Schenkelpolmaschine
Eine Schenkelpolmaschine ist eine rotierende elektrische Maschine, die zumeist als Drehstromsynchronmaschine,[1] seltener als einphasige Maschine,[2] ausgeführt und für niedrige Drehzahlen konstruiert ist.[1] Die Schenkelpolmaschine gehört zu den größten elektrischen Maschinen.[3] Auf Grund ihrer Bauart stellen Schenkelpolmaschinen eine kostengünstige Ausführung von Synchronmaschinen dar. Dieser Maschinentyp ist deshalb von allen Synchronmaschinen mit elektrischer Erregung am weitesten verbreitet.

Aufbau
Schenkelpolmaschinen bestehen aus einem Stator und einem Rotor, welche beide gemeinsam die Hauptmaschine bilden.[4] Bei den Schenkelpolmaschinen unterscheidet man, je nach Wicklungsanordnung, zwischen zwei Bauarten:
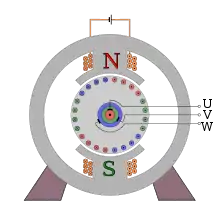
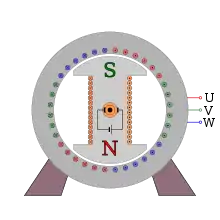
- Außenpolmaschinen: Der Stator der Außenpolmaschine gleicht im Aufbau dem einer fremderregten Gleichstrommaschine, er enthält die Magnetpole bzw. die Erregung der Maschine. Die Polschuhe umfassen möglichst den gesamten Umfang. Die Drehstromwicklung ist im Rotor untergebracht. Der Rotor ist aus Dynamoblechen aufgebaut, in Nuten liegen die Wicklungen; sie sind über drei Schleifringe nach außen geführt. Der Hauptstrom fließt über die Schleifringe.[5]
- Innenpolmaschinen: Bei der Innenpolmaschine ist der Stator genauso aufgebaut wie bei der Vollpolmaschine bzw. der Asynchronmaschine, er trägt die Drehstromwicklungen in Nuten eines Dynamoblech-Paketes. Die Magnetpole für die Erregung sind im Rotor. Der Rotor ist aus massivem Stahl gebaut und hat ausgeprägte Polschuhe, auf denen sich die Erregerwicklung befindet.[6] Wegen dieses Aufbaues ist es möglich, besonders viele Polpaare einzubauen.[7] Dadurch können langsamlaufende Maschinen gebaut werden. Die Rotoren von Schenkelpolmaschinen werden wegen ihrer Bauform auch als Schenkelpolläufer[3] oder Polrad bezeichnet.[7] Eine besondere Bauform der Innenpolmaschine ist die in Kraftfahrzeugen als Lichtmaschine eingebaute Klauenpolmaschine.[8] Hier werden die Pole mittels Eisenklauen gebildet und die Feldwicklung ist eine einzelne Spule in der Mitte.
Das Polbedeckungsverhältnis ist der von den Polschuhen eingenommene Umfangsteil und liegt bei kleineren Schenkelpolläufern bei 0,55 und bei größeren Maschinen bei 0,75. Ein Polbedeckungsverhältnis, das größer ist als 0,75, führt zu einer großen Polschuhstreuung.[9]
Insbesondere bei größeren Maschinen ist die Innenpolbauart günstiger, weil nur der geringe Erregerstrom über Schleifringe zu übertragen ist.[1]
Die Polräder enthalten manchmal einen Kurzschlusskäfig wie beim Käfigläufermotor oder eine Hilfswicklung, mit der ein Motor anlaufen kann (Anlaufkäfig), oder zur Dämpfung von Rotationsschwingungen dient (Dämpferkäfig).[9]
Bei großen Schenkelpolmaschinen werden für die Ständerwicklung seit 1998 auch mit vernetztem Polyethylen isolierte Leiter verwendet. Dadurch ist es möglich, eine Feldstärke von bis zu zehn Kilovolt pro Millimeter zuzulassen. Diese Generatoren können direkt Hochspannung erzeugen, wodurch kein Einspeisetransformator mehr erforderlich ist.[6]
Für niedrige Drehzahlen besitzen Schenkelpolmaschinen eine entsprechend große Anzahl an Polpaaren.[3] Die Anzahl der Polpaare beträgt bei diesen Maschinen mindestens drei und maximal 50.[10] Diese Polpaare benötigen einen entsprechend großen Platz. Aus diesem Grund haben Schenkelpolmaschinen einen großen Läuferdurchmesser, der über 15 Meter betragen kann. Da das Aktivvolumen leistungstypisch für die jeweilige Maschine ist, kann die Läuferlänge relativ klein sein. Schenkelpolmaschinen können mit senkrechter Welle betrieben werden.[5]
Drehzahlen
Schenkelpolmaschinen werden zumeist für Drehzahlen bis maximal 1000 min−1 gebaut. Die niedrigste Drehzahl, die mit Schenkelpolmaschinen erreicht wird, liegt bei 60 min−1.[11] Entsprechend der Drehzahl werden die Schenkelpolmaschinen unterteilt in Langsamläufer mit Drehzahlen bis 125 min−1 und Schnellläufer mit Drehzahlen, die größer sind als 125 min−1. Bei Wasserkraftgeneratoren spricht man erst ab einer Drehzahl von 250 min−1 von Schnellläufern.[3] Höhere Drehzahlen von über 20000 min−1 sind mit den für Lichtmaschinen im Kfz-Bereich typischen Klauenpol-Generatoren erreichbar.[12]
Berechnungsgrundlagen
Bei der Konstruktion des Läufers wird ein ausgewogenes Verhältnis von Ankerlänge zu Polteilung angestrebt. Dieses Verhältnis liegt bei Schenkelpolmaschinen zwischen 3 und 4,5. Rechnerisch ermittelt wird das Verhältnis gemäß der Formel:

Der maximale Läuferdurchmesser wird begrenzt durch die minimale Trägheitskonstante.

Diese Trägheitskonstante liegt für Langsamläufer zwischen 1,5 und 3 Ws/VA.[13]
Grenzen
Bei Langsamläufern sind Rotordurchmesser von über 20 m realisierbar. Bei großen Läuferdurchmessern (mehrere Meter) ist es jedoch schwierig, die Materialdehnung zu beherrschen. Durch die begrenzte mechanische Festigkeit des Polrades ist die Läuferumfangsgeschwindigkeit auf 70 bis 90 m/s beschränkt. Maschinen dieser Größenordnung können nur vor Ort montiert werden, da der Transport im Ganzen unmöglich ist – das Gewicht des Rotors und dessen Maße lassen das nicht zu.[14] Zu den weltweit größten Schenkelpolmaschinen zählen die 14 Generatoren der Drei-Schluchten-Talsperre am Jangtsekiang in China. Jeder Generator hat eine Nennleistung von 750 MVA bei 75 Umdrehungen pro Minute, entsprechend mit der Polpaarzahl 40 (80 Pole). Die Rotoren haben einen Außendurchmesser von 22 Metern und wiegen jeweils 1800 Tonnen.[15]
Laufwasserkraftwerkgeneratoren
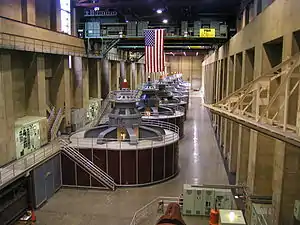
Für den Einsatz in Laufwasserkraftwerken als Langsamläufer werden Schenkelpolmaschinen mit der Welle in vertikaler Ausrichtung direkt über der Kaplan- oder Francis-Turbine betrieben. Normalerweise werden dabei die Führungslager (Axiallager) über dem Generatorläufer auf der Welle angeordnet, an der Welle „hängen“ dann sowohl der Turbinen- als auch der Generatorläufer. Diese Bauform ist insbesondere bei Großgeneratoren, wie den Generatoren am Hoover Dam, üblich.
Eine kostengünstigere und leichtere Variante stellt der Schirmgenerator dar, bei dem nur ein Führungslager zwischen Turbine und Generator vorhanden ist und der daher vom Aufbau her einem Schirm ähnelt. Schirmgeneratoren werden bei vergleichsweise kleineren Leistungen eingesetzt, typisch im Bereich unter 30 MVA. Die Kostenersparnis im Aufbau ergibt sich aus dem Umstand, dass nur der Turbinenläufer an der Welle hängt, während der Generatorläufer auf der Welle steht und im Wesentlichen nur Druckkräfte ausübt. Damit werden die Zugbelastungen der Welle in Summe geringer, weshalb die Konstruktion kostengünstiger dimensioniert werden kann. Nachteilig an Schirmgeneratoren ist die aufwändigere Wartung, da das Führungslager nicht ohne Demontage zumindest des Generatorläufers getauscht werden kann.[16]
Erregung
Die Erregung erfolgt durch Gleichstrom, die Stromzufuhr für den Rotor erfolgt über Schleifringe.[5] Der Gleichstrom wird in der Regel durch eine separate Erregermaschine erzeugt.[4] Bei einigen Maschinenbauarten wird das Magnetfeld durch Permanentmagnete erzeugt.[17] Mit der Gleichstromerregung wird jedoch eine bessere Regelbarkeit erzielt. Um den Erregerstrom hinreichend genau zu bestimmen, werden bei Schenkelpolmaschinen die Magnetisierungskennlinien benötigt. Diese Kennlinien werden aus der Leerlaufkennlinie und mehreren stationären Lastpunken mit reiner Blindleistungsabgabe ermittelt.[18]
Für große Maschinen ist ein Erregerausfallschutz unerlässlich.[19]
Kühlung
Bei Schenkelpolmaschinen gibt es drei Möglichkeiten zur Kühlung:
- Luftkühlung
- Wasserkühlung
- Kombinierte Luft-Wasserkühlung[14]
Bedingt durch die weniger gedrängte Bauweise der Schenkelpolmaschine, ist die reine Luftkühlung oftmals ausreichend.[6] Die reine Luftkühlung wird jedoch nur bei kleineren Maschinen angewendet.[14] Bei größeren Maschinen wird der Stator wassergekühlt. Bei großen Maschinen im Megawattbereich wird die reine Wasserkühlung oder die kombinierte Luft-Wasserkühlung verwendet.[14] Es gibt auch Großgeneratoren bei denen sowohl der Stator als auch der Rotor wassergekühlt wird.[6]
Betriebsverhalten

Je nach Polpaarzahl bilden sich entlang des mechanischen Umfangs des Läufers viele mechanische Nord- und Südpole aus. Jedoch weicht selbst bei idealer Wicklung die Feldverteilung stärker von der Sinusform ab, als dies bei Vollpolmaschinen der Fall ist.[20]
Bedingt durch die ausgeprägten Pole hat die Maschine keinen konstanten Luftspalt zwischen Rotor und Stator, sondern der Luftspalt schwankt periodisch beim Wechsel zwischen Polschuh und Zwischenraum im gesamten Maschinenumfang.[11] Außerdem ist der magnetische Widerstand RmL des Luftspaltes am Umfang des Rotors nicht konstant. In der Polmitte hat der magnetische Widerstand ein Minimum, in der Pollücke ein Maximum.[13] Die unterschiedlichen radialen Luftspaltabstände haben einen Einfluss auf die Drehdurchflutung. Dieses macht sich dadurch bemerkbar, dass die Induktivität einer Wicklung Lq, die einer Pollücke gegenübersteht, deutlich kleiner ist als die Induktivität Ld einer Wicklung, die einem Pol gegenübersteht.[11]
Deshalb weist das Rotorfeld der Schenkelpolmaschine eine magnetische Unsymmetrie auf, welche sehr ausgeprägt ist. Insbesondere unter Last kommt es zur Zahn- und Rotorpolsättigung. Als Folge davon kommt es in den Drehstromwicklungen zu Verlusten. Diese Verluste werden als Löwenherzverluste (Längsfeld-Verluste) bezeichnet. Ursache für die Löwenherzverluste ist das Zahnentlastungsfeld.[21] Bei einer Laständerung bleibt auch der Polradwinkel nicht konstant.[13] Außerdem tritt beim Wechsel vom Leerlauf zur Nutzlast eine starke Erhöhung der Induktion auf – allerdings nur an der Seite des Polschuhes, an welcher die Drehmomentbildende Kraft angreift. Durch asymmetrische Polschuhe wird die Induktion über den gesamten Polschuh gleichmäßig verteilt und die Verluste in den Drehstromwicklungen werden verringert.[21]
Ohne Gleichstromerregung entwickelt die Schenkelpolmaschine das Reaktionsmoment MR. Mit dem Reaktionsmoment, das etwa 25 % des Gesamtmoments der Maschine ausmacht, kann die Maschine als Motor belastet werden.[2] Infolge des Reaktionsmoment tritt das Kippmoment MK der Schenkelpolmaschine auf. Dieses Kippmoment ist das maximale Drehmoment der Maschine, es tritt bei einem Polradwinkel der kleiner als 90° ist auf.[13] Die Kenntnis des Reaktionsmoments nutzt man bei der Konstruktion von Reluktanzmotoren aus.[22]
Verwendung

Schenkelpolmaschinen können als Motor und auch als Generator eingesetzt werden.[23] Für den reinen Motorbetrieb werden in der Regel nur kleine Maschinen verwendet.[11] In Gruppenantrieben werden Motoren mit Schenkelpolläufer mit Leistungen von bis zu zehn Kilowatt verwendet. Es gibt aber auch Maschinen mit Leistungen von 250 Kilowatt, vereinzelt werden auch Maschinen mit bis zu 40 Megawatt Leistung eingesetzt.[23] Bei einigen Einsatzbereichen wie z. B. in Pumpspeicherkraftwerken werden sie sowohl als Generator als auch als Motor für den Pumpbetrieb eingesetzt. Der häufigste Einsatz ist als Synchrongenerator mit niedertourigen Antriebsmaschinen.
Beispiele für Antriebsmaschinen:
Der Polradwinkel, der etwas kleiner als bei Vollpolmaschinen ist, erreicht im Nennbetrieb einen Wert von 20° bis 25°.
Einheitenleistung
Die Leistung von Schenkelpolmaschinen hat sich innerhalb von 75 Jahren mehr als verhundertfacht. Während im Jahr 1903 die größte eingebaute Schenkelpolmaschine eine Leistung von 6,25 MVA hatte, beträgt die Leistung des Generators, der 1978 im Itaipú-Staudamm eingebaut wurde, 824 MVA. Nach 1978 wurden die Baugrößen bei Schenkelpolmaschinen nur noch unwesentlich erhöht.
Im Krafthaus Nr. 3 der Grand-Coulee-Talsperre am Columbia River ist zurzeit die größte Schenkelpolmaschine eingebaut. Sie hat eine Leistung von 825 MVA und eine Drehzahl von 85,71 min−1. In Pumpspeicherwerken haben die dort eingesetzten Motor-Generatoren maximal eine Leistung von 448 MVA. Bei den meisten Neuanlagen werden anstatt großer Einzelgeneratoren mehrere mittelgroße Generatoren mit Leistungen bis 300 MVA eingebaut.[25]
Literatur
- Dierk Schröder: Elektrische Antriebe – Regelung von Antriebssystemen. 3. Auflage, Springerverlag, Berlin Heidelberg 2009, ISBN 3-540-89612-0
Einzelnachweise
- Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg, 1983, ISBN 3-8023-0725-9.
- G. Schenke: Elektrische Netze und Maschinen. 7. Synchronmaschinen FB Technik, Abt. E+I (Memento vom 5. Dezember 2013 im Internet Archive) (PDF; 406 kB)
- Hanskarl Eckardt: Grundzüge der elektrischen Maschinen. B. G. Teubner, Stuttgart 1982, ISBN 3-519-06113-9
- Siegfried Heier: Windkraftanlagen, Systemauslegung, Netzintegration und Regelung. 5. Auflage, Vieweg + Teubner, Wiesbaden, 2009, ISBN 978-3-8351-0142-5.
- Rolf Fischer: Elektrische Maschinen. 12. Auflage, Carl Hanser Verlag, München und Wien, 2004, ISBN 3-446-22693-1
- Friedhelm Noack: Einführung in die elektrische Energietechnik. Carl Hanser Verlag, München Wie 2003, ISBN 3-446-21527-1.
- A. Senner: Fachkunde Elektrotechnik. 4. Auflage. Verlag Europa-Lehrmittel, 1965
- Bosch Technische Unterrichtung Generatoren. 1. Ausgabe, Robert Bosch GmbH, Stuttgart, 1974, VDT-UBE 301/1 De (1.80)
- Paul Vaske, Johann Heinrich Riggert: Elektrische Maschinen und Umformer. Teil 2 Berechnung elektrischer Maschinen, 8. überarbeitete Auflage, B. G. Teubner, Stuttgart 1974, ISBN 3-519-16402-7.
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0
- Franz Moeller, Paul Vaske (Hrsg.): Elektrische Maschinen und Umformer. Teil 1 Aufbau, Wirkungsweise und Betriebsverhalten, 11. überarbeitete Auflage, B. G. Teubner, Stuttgart 1970
- Konrad Reif: Automobilelektronik: Eine Einführung für Ingenieure 3. Auflage, Vieweg+Teubner Verlag, Wiesbaden, 2009, ISBN 978-3-8348-0446-4
- Georg Flegel, Karl Birnstiel, Wolfgang Nerreter: Elektrotechnik für Maschinenbau und Mechatronik. Carl Hanser Verlag, München 2009, ISBN 978-3-446-41906-3.
- Felix von König: Bau von Wasserkraftanlagen. Verlag C.F. Müller GmbH, Karlsruhe 1985, ISBN 3-7880-7249-0
- Chronik der Elektrotechnik, VDE. Abgerufen am 15. September 2012.
- Regine Kapfhammer: Geschichte der ELIN Weiz, Diplomarbeit, Der Generatorenbau, Kap. 10
- Adolf J. Schwab: Elektroenergiesysteme Erzeugung, Transport, Übertragung und Verteilung elektrischer Energie. 3. neubearbeitete Auflage, Springer Verlag, Berlin-Heidelberg-Dartredt-London-New York 2012, ISBN 978-3-642-21957-3
- H. Mrugowsky: Experimentelle Ermittlung der Abschnittskennlinien von Synchronmaschinen. In: etzArchiv Bd. 7, 1985, Online (Seite nicht mehr abrufbar, Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis. (zuletzt abgerufen am 7. März 2013) (PDF-Datei; 2,02 MB)
- Paul Vaske, Johann Heinrich Riggert: Elektrische Maschinen und Umformer. Teil 2 Berechnung elektrischer Maschinen, 8. überarbeitete Auflage, B. G. Teubner, Stuttgart 1974, ISBN 3-519-16402-7
- Andreas Kremser: Elektrische Maschinen und Antriebe, Grundlagen, Motoren und Anwendungen. 2. Auflage, Teubner Verlag, Stuttgart, 2004, ISBN 3-519-16188-5
- Patentanmeldung DE10121022A1: Elektrische Maschine. Angemeldet am 28. April 2001, veröffentlicht am 7. November 2002, Anmelder: Voith Siemens Hydro Power Generation GmbH & Co. KG, Erfinder: Klaus Reppe.
- Hans-Ulrich Giersch, Hans Harthus, Norbert Vogelsang: Elektrische Maschinen Prüfen, Normung, Leistungselektronik. 5. Auflage, B.G. Teubner/GWV Fachverlage GmbH, Wiesbaden, 2003, ISBN 3-519-46821-2.
- Ekbert Hering, Alois Vogt, Klaus Bressler: Handbuch der Elektrischen Anlagen und Maschinen. Springer-Verlag, Berlin Heidelberg New York 1999, ISBN 3-540-65184-5.
- Erich Hau: Windkraftanlagen, Grundlagen, Technik, Einsatz, Wirtschaftlichkeit. 4. vollständig neu bearbeitete Auflage, Springer Verlag, Berlin Heidelberg 2003, ISBN 978-3-540-72150-5.
- Ali Farschtschi: Elektromaschinen in Theorie und Praxis. 1. Auflage, VDE-Verlag GmbH, Berlin und Offenbach 2001, ISBN 3-8007-2563-0
Weblinks
- H. Mrugowsky: Experimentell-analytische Bestimmung der Abschnittskennlinien von Synchronmaschinen (zuletzt abgerufen am 7. März 2013) (PDF-Datei; 934 kB)