurden verschiedene Tauchcomputer entwickelt. Diese bieten meist mehrere Modi an, die für die unterschiedlichen Disziplinen des Freitauchens optimiert sind. Dazu zählen:
- Tieftauchen
- Streckentauchen
- Zeittauchen
Weblinks
Einzelnachweise
- Thomas Kromp, Oliver Mielke: Handbuch modernes Tauchen. Kosmos, Stuttgart 2010, ISBN 978-3-440-12164-1.
- Thomas Kromp, Hans J. Roggenbach, Peter Bredebusch: Praxis des Tauchens. 3. Auflage. Delius Klasing Verlag, Bielefeld 2008, ISBN 978-3-7688-1816-2.
- Roland Zbinden: Tauchcomputer und Bottom Timer. Dekostop GmbH, Schliern bei Köniz, abgerufen am 5. Februar 2018.
- Michael A. Lang: Introduction of the AAUS dive computer workshop. (PDF; 2,0 MB) Scripps Institution of Oceanography, abgerufen am 13. September 2013.
- Foxboro Decomputer Mark I. Defense Technical Information Center, abgerufen am 12. September 2013.
- Lothar Seveke: Entwicklung des Tauchcomputers (nur der Technik, nicht der Algorithmen). Abgerufen am 3. April 2013.
- Decompression Meter AKA Bendomatics. The Scuba Museum, Cincinnati Ohio, abgerufen am 3. April 2013 (englisch).
- Frank Dolacek: Tauchcomputer fürs Tieftauchen. Abgerufen am 3. April 2013.
- Albrecht Salm: Mein kleines virtuelles Tauchcomputer Museum. Abgerufen am 12. September 2013.
- Albrecht Salm: Mein kleines virtuelles Tauchcomputer Museum. Abgerufen am 12. September 2013.
- Marion Kutter: History of the dive computer. Dive Magazine Ltd., archiviert vom Original am 2. November 2013; abgerufen am 13. September 2013 (englisch).
- Karl E. Huggins: Underwater decompression computers: Actual vs. Ideal. Department of Atmospheric and Oceanic Science, abgerufen am 16. September 2013 (englisch).
- https://www.spektrum.de/magazin/die-physiologie-der-dekompressionskrankheit/822595
- S. Lesley Blogg, Michael A. Lang und Andreas Møllerløkken: Proceedings of Validation of Dive Computers Workshop. (PDF) Norwegian University of Science and Technology, 24. August 2011, abgerufen am 16. September 2013 (englisch).