Magnetic Marker Monitoring
Das Magnetic Marker Monitoring (englisch) wurde entwickelt, um Bewegungsabläufe in geschlossenen Systemen und an schwer zugänglichen Stellen aufzuzeichnen, zu analysieren und gegebenenfalls zu optimieren. In der Gastroenterologie wird das magnetische Markermonitoring eingesetzt, um spezifische Motilitätsmuster während der gastrointestinalen Passage eines magnetischen Markers zu erkennen und so funktionelle Erkrankungen des Magen-Darm-Trakts diagnostizieren zu können.[1][2][3]
Besondere Aufmerksamkeit bei der Motilitätsanalyse liegt bei Magen-Entleerungsstörungen, entzündlichen Darmerkrankungen (Morbus Crohn, Colitis ulcerosa), Gastroparese, Zöliakie sowie Diabetes mellitus.[4] Bei diesen Erkrankungen wird von einer signifikanten Änderung der Motilität innerhalb der Verdauungsorgane ausgegangen.
Prinzip
Nachdem dem Patienten eine bioinerte Kapsel mit einem magnetischen Kern (z. B. Neodym-Eisen-Bor, NdFeB) verabreicht wurde, wird dieser unter ein magnetfeldempfindliches Sensorfeld (z. B. AMR-Sensoren) platziert. Die Sensoren messen das quasistatische Magnetfeld, welches den Marker umgibt. Die genaue Ausrichtung und Position des Markers wird durch einen Vergleich der aus der Simulation der aktuellen Markerlage resultierenden Feldverteilung mit der realen, gemessenen Magnetfeldverteilung ermittelt. Mittels spezieller Software werden die gewonnenen Daten aufgezeichnet und analysiert. Durch diese exakte Beobachtung des Markers durch den Gastrointestinaltrakt (GI-Trakt) können die Passagezeit und Motilitätsmuster des Patienten untersucht werden.
 Magnetischer Marker[5]
Magnetischer Marker[5] Monitoring System (3D-MAGMA)[5]
Monitoring System (3D-MAGMA)[5] Pfad einer Magnetkapsel durch den GI-Trakt[5]
Pfad einer Magnetkapsel durch den GI-Trakt[5]
Eine weitere Anwendung des Magnetic Marker Monitorings befindet sich in der Medikamentenentwicklung. Für die Herstellung pharmazeutischer Erzeugnisse sind Kenntnisse über die Resorption von Wirkstoffen von zentraler Bedeutung. Um die Resorptionseigenschaften in unterschiedlichen Darmabschnitten zu untersuchen, wird im Beispiel eine magnetische Kapsel verwendet (MAARS-Verfahren), die den enthaltenen Wirkstoff vom Anwender gesteuert freisetzt. Die Kapsel besteht aus einzelnen Segmenten, die durch magnetische Kräfte zusammengehalten werden. Das externe magnetische Streufeld der Kapsel dient der Lokalisation im Gastrointestinaltrakt. Durch eine gesteuerte Entmagnetisierung zerfällt die Kapsel in die einzelnen Segmente und gibt den enthaltenen Wirkstoff im Zielvolumen frei.



Physikalische Grundlagen für die Ortung eines magnetischen Markers
Die Maxwellschen Gleichungen
Mit Hilfe der Maxwellschen Gleichungen lassen sich sämtliche makroskopische Eigenschaften elektromagnetischer Felder beschreiben. Sie beinhalten das elektrische Feld , das magnetische Feld und die magnetische Flussdichte im Vakuum, die elektrische Ladungsdichte ρ, die Verschiebungsdichte D und die Stromdichte j. In differentieller Form lauten sie:




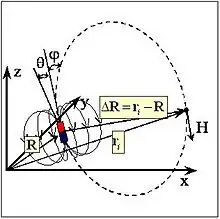
Ausgehend von diesen Gleichungen, lässt sich die Beschreibung für das Feld eines magnetischen Dipols herleiten:
- , mit μ = magnetisches Moment

Es ergeben sich für die eindeutige Bestimmung der Markerposition sechs Freiheitsgrade, fünf für die Lage des Dipols im Raum (X, Y und Z als kartesische Koordinaten sowie φ und θ für die Beschreibung der Orientierung des Markers) und das magnetische Moment μ als sechster Freiheitsgrad. Sind diese Variablen bekannt, kann die magnetische Feldstärke an jedem beliebigen Raumpunkt bestimmt werden. Da es sich bei der Markerlokalisation um ein inverses Problem handelt, lässt sich umgekehrt die Position des Markers nicht aus sechs unabhängigen Messungen explizit angeben. Aus diesem Grund wird das Problem der Ermittlung der Position sinnvollerweise mit Hilfe der Methode der kleinsten Fehlerquadrate gelöst.
Die Qualitätsfunktion
Für eine Anzahl von n Sensoren, die mindestens gleich der Anzahl der zu ermittelnden Freiheitsgrade ist, wird das magnetische Feld H um einen simulierten Marker und den Sensorpositionen berechnet und mit den gemessenen Sensorsignalen verglichen. Dazu werden sämtliche quadrierte Abweichungen von simulierten und tatsächlich magnetischen Feldstärken zu einer Fehler- oder Qualitätsfunktion aufsummiert:
- , mit M = Messung, S = Simulation

Die Position des zu lokalisierenden Markers wird mit einer geeigneten Strategie (Gradientenverfahren oder unscharfe Methoden) solange verändert, bis die Differenz zwischen Sensorsignal und simuliertem Feld minimal wird. Die so ermittelte Position entspricht der wahren Position des Markers. Zur Erhöhung der Genauigkeit und der Minimierung des Einflusses der statischen Fehler der Sensorsignale wird mit einer großen Sensoranzahl gearbeitet. Um den Einfluss äußerer Störungen zu minimieren, können verschiedene Abwandlungen der Qualitätsfunktion gebildet werden. Z. B. können die Sensoren bezüglich ihrer Empfindlichkeit bewertet werden. Die Qualitätsfunktion wird dann in folgender Form abgewandelt:
- , mit M = Messung, S = Simulation

wobei ΔH²i der Streuung der einzelnen Sensorsignale entspricht. Eine weitere Erhöhung der Genauigkeit wird durch die Einführung des Gradiometerprinzips erreicht. Dazu werden verschiedene Sensorsignale miteinander verknüpft, um äußere Störfelder zu eliminieren. Die Qualitätsfunktion für ein Gradiometer 1. Ordnung stellt sich dann wie folgt dar:
- , mit M = Messung, S = Simulation, G = Gradio

Eingesetzte Magnetfeldsensoren
Es existieren verschiedene Messgeräteanordnungen und Magnetfeldsensoren, die alle auf der dreidimensionalen Lokalisation magnetischer Marker beruhen. „Superconducting Quantum Interference Devices“- Sensoren (SQUIDs) ermöglichen die Erfassung kleinster Signale bis 10−15 Tesla.[7][8] Eine Messung mit diesen Sensoren ist sehr aufwändig, da die Sensoren gekühlt werden müssen (Tieftemperatur-SQUIDs mit flüssigem Helium, Hochtemperatur-SQUIDs mit flüssigem Stickstoff). Durch die hohe Magnetfeldempfindlichkeit der Sensoren ist im Allgemeinen eine magnetische Abschirmung erforderlich. Die Anwendung der SQUIDs ist daher sehr teuer und bleibt auf experimentelle Zwecke begrenzt. Ein anderer Sensortyp sind Hall-Sensoren (benannt nach Edwin Hall), die eine Empfindlichkeit bis 10−8 Tesla aufweisen und damit oberhalb urbaner Störungen (magnetische Störungen z. B. durch Klinikbetten, Fahrstühle) liegen[9][10]. Sie benötigen keine magnetische Abschirmung und arbeiten bei Raumtemperatur. Um eine große Reichweite zu erzielen, erweisen sich die bei den Hall-Sensoren eingesetzten magnetischen Marker als sehr groß und sind somit ungeeignet für medizinische Anwendungen.
Somit kommen in der klinischen Praxis v. a. AMR-Sensoren zum Einsatz. Deren Sensitivität liegt mit 10−10 Tesla geringgradig unter urbanen Störungen. Mit diesem Sensortyp kann bei Raumtemperatur in einem normalen Untersuchungsraum mit kleinen Magneten und mit einer ausreichenden Genauigkeit gemessen werden. Dieses Verfahren ist daher leicht durchführbar und preisgünstig[11][12]. Die Position eines solchen Magneten wird durch die Auswertung des ihn umgebenden magnetischen Streufeldes ermittelt. Nachdem er vom Menschen ingestiert wurde, können sein momentaner Aufenthaltsort, die jeweiligen Frequenzen, Aktivitäten und Geschwindigkeiten mit denen er bewegt wird, bestimmt werden. Dabei entspricht das Verhalten des magnetischen Markers dem unverdaulicher Nahrungsbestandteile im GI-Trakt z. B. dem von Kirschkernen.
Anwendung
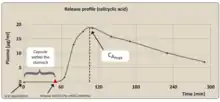
Ein reines Monitoring der Passage einer Kapsel und der Motilitätsmuster kann Aufschluss über den Verlauf einer Therapie oder Erkrankung aller gastrointestinaler Funktionsstörungen geben, bei denen eine veränderte Motilität des Magen-Darm-Traktes Bestandteil der Symptomatik ist. Hierbei sind insbesondere Gastroparese, Zöliakie, Morbus Crohn, Colitis ulcerosa, Diabetes mellitus und Diarrhoe zu nennen. Auch Motilitätsänderungen durch Medikamente, Nahrungsbestandteile und Operationen können durch ein Magnetic Marker Monitoring sehr gut beurteilt werden. Für die Entwicklung von Arzneistoffen ist eine gezielte Wirkstofffreisetzung von besonderer Bedeutung, da so die Resorption in unterschiedlichen Bereichen des Darmes ermittelt und eine optimierte Formulierung des Medikaments gefunden werden kann. Durch eine Kombination aus Monitoring und gesteuerter Wirkstofffreisetzung können pharmakokinetische Daten bzgl. der Bioverfügbarkeit und des Drug-Release-Profiles erfasst werden. Das im Bild dargestellte Freisetzungsprofil wurde mit dem "Magnetic activ agent release System" (MAARS) erzeugt.
Vorteile
Der wohl bedeutendste Vorteil gegenüber anderen diagnostischen Methoden der Gastroenterologie, wie der Endoskopie, ist die schmerzfreie und minimal-invasive Untersuchung des Patienten. Auch werden, im Gegensatz zu szintigraphischen Verfahren, keine radioaktiven Substanzen eingesetzt. Für die Arzneimittelforschung und -entwicklung ergeben sich Vorteile vor allem aus der schnellen und einfachen Durchführbarkeit von Wirkstoffstudien.
Einzelnachweise
- H. Richert: Entwicklung eines magnetischen 3-D-Monitoringsystems am Beispiel der nichtinvasiven Untersuchung des menschlichen Gastro-Intestinal-Traktes. (Dissertation, Friedrich-Schiller-Universität, Jena 2003).
- Wilfried Andrä, Henri Danan, Klaus Eitner, Michael Hocke, Hans-Helmar Kramer, Henry Parusel, Pieter Saupe, Christoph Werner, Matthias E. Bellemann: A novel magnetic method for examination of bowel motility. In: Medical Physics. Band 32, 2005, S. 2942–2944, doi:10.1118/1.2012788.
- Michael Hocke, Ulrike Schöne, Hendryk Richert, Peter Görnert, Jutta Keller, Peter Layer, Andreas Stallmach: Every slow-wave impulse is associated with motor activity of the human stomach. In: American Journal of Physiology-Gastrointestinal and Liver Physiology. Band 296, 2009, S. G709-G716, doi:10.1152/ajpgi.90318.2008, PMID 19095766.
- Felber J., Pätzold S., Richert H., Stallmach A.: 3D-MAGMA: A novel way of measuring gastrointestinal motility in patients with infectious diarrhoea. In: Gut. Band 60, 2011, S. 153–154, doi:10.1136/gut.2011.239301.325.
- Klinisches magnetisches Monitoring System, 3D-MAGMA (Memento vom 15. August 2013 im Internet Archive), Kapsel, Messsystem, Markerweg
- Freisetzungskapsel Magnetische Wirkstofffreisetzung, MAARS-Verfahren (Memento vom 10. März 2013 im Internet Archive), Maars-Verfahren
- O. Kosch, W. Weitschies, L. Trahms: On-line localization magnetic markers for clinical applications and drug delivery studies. In: Biomag 2004: Proceedings of the 14th International Conference on Biomagnetism: Boston, Massachusetts, USA, August 8-12, 2004. 2004, S. 261–262.
- Werner Weitschies, Olaf Kosch, Hubert Mönnikes, Lutz Trahms: Magnetic Marker Monitoring: An application of biomagnetic measurement instrumentation and principles for the determination of the gastrointestinal behavior of magnetically marked solid dosage forms. In: Advanced Drug Delivery Reviews. Band 57, Nr. 8, 2005, S. 1210–1222, doi:10.1016/j.addr.2005.01.025.
- V. Schlageter, B. Thevoz, Y. de Ribaupierre, B. Meyrat, N. Lutz, P. Kucera: Noninvasive examination of gastrointestinal motility by using magneto-detection. In: Neurogastroenterol Motil. Nr. 10, 1998, S. 105.
- E. Stathopoulos, V. Schlageter, B. Meyrat, Y. Ribaupierre, P. Kucera: Magnetic pill tracking: a novel non‐invasive tool for investigation of human digestive motility. In: Neurogastroenterology & Motility. Band 17, Nr. 1, 2005, S. 148–154, doi:10.1111/j.1365-2982.2004.00587.x.
- H. Richert, S. Wangemann, O. Surzhenko, J. Heinrich, K. Eitner, M. Hocke, P. Görnert: Magnetisches Monitoring des menschlichen Magen-Darm-Traktes. In: Biomedizinische Technik. Band 49, 2004, S. 718–719.
- Hendryk Richert, Olaf Kosch, Peter Görnert: Magnetic Monitoring as a Diagnostic Method for Investigating Motility in the Human Digestive System. In: W. Andrae, H. Nowak (Hrsg.): Magnetism in Medicine. WILEY-VCH, Weinheim, S. 481–498, doi:10.1002/9783527610174.ch4b.
- Biopharmazie und Pharmazeutische Technologie (Memento vom 1. Januar 2009 im Internet Archive), Beispiel mit dem Maars-Verfahren