Kraftgrößenverfahren
Das Kraftgrößenverfahren (KGV) ist ein Rechenverfahren zur Berechnung statisch unbestimmter mechanischer Systeme, das vornehmlich in der Baustatik angewandt wird. In der Praxis wurde das Verfahren mit dem Einzug der Finite-Elemente-Methode durch Stabstatikprogramme abgelöst, die in der Regel auf Grundlage des Weggrößenverfahrens (WGV) operieren. Das Kraftgrößenverfahren wird jedoch aufgrund seiner Anschaulichkeit zur Schulung des Verständnisses der Stabstatik und seiner historischen Bedeutung für das Bauingenieurwesen auch in der gegenwärtigen Zeit noch in den meisten Studiengängen des Bauingenieurwesens gelehrt.
Historische Aspekte
Das Kraftgrößenverfahren wurde im 19. Jahrhundert besonders durch Heinrich Müller-Breslau in Berlin für Rahmentragwerke ausgebaut. Christian Otto Mohr in Dresden favorisierte dagegen das Weggrößenverfahren, was zu einem wissenschaftlichen Disput führte. Wie Georg Prange jedoch 1916 nachwies, sind die beiden Verfahren mathematisch äquivalent (dual) zueinander. Zu dieser Zeit erhielt das Kraftgrößenverfahren den Vorzug gegenüber dem Weggrößenverfahren. Dieser Umstand änderte sich jedoch mit der Entwicklung und dem Einzug rechnergestützter Berechnungsverfahren, die in der Regel auf Basis der Finite-Elemente-Methode und somit dem Weggrößenverfahren arbeiten.
Motivation
Ein statisch unbestimmtes System hat mindestens eine Auflager- oder Schnittreaktion mehr als Gleichgewichtsbedingungen zur Berechnung vorliegen. Da bei Fragestellungen der Baustatik in der Regel die Auflager- und Schnittreaktionen die unbekannten Größen darstellen, reicht demnach die alleinige Betrachtung der Gleichgewichtsbedingungen – im Kontrast zu statisch bestimmten Systemen – nicht zur Berechnung der Auflager- und Schnittreaktionen aus. Die zusätzlichen Bedingungen zur Berechnung der Auflager- und Schnittreaktionen eines statisch unbestimmten Systems müssen, wie bei allen statisch unbestimmten Systemen, aus der zusätzlichen Betrachtung der Verformungsbedingungen abgeleitet werden.
Im Kraftgrößenverfahren werden die zusätzlichen Bedingungen unter Verwendung des Prinzips der virtuellen Kräfte aufgestellt. Hierzu werden in einem statisch unbestimmten System solange Bindungen gelöst, bis ein statisch bestimmtes, jedoch nicht kinematisches System vorliegt, das unter alleiniger Betrachtung der Gleichgewichtsbedingungen gelöst werden kann. An den Punkten der gelösten Bindungen werden im statisch bestimmten Hilfssystem (statisch bestimmtes Hauptsystem) infolgedessen die Verformungsbedingungen des statisch unbestimmten Systems nicht erfüllt. Um diese Verletzung der Verträglichkeit zu korrigieren, werden im Hilfssystem die korrespondierenden Auflager- oder Schnittreaktionen als Einheitsreaktionen angetragen und unter Verwendung des Prinzips der virtuellen Kräfte derart skaliert, dass sich die Verformungsbedingungen des statisch unbestimmten Systems einstellen. Die Auflager- und Schnittreaktionen des statisch unbestimmten Systems ergeben sich abschließend aus der Superposition der Auflager- und Schnittreaktionen infolge der Systembelastung und der skalierten Einheitsreaktionen des Hilfssystems.
Voraussetzungen
Das Kraftgrößenverfahren verlangt die vollständige Linearität des betrachteten, statisch unbestimmten Systems, da innerhalb des Verfahrens mehrfach das Superpositionsprinzip verwendet wird. Das Superpositionsprinzip findet einerseits bei der Berechnung der Verschiebungen und Verdrehungen infolge der Einheitsreaktionen und andererseits bei der Überlagerung der unterschiedlichen Belastungsfälle zur Bestimmung der Auflager- und Schnittreaktionen des statisch unbestimmten Systems Verwendung.
Die Forderung nach der vollständigen Linearität umfasst einerseits die physikalische Linearität und andererseits die geometrische Linearität. Die physikalische Linearität entspricht der Linearität des verwendeten Materialmodells, sodass beim Kraftgrößenverfahren das Hookesche Gesetz unterstellt werden muss und demnach physikalisch nichtlineare Effekte wie bspw. Viskosität, Plastizität oder Schädigung nicht berücksichtigt werden können. Die geometrische Linearität entspricht der Linearität der verwendeten Kinematik, sodass beim Kraftgrößenverfahren der linearisierte Verzerrungstensor zur Beschreibung der Verzerrungen unterstellt werden muss. In Konsequenz dessen können die Phänomene großer, nichtlinearer Verzerrungen wie Knicken oder Biegedrillknicken nicht berücksichtigt werden.
Algorithmus
1) Berechnung der statischen Unbestimmtheit des statisch unbestimmten Systems .


2) Wahl des Hilfssystems durch Lösung von Bindungen im statisch unbestimmten System , wobei die Wahl des Hilfssystems ein unverschiebliches System sein muss.

3) Antragung und Nummerierung der zu den gelösten Bindungen korrespondierenden Auflager- und Schnittreaktionen als Einheitsreaktionen mit im Hilfssystem .


4) Aufstellen der Belastungsfälle des Hilfssystems , wobei in der Regel der Belastung des statisch unbestimmten Systems zugeordnet wird und mit die Belastungsfälle infolge der Einheitsreaktionen gekennzeichnet werden.

5) Berechnung der Auflager- und Schnittreaktionen im Hilfssystem getrennt infolge der aufgestellten Belastungsfälle mit .


6) Berechnung der Verschiebungen und Verdrehungen an der Stelle im Hilfssystem infolge des Belastungsfalls unter Verwendung des Prinzips der virtuellen Kräfte.




7) Aufstellen und Lösen des Gleichungssystems zur Wiederherstellung der Verformungsbedingungen im statisch unbestimmten System , d. h. die Berechnung der Skalierungsfaktoren für die Einheitsreaktionen .

8) Bestimmung der Auflager- und Schnittreaktionen des statisch unbestimmten Systems durch Superposition der aufgestellten Belastungsfälle mit unter Verwendung der skalierten Einheitsreaktionen .



Vor- und Nachteile
Das Kraftgrößenverfahren besitzt im Kontrast zu konkurrierenden Verfahren, wie dem Weggrößenverfahren, das Alleinstellungsmerkmal als primäre Unbekannte die Kraftgrößen zu haben. Demnach ist das Kraftgrößenverfahren insbesondere dann effizient, wenn die Verschiebungen und Verdrehungen eines Systems von untergeordneter Relevanz sind. So kann das Verfahren bspw. durch geringen Aufwand zur Plausibilitätskontrolle von Berechnungen auf Grundlage der Finite-Elemente-Methode herangezogen werden.
Als nachteilhaft ist beim Kraftgrößenverfahren die freie Wahl des statisch bestimmten Hilfssystem zu nennen. Der Umstand der freien Wahl bedingt indirekt mehrere Aspekte negativ. Einerseits ist die Wahl des statischen bestimmten Hilfssystems bei hochgradig statisch unbestimmten Systemen kompliziert, da die Unverschieblichkeit des Hilfssystems definitiv gewährleistet sein muss und demnach die Unverschieblichkeit des Systems durch einen Widerspruch in der Konstruktion der Verschiebungsfigur durch einen Polplan gezeigt werden muss. Des Weiteren ist die Wahl des statisch bestimmten Hilfssystem – bis auf die Unverschieblichkeit – willkürlich, sodass in der Regel unendlich viele Hilfssysteme zur Verfügung stehen. Aus der Auswahl aller möglichen Hilfssysteme gibt es aus der Sicht eines Bearbeiters rechentechnisch einfachere und kompliziertere Hilfssystems zur Berechnung des statischen unbestimmten Systems. Die intuitive Wahl eines der einfacheren, statisch bestimmten Hilfssysteme ist jedoch computergesteuert nur schwerlich automatisierbar. Letztlich bedingt die Wahl des statisch bestimmten Hilfssystems die Konditionierung des Gleichungssystems zur Bestimmung der Skalierungsfaktoren der Einheitsreaktionen und somit auch die Ergebnisse der Auflager- und Schnittreaktionen des statisch unbestimmten Systems maßgeblich. Hierbei lässt sich die Konditionierung nicht a priori bestimmen, sondern ergibt sich lediglich während der Durchführung des Kraftgrößenverfahrens. Damit sich aus der Wahl des statisch bestimmten Hilfssystems ein besser konditioniertes Gleichungssystem ergibt, lässt sich lediglich mit einer Faustregel arbeiten. Diese Faustregel besagt, dass das Verformungsverhalten des statisch unbestimmten Systems und des statisch bestimmten Hilfssystems möglichst nah beieinander liegen sollten.
Beispiel
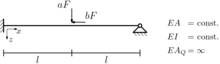
Zur Darstellung des Kraftgrößenverfahrens wird das rechts aufgezeigte, belastete System betrachtet. Es handelt sich um einen Einfeldträger der Länge mit einer festen Einspannung auf der linken Seite und einer gelenkigen, unverschieblichen Lagerung auf der rechten Seite. Das System ist durch eine Normalkraft der Größe und eine Querkraft der Größe in Feldmitte belastet. Die Dehn- und Biegesteifigkeit und werden als konstant vorausgesetzt. Wie in der Baustatik üblich wird das System als schubstarr mit einer Schubsteifigkeit von angenommen, sodass der Einfluss der Querkräfte im Arbeitssatz vernachlässigt werden kann. Im Vergleich zu einem statisch bestimmten Einfeldträger, existieren in diesem System zwei Bindungen mehr, sodass das vorliegende System zweifach statisch unbestimmt ist. Der Grad der statischen Unbestimmtheit lässt sich jedoch auch durch ein Abzählkriterium zeigen.







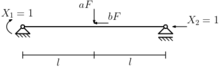
Bei der Wahl des statisch bestimmten Hilfssystems müssen zwei Bindungen im Vergleich zum vorliegenden System gelöst werden. Wie in der Abbildung rechts dargestellt, wird hier als statisch bestimmtes Hilfssystem ein Einfeldträger mit einer unverschieblichen, gelenkigen Lagerung und einer horizontal verschieblichen, gelenkigen Lagerung gewählt. Am statisch bestimmten Hilfssystem werden zusätzlich zur eigentlichen Normal- und Querkraftbelastung des Systems die zu den gelösten Bindungen korrespondierenden Einheitsreaktionen und als Belastungen angetragen.


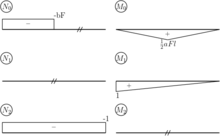
Somit ergeben sich am statisch bestimmten Hilfssystem insgesamt drei Belastungsfälle, die separat gelöst werden müssen. Die Ergebnisse für die relevanten Schnittreaktionen , und , sowie , und sind in der Abbildung rechts dargestellt.






Da infolge des Lösens der Bindungen im statisch unbestimmten System die Verschiebungsbedingungen durch das Hilfssystem nicht erfüllt werden, müssen die Einheitsreaktionen und so skaliert werden, dass die Verschiebungsbedingungen auch im statisch bestimmten Hilfssystem erfüllt werden. Hierzu wird das Prinzip der virtuellen Kräfte angewendet und die Verschiebungen an der Stelle infolge des Belastungsfalls bestimmt.



Die im Arbeitssatz auftretenden Integrale werden in der Baustatik oft unter Verwendung von Integraltafeln gelöst, wobei hier zur Integration die relevanten Ordinaten der Schnittreaktionen, deren Verläufe und die Integrationslänge eingehen. Für die Verschiebungen des vorliegenden Hilfsystems ergeben sich die nachstehenden Werte.





Damit sich im statisch bestimmten Hilfssystem an den Punkten der gelösten Bindungen die Verformungsbedingungen des statisch unbestimmten Systems ergeben, muss das folgende Gleichungssystem erfüllt werden.

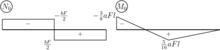
Die Auflager- und Schnittreaktionen des statisch unbestimmten Systems ergeben sich unter Superposition der berechneten Lastfälle am statisch bestimmten Hilfssystem in Verbindung mit den skalierten Einheitsreaktionen. Zur effizienten Berechnung der Schnittreaktionen können ausgewählte Punkte, wie bspw. das linke und rechte Balkenende und die Feldmitte, berechnet werden. Die Schnittreaktionen des statisch unbestimmten Systems sind in der Abbildung rechts dargestellt.
Die Superposition der Normalkräfte der drei Belastungsfälle ergibt die nachstehenden Werte am linken und rechten Rand sowie der Mitte des Einfeldträgers.


Analog ergeben sich die Biegemomente an den ausgewählten Punkten des Einfeldträgers.


Abschließend könnten noch zusätzlich die Querkräfte als Ableitung des Biegemoments und die Auflagerkräfte bestimmt werden.

Literatur
- Wilfried Krätzig: Tragwerke 1. Theorie und Berechnungsmethoden statisch bestimmter Stabtragwerke, Springerverlag, Berlin Heidelberg 2010, S. 201–252, ISBN 978-3-642-12283-5.
- Wilfried Krätzig: Tragwerke 2. Theorie und Berechnungsmethoden statisch unbestimmter Stabtragwerke, Springerverlag, Berlin Heidelberg 1990, S. 1–158, ISBN 978-3-540-52827-2.
- Karl-Eugen Kurrer: Geschichte der Baustatik. Auf der Suche nach dem Gleichgewicht, Ernst und Sohn, Berlin 2016, S. 481–493, ISBN 978-3-433-03134-6.