Masse-Feder-System (Computergrafik)
Das Masse-Feder-System (kurz MFS, englisch Mass-Spring-System), in der Literatur auch Masse-Feder-Modell (kurz MFM), ist ein Verfahren in der Computergrafik, um das Deformationsverhalten von auf Polygonnetzen basierenden Objekten zu bestimmen. Es kann sowohl auf ebene als auch auf räumliche Objekte angewandt werden.
Die Gründe für die weite Verbreitung des Masse-Feder-Systems sind das leichtverständliche physikalische Konzept, die einfache Implementierung und die relativ niedrigen Rechenanforderungen.[1]
Geschichte
Das Masse-Feder-System basiert auf den physikalischen Ansätzen des Hookeschen Gesetzes.
Wegen der geringen Rechenleistung damaliger Computer wurde es anfänglich nur für Flächen genutzt (sowohl zweidimensionale, als auch im dreidimensionalen Raum eingebettete Flächen, zum Beispiel ein Tischtuch, das über einen Tisch fällt). Deshalb wurde es bei seinen ersten Verwendungen ab dem Jahr 1981 zunächst nur zur Haut- und Stoffverhaltenssimulation verwendet.[2][3] Erst 1989 wurden die ersten MFS-Volumenmodelle veröffentlicht.[4][5]
Heute ist es ein gängiges Verfahren in der Computerspielbranche und in der Medizin[1] zur Simulation operativer Eingriffe.
Aufbau
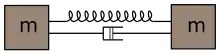
In einem Masse-Feder-System werden Objekte durch ein Netz aus Masseknoten, mechanischen Federn und Dämpfungsgliedern dargestellt.[2][6]
Die Knoten eines Polygonnetzes bekommen jeweils eine Masse. Die Kanten werden durch eine mechanische Feder, die mit einem Dämpfungsglied parallel geschaltet ist, dargestellt. Somit hat sie eine Federkonstante, eine Ruhelänge und eine Abklingkonstante. Das Dämpfungsglied ist notwendig, wenn das Objekt nach der Deformation nicht schwingen, sondern eine Ruhelage finden soll. In Abhängigkeit von den Masseknoten wird der Reibungskoeffizient errechnet.
Die Masseknoten sind regelmäßig im ganzen Objekt verteilt und stellen es so dar. Zur Verbindung der Masseknoten werden Federn zwischen sie gesetzt. Sind zwei Masseknoten miteinander verbunden, nennt man sie benachbart. Die Ausgangsform des Objekts liegt vor, wenn alle Federn in Ruhelage sind (), also deren Ruhelänge haben. Wird nun ein Masseknoten verschoben, liegt an den benachbarten Federn eine potentielle Energie an (), die nun durch Verschieben der benachbarten Massepunkten minimiert wird. Eine solche Verschiebung wirkt sich auf das ganze Netz aus, wodurch sich dieses verschiebt.


Um einer Verschiebung im Raum entgegenzuwirken, können Punkte „befestigt“ werden (an einer absoluten Position oder an einer relativen Position zu einem anderen Massepunkt).[6] Dadurch kann unter anderem eine plastische Deformation erzielt werden.
Das Masse-Feder-System kann, um physikalisches Verhalten realistischer zu machen, um eine Kollisionserkennung ergänzt werden, damit die Massepunkte auf Kollisionen untereinander und auf Kollisionen mit anderen Objekten reagieren können.
Berechnung
In der folgenden Herleitung wird von einem -dimensionalen Raum ausgegangen.

Masse-Feder-Systeme haben ihren Ursprung in der klassischen Mechanik. Sie basieren auf der Idee, dass ein Körper durch einen einzelnen Masseknoten repräsentiert werden kann. Weitergehend kann dieser Masseknoten in kleinere Masseknoten , verteilt über den ganzen Körper, unterteilt werden, sodass gilt:





Nach dem Hookeschen Gesetz ist das Verhalten einer Feder mit parallelem Dämpfungsglied folgendermaßen definiert:

wobei die Federkonstante, die Auslenkung der Feder zur Ruhelage und der Reibungskoeffizient ist.



Newtons Definition zum Verhalten einer bewegten Masse ist:

ist die Kraft, die dem Körper der Masse die Beschleunigung erteilt.


Auf Basis dieser letzten beiden Gleichungen kann die Bewegungsgleichung eines einzelnen Masseknotens hergeleitet werden.

Auf den Masseknoten mit der Masse wird bei der Verschiebung um die Kraft ausgeübt:



Die Auslenkung wird bei zwei Masseknoten und in einem Masse-Feder-System mit der Distanz voneinander, abzüglich der Länge der Feder im Ruhezustand , berechnet:




ist die Position des -ten Masseknotens. Mit wird der Richtungsvektor als Einheitsvektor von Masseknoten zu Masseknoten berechnet. Der Betrag von ist der Abstand zwischen Masseknoten und Masseknoten minus der Ruhelänge der Feder, was den Längenskalar darstellt. Das Skalarprodukt ist die Auslenkung des Masseknotens in Abhängigkeit vom Masseknoten .



Das führt zu folgender Kraft, die auf den einzelnen Masseknoten mit dem benachbarten Knoten wirkt:

Die externen Kräfte, die auf den Masseknoten wirken, können als zusammengefasst werden:


mit dem Vektor der äußeren Kraft , dem Gravitationsvektor und dem Vektor der anderen externen Einwirkungen .


Fasst man alle auf den Masseknoten wirkenden Kräfte zusammen, erhält man folgende Differenzialgleichung als Bewegungsgleichung, wobei die Menge der benachbarten Masseknoten ist:


Es gilt :


Die Bewegungsgleichung für das gesamte System erhält man, indem man alle Verschiebungen mit dem Vektor , die Massen mit der Matrix , die Reibungskoeffizienten mit der Matrix und die Federkonstanten der einzelnen Masseknoten durch die Matrix beschreibt:[1]







Die Matrizen und sind beide symmetrisch, da und . Daraus folgt, dass jeweils nicht alle Komponenten, sondern nur Komponenten berechnet werden müssen. Außerdem können die Komponenten auf der Hauptdiagonalen der Matrizen und (also die Komponenten und ) vernachlässigt werden, da es keine Feder gibt, die an beiden Enden mit demselben Masseknoten verbunden ist. Die Anzahl der zu berechnenden Komponenten verringert sich somit auf .







Siehe auch
Weblinks
- Johan Jansson: Beispiele zum Masse-Feder-System
Einzelnachweise
- Markus A. Schill: Biomechanical Soft Tissue Modeling Techniques, Implementation and Applications. Universität Mannheim, Mannheim 2001, DNB 964635690, urn:nbn:de:bsz:180-madoc-448 (englisch, Dissertation).
- S. Platt, N. Badler: Animating Facial Expressions. In: Computer Graphics. Band 15, Nr. 3, 1981 (englisch, citeseerx.ist.psu.edu [PDF]).
- K. Waters: A Muscle Model for Animating Three-Dimensional Facial Expression. In: Computer Graphics. Band 21, Nr. 4, 1987 (englisch, Link).
- J. Chadwick, D. Haumann, R. Parent: Layered Construction for Deformable Animated Characters. In: Proceedings of ACM SIGGRAPH. 1989 (englisch, citeseerx.ist.psu.edu [PDF]).
- D. Terzopoulos, K. Waters: Physically-based Facial Modelling, Analysis and Animation. In: The Journal of Visualisation and Computer Animation. Band 1, 1990 (englisch, nyu.edu [PDF]). PDF (Memento des Originals vom 23. April 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Jens Neumann: Verfahren zur adhoc-Modellierung und -Simulation räumlicher Feder-Masse-Systeme für den Einsatz in VirtualReality-basierten Handhabungssimulationen. Technische Universität Berlin, Fraunhofer IRB Verlag, 2009, ISBN 978-3-8167-7954-4 (Dissertation).