Reluktanzmotor
Ein Reluktanzmotor ist eine Bauform eines Elektromotors, bei dem das Drehmoment im Rotor ausschließlich durch die Reluktanzkraft erzeugt wird und nicht zu wesentlichen Anteilen durch die Lorentzkraft, wie es bei magnetisch erregten Maschinen der Fall ist. Das bedeutet, dass die Maschine weder mit Permanentmagneten bestückt ist, noch befinden sich am Rotor elektrische Wicklungen. Dadurch entfallen prinzipbedingt auch jede Art von verschleißanfälligen Schleifringen und Bürsten. Der Rotor besitzt ausgeprägte Pole und besteht aus einem hochpermeablen, weichmagnetischen Material wie beispielsweise Elektroblech.
Im Vergleich zu permanentmagnetisch erregten Maschinen wie dem Synchronmotor weist der Reluktanzmotor eine geringe Drehmomentendichte auf. Das heißt, das Nenndrehmoment, bezogen auf das Volumen der Maschine, ist geringer.[1] Da der Motortyp im synchronen Betriebsmodus mittels eines Frequenzumrichters jedoch einen höheren Wirkungsgrad als sonstige Asynchron- und Synchronmotoren aufweist, ist er dennoch wirtschaftlich.[2][3][4]
Grundprinzip
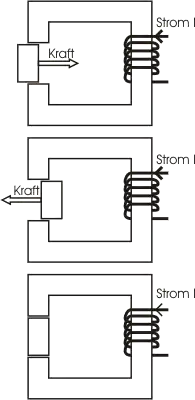
Die Bewegung kommt dadurch zustande, dass das System nach minimalem magnetischem Widerstand (Reluktanz) strebt. Als Modell kann man sich eine Ringkern-Spule vorstellen, bei der ein Schenkel lose ist (siehe Bild). Durch die Reluktanzkraft wird der lose Schenkel die Stellung anstreben, in der die Reluktanz ihr Minimum erreicht (also die Induktivität ihr Maximum erreicht). Im Reluktanzmotor bilden immer zwei Pole des Stators und zwei Pole des Rotors so einen „Ring“, indem sich der Rotor so stellt, dass die Reluktanz möglichst gering wird (also parallel zu den Feldlinien).
Eine alternative (etwas mathematischere) Betrachtungsweise ist, dass der Magnetfeld-Vektor, der den Rotor durchsetzt, in mehrere Komponenten zerlegt wird. Da der Rotor in Sättigung geht, werden die Teilvektoren nicht ihre volle „Länge“ erreichen, sondern nur ein Maximum, das in Richtung durch die Pole höher ist (wegen geringerer Reluktanz) als in andere Richtungen. Addiert man nun die so „verkürzten“ Komponenten vektoriell, so zeigt ihre vektorielle Summe in eine andere Richtung als der ursächliche Feldvektor des Stators. Der Rotor dreht sich nun, bis die Vektoren in die gleiche Richtung zeigen.
Indem die Statorpole zeitlich versetzt magnetisiert werden, wirkt die Kraft immer in eine andere Richtung, und es kommt eine Rotation zustande.
Vorteile
Der Vorteil eines Reluktanzmotors ist der Umstand, dass Verluste praktisch nur im ruhenden und somit von außen gut kühlbaren Stator entstehen. Somit sind entsprechend gebaute Reluktanzmotoren tolerant gegen kurzzeitige Überlastung. Durch den vergleichsweise einfachen Aufbau des Rotors ohne Spulen oder spezielle Werkstoffe (es werden keine Dauermagnete und keine Materialien wie Seltene Erden benötigt) kann der Rotor robust und bei entsprechender Konstruktion tolerant gegen Überdrehzahl ausgeführt werden.[5]
Nachteile
Nachteilig am Reluktanzmotor ist vor allem das pulsierende Drehmoment, das sich besonders bei kleiner Statorpolzahl auswirkt. Weitere Nachteile sind pulsierende radiale Kräfte zwischen Rotor und Stator, welche die Lager belasten und für eine vergleichsweise hohe Geräuschentwicklung verantwortlich sind. Außerdem ist für den Aufbau des Drehfelds, wie bei der Asynchronmaschine, ein Blindstrom erforderlich. Durch diesen Blindstrom steigt die Scheinleistung der elektronischen Umrichter.
Bauarten
Man unterscheidet im Wesentlichen vier Arten von Reluktanzmotoren:
- Synchron-Reluktanzmotor
- Der Synchron-Reluktanzmotor hat einen bewickelten mehrphasigen Stator (Ständer) wie eine Asynchronmaschine. Der Rotor (Läufer) ist aber nicht rund, sondern weist ausgeprägte Pole auf. Ein direkter Anlauf dieses Motortyps am Netz ist in der Regel nicht möglich, daher wird er meist mittels eines Frequenzumrichters angesteuert.
- Asynchronmotor mit Reluktanzmoment
- Soll auf den Frequenzumrichter verzichtet werden, so kann der Motor wie eine Asynchronmaschine mit einem Kurzschlusskäfig ausgerüstet werden und heißt dann Asynchronmotor mit Reluktanzmoment. Er läuft dann wie ein Asynchronmotor bis in die Nähe der asynchronen Gleichgewichtsdrehzahl an. Dann überwiegt der Reluktanzeffekt, und der Rotor dreht sich synchron mit dem Drehfeld. So lässt sich auf einfache und relativ preisgünstige Weise ein mit der Statorfrequenz synchron laufender Drehstrommotor bauen, jedoch weist diese Bauform gegenüber dem Betrieb mit Frequenzumrichter als Nachteile gegenüber Synchronmotoren und Asynchronmotoren einen geringeren Wirkungsgrad, eine geringere Kraftdichte und vor allem einen hohen Blindleistungsbedarf auf.
Wenn möglich, ist es aus diesem Grund sinnvoll, einen frequenzumrichtergespeisten Synchron-Reluktanzmotor einzusetzen.
- Geschaltete Reluktanzmaschine
- (kurz SRM, von englisch: switched reluctance motor, auch SR-drive):[6] Solche Reluktanzmotoren haben wie die anderen Typen eine unterschiedliche Anzahl ausgeprägter Zähne an Rotor und Stator. Die Statorzähne sind mit Spulen bewickelt, die abwechselnd ein- und ausgeschaltet werden. Die Zähne mit den bestromten Wicklungen ziehen jeweils die nächstgelegenen Zähne des Rotors wie ein Elektromagnet an und werden abgeschaltet, wenn (oder kurz bevor) die Zähne des Rotors den sie anziehenden Statorzähnen gegenüberstehen. In dieser Position wird die nächste Phase auf anderen Statorzähnen eingeschaltet, die andere Rotorzähne anzieht. Im Allgemeinen hat ein geschalteter Reluktanzmotor drei oder mehr Phasen. Es gibt aber auch Sonderbauformen mit nur zwei oder einer Phase. Um im richtigen Zeitpunkt umzuschalten, wird die Maschine in der Regel mit einem Rotorlagegeber versehen. Es gibt aber auch geberlose Steuerverfahren anhand des Statorstroms oder des Drehmomentes. Reluktanzmotoren dieser Bauart zeichnen sich durch hohe Robustheit und einen geringen Bauaufwand aus. Wie Asynchronmaschinen bilden sie im unbestromten Zustand bei Drehung kein Drehmoment aus. Eine Restmagnetisierung führt oft dennoch zu einem kleinen Rastmoment im stromlosen Zustand. Bei niedrigen Drehzahlen sind sie den Asynchronmaschinen bezüglich Drehmomentdichte aufgrund der hohen herstellbaren Polpaarzahlen überlegen, bei höheren deutlich unterlegen. Permanenterregten Synchronmaschinen sind sie diesbezüglich auf jeden Fall unterlegen.
- Reluktanz-Schrittmotor
- Ein Reluktanz-Schrittmotor kann im Prinzip gleich wie ein geschalteter Reluktanzmotor aufgebaut sein. Er wird im Gegensatz zu diesem aber ohne Kenntnis der Rotorposition geschaltet, ist dadurch einfacher, aber weniger zuverlässig (Schrittverluste). Im Gegensatz zu anderen Schrittmotoren ist der Reluktanz-Schrittmotor nicht in der Lage, im unbestromten Zustand seine Position zu halten.
Anwendungsbereiche
Reluktanzmotoren eignen sich gut für mittelgroße Antriebe (Durchmesser von 100 bis 300 mm) mit geringen Einschaltzeiten. Durch ihren einfachen und robusten Aufbau (zum Beispiel keine Rotorwicklungen oder Magnete) eignen sie sich sehr gut für den Betrieb in rauen Umgebungen. Für kleine Motoren scheiden sie wegen zu geringer Kraftdichte und zu geringem Wirkungsgrad aus, und für große wegen zu geringer Energieeffizienz und zu hohem Blindleistungsbedarf. Derzeit sind Ausführungen bis zu 52 kW bekannt.[7]
Ein weiteres Anwendungsgebiet für synchron laufende Reluktanzmotoren findet sich in der Textilindustrie zum synchronen Abspulen von Garn.
Geschaltete Reluktanzmotoren wurden in Hybridelektrokraftfahrzeugen als paralleler Hybridantrieb eingesetzt, weil sie im Gegensatz zu permanenterregten Motoren beim Antrieb durch den Verbrennungsmotor verlustfrei laufen und vor allem im Anlauf ein höheres Drehmoment als Asynchronmotoren haben. Als vollständig elektrisch angetriebenes Auto hat das Model 3 von Tesla einen Reluktanzmotor.[8]
Ein Vorteil synchron laufender wie geschalteter Reluktanzmotoren ist die kostengünstige Herstellung des Motors.[9] Bei geschalteten Reluktanzmotoren ist die Steuerungselektronik aufgrund des hohen Blindleistungsbedarfs etwas teurer als bei anderen Motortechnologien. Infolge gesunkener Preise für elektronische Komponenten sind sie dennoch inzwischen auch für die Verwendung in größeren Haushaltsgeräten (Waschmaschinen, Reinigungspumpen) attraktiv.
Literatur
- Ernst Hörnemann, Heinrich Hübscher, Dieter Jagla: Elektrotechnik, Industrieelektronik. Westermann, Braunschweig 2001, ISBN 3-14-221730-4.
- Hans-Günter Boy, Horst Flachmann, Otto Mai: Elektrische Maschinen und Steuerungstechnik. In: Die Meisterprüfung. 4. Auflage. Vogel Verlag und Druck, Würzburg 1983, ISBN 3-8023-0725-9.
- Fachkunde Elektrotechnik. In: Europa-Fachbuchreihe: Für elektrotechnische Berufe. 18. Auflage. Verl. Europa-Lehrmittel, 1989, ISBN 3-8085-3018-9.
- Peter Friedrich Brosch: Der neue Energiesparer – IE4 mit Reluktanzmotor. In Konstruktion, Nr. 7/8, 2011, S. 14–17
Weblinks
Einzelnachweise
- Dieter Gerling: Vorlesung Elektrische Maschinen und Antriebe. Universität der Bundeswehr München, S. 150–159. Online (Memento vom 13. Dezember 2013 im Internet Archive)
- Wirkungsgradvergleich Reluktanzmotor (IE4) zu IE3-Motor. KSB Aktiengesellschaft. Archiviert vom Original am 13. Dezember 2013. Abgerufen am 4. Dezember 2013.
- Reinhard Kluger: IE4-Antriebspaket mit Synchronreluktanzmotor. elektrotechnik. 4. Februar 2013. Abgerufen am 8. Dezember 2013.
- Peter F. Brosch, Hochschule Hannover: Synchron-Reluktanzmotoren erreichen Effizienzklasse IE4. Energie 2.0 Kompendium 2013. Archiviert vom Original am 24. September 2015. Abgerufen am 8. Dezember 2013.
- Peter F. Brosch, Hochschule Hannover: Synchron-Relkutanzmotor versus Asynchronmotor. publish-industry Verlag GmbH, 2. Juni 2014, abgerufen am 5. Oktober 2018.
- http://www.energie.ch/themen/industrie/antriebe/#Reluktanzmotor Vergleich Reluktanzmotor, Synchronmotor, Asynchronmotor
- Siemens Aktiengesellschaft: SIMOTICS SD-VSD4000 MOTOR TYPE: 1TV4222B IEC LV-Motor, Synchron Reluctanz Motor. Siemens Aktiengesellschaft, 22. Juli 2019, abgerufen am 19. August 2020.
- Tesla Model 3 dual motor performance version features both an AC induction and a permanent magnet motor (26. Februar 2019)
- Belgier entwickeln Elektromotor ohne Seltene Erden (25. Februar 2013)
{kind=link}
{kind=link}