Humanoider Roboter
Ein humanoider Roboter ist ein hoch entwickeltes Maschinenwesen, genauer ein Roboter, dessen Konstruktion der menschlichen Gestalt nachempfunden ist. Häufig sind die Positionen der Gelenke und die Bewegungsabläufe eines humanoiden Roboters von den menschlichen Gelenkpositionen und Bewegungsabläufen inspiriert. Unter anderem läuft ein humanoider Roboter meistens auf zwei Beinen. Eine dem Menschen in seinem Aussehen und Verhalten besonders ähnliche Form des humanoiden Roboters ist der Androide.
Der Begriff "Humanoid" kann grundsätzlich auf alles angewendet werden, was einem Menschen ähnelt, aber keiner ist. Solange ein Kopf, ein Torso, zwei Arme und zwei Beine sowie ein aufrechter Gang im Umfang enthalten sind, ist die Bezeichnung Humanoid zutreffend.[1]
Geschichte


Die Idee des Baus eines künstlichen Menschen ist alt. Die griechische Mythologie berichtet, dass der Schmiedegott Hephaistos u. a. menschenähnliche Maschinenwesen gebaut habe. 1495 skizziert Leonardo da Vinci einen simplen Automaten, der wie ein Soldat in Rüstung aussieht. 1738 baut Jacques de Vaucanson einen mechanischen Flötenspieler. Bis zu diesem Zeitpunkt bezeichnet man solche mechanischen, menschenähnlichen Maschinen als Automaten.
Den Begriff Roboter prägte 1921 Karel Čapek, ein tschechischer Schriftsteller, in seinem Theaterstück R.U.R. (Rossum’s Universal Robots), das über künstliche Menschen handelt. Abgeleitet ist der Begriff Roboter dabei vom slawischen Wort rabota, das Arbeit bedeutet. 1927 schuf Fritz Lang in seinem Film Metropolis einen Maschinenmenschen mit weiblichem Aussehen, der im Verlauf des Films die Gestalt eines täuschend menschenähnlichen Androiden verliehen bekam.
Eine prototypische Realisierung, den humanoiden Roboter Elektro, stellte 1939 die Firma Westinghouse auf der Weltausstellung in New York vor.
1962 konstruierte der Wiener Claus Scholz einen humanoiden Roboter, den MM 7, der bereits sehr komplexe Bewegungsabläufe umsetzen konnte (Türen öffnen, Boden fegen oder Getränke aus einer Flasche in ein Glas einschenken). Er arbeitete allerdings nicht völlig autonom, sondern war sowohl für Stromversorgung als auch für Steuerbefehle von einer externen Einheit abhängig, mit der er über Kabel verbunden war. Der MM 7 ist erhalten und im Technischen Museum Wien untergebracht. Eines der größten Probleme, mit denen Scholz zu kämpfen hatte, war die Fortbewegung, die bei MM 7 und dessen Nachfolgemodell MM 9 nicht befriedigend gelöst werden konnte. Hier einen erfolgversprechenden Ansatz zu finden, war der nächsten Forschergeneration vorbehalten.
1970 schlug Miomir Vukobratović das Zero-Moment-Point-Prinzip vor. Mit Hilfe dieses Prinzips konnten die Bedingungen für statisch stabiles Laufen erfüllt werden. 1973 baute die Waseda-Universität den Wabot-1 und begann ein langjähriges Forschungsprogramm. 1980 wurde das MIT Leglab gegründet. 1984 spielte der Wabot-2 auf einer elektrischen Orgel. Seit 1986 arbeitete Honda an der E-Serie, aus der später die P-Serie und ASIMO hervorging. Parallel dazu werden seit circa 1990 passiv dynamische Läufer entwickelt, bei denen ein neuerer Ansatz für das Laufen verwendet wurde. Seit ca. 2004 laufen, gehen und rennen Roboter schneller und flexibler.
Forschung und Entwicklung
Der Entwicklung humanoider Roboter liegen zwei Hauptmotive zugrunde:
Künstliche Intelligenz
Heute gehen viele Wissenschaftler davon aus, dass die Konstruktion eines funktionellen humanoiden Roboters die Grundlage für die Erschaffung einer menschenähnlichen, künstlichen Intelligenz (KI) ist. Nach dieser Auffassung kann KI nicht einfach programmiert werden, sondern resultiert aus einem Lernprozess. Also müsste ein selbstlernender Algorithmus in das Gerät implementiert werden. Diesem Standpunkt liegen Beobachtungen aus der Lernpsychologie zugrunde. Der Roboter mit KI soll aktiv am sozialen Leben des Menschen teilnehmen und durch Beobachtung, Interaktion und Kommunikation lernen. Grundlage der Kommunikation ist eine zugrundeliegende Motivation auf beiden Seiten, die zumindest anfänglich der in der Eltern-Kind-Beziehung ähnelt. Die KI des Roboters kann sich nur dann optimal entwickeln, wenn er bereits in seinem Mindestfunktionsumfang als gleichwertiges Wesen anerkannt wird. Dazu muss er über eine menschliche Gestalt, Mobilität und Sensorik verfügen. Das derzeitige Ziel ist demnach eine möglichst hochwertige technische Kopie menschlicher Physiologie. Diese besondere technologische Herausforderung führt dazu, dass es für komplexe Teilaspekte separate Forschungsgruppen gibt, die einander zuarbeiten. Beispiele sind am Massachusetts Institute of Technology das Leg Laboratory, das Humanoider-Roboter-Projekt COG und das KI-Projekt Kismet.
Multifunktionale Arbeitsmaschine
Kostenintensive kommerzielle oder staatliche geförderte Humanoide-Roboter-Projekte beweisen eine hohe Erwartungshaltung an die zukünftige Wirtschaftlichkeit solcher Systeme. Der Lebensraum des Menschen (Gebäude, Verkehrsmittel, Werkzeuge oder Geräte) ist aus Kostengründen ökonomisch ausgerichtet und orientiert sich besonders an der menschlichen Physiologie.
Eine in Serie gefertigte Anzahl lernfähiger multifunktionaler humanoider Roboter erübrigt die Produktion, den Vertrieb und die Unterhaltung vieler Spezialroboter. Besonders Tätigkeiten, die aus mehreren komplizierten Arbeitsgängen bestehen, ließen sich einfach erledigen. Dem Menschen soll ein multifunktionaler Helfer zur Seite stehen, der ihm in seinem Umfeld Arbeit oder Zeit erspart oder für Unterhaltung sorgt. Japan hat ebenso wie Deutschland eine starke Alterung der Bevölkerung. Man hofft, durch den konsequenten Einsatz von diesen Alleskönnern Senioren im Alltag zu unterstützen oder Pflegepersonal zu entlasten. Um die Akzeptanz von Robotern in der Gesellschaft zu steigern, forscht das Socially Intelligent Machines Lab des Georgia Institute of Technology an den sozialen Kompetenzen von humanoiden Robotern.[2]
Aktueller Entwicklungsstand
Bisher hat kaum eine Entwicklung Marktreife erreicht, es handelt sich eher um Studien und Mittel des Marketings. Zu den aktuellen Fähigkeiten gehören unter anderem:
- gehen, rennen[3], auf einem Bein hüpfen, tanzen[4], bewegte Hindernisse umlaufen[5], Treppen steigen[6], in unwegsamem Gelände laufen, Tür öffnen, heftige Stösse von außen ausbalancieren, nach Hinfallen wieder aufstehen[7]
- Tablettwagen schieben, Tablett entgegennehmen, transportieren, übergeben, servieren[8]
- Gebärdensprache[9]
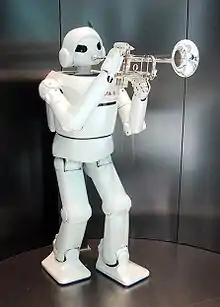
- Trompete spielen[10], Geige spielen[11], in Band Musik spielen[12]
- Rad fahren[13], Ball fangen und werfen[14]
- Getränke einschenken[15], Spülmaschine ein- und ausräumen[16], Tätigkeiten im Haushalt wie z. B. Kochen[17], Fenster wischen und den Boden kehren[18], Lasten tragen, Kisten aufheben und einräumen[7]
Kommerzielle Projekte humanoider Roboter
- ASIMO (Honda) – in Vermietung
- Atlas von Boston Dynamics[19]
- HOAP-1 und -2 (Fujitsu)[20] – eine humanoide Roboter-Serie, welche auch kommerziell zu Forschungszwecken vertrieben wird
- Toyota-Roboter (Toyota) – Unterhaltungsroboter[21]
- Qrio (Sony) – Weiterentwicklung im März 2006 eingestellt
- Wakamaru (Mitsubishi) – im Verkauf
- Ri-man, Japan
- REEM-A und REEM-B, beide von Pal Technology
- Pepper im Verkauf seit 2015
- PETMAN von Boston Dynamics[22] Prototyp eines Humanoiden Roboters, eingesetzt beim Testen von Schutzanzügen des US-amerikanischen Militärs
- Nao, Spielzeugroboter von Aldebaran Robotics
- Alpha 1S von UBTECH
- Tesla Bot (Optimus) Tesla Bot Projekt von Tesla
Projekte humanoider Roboter in der KI-Forschung
- Cronos, Labor für künstliche Intelligenz Universität Zürich im Rahmen des ECCE-Robot Projekt der EU
- RobotCub, italienisch/britisches universitäres Konsortium
- COG, Kismet, Massachusetts Institute of Technology
- ERATO Synergistic Robotics, Universität Osaka
- HUBO Labs am KAIST in Südkorea bauen und forschen an lebensgroßen humanoiden Robotern
In Deutschland forschen unter anderem folgende – meist universitäre – Einrichtungen mit humanoiden Robotern:
- Rheinische Friedrich-Wilhelms-Universität Bonn (NimbRo)
- Freie Universität Berlin (FUmanoids)
- Beuth Hochschule für Technik Berlin (Forschungslabor Neurorobotik, Roboter Myon)
- Technische Universität Berlin (DAI Labor)
- Technische Universität Darmstadt (Darmstadt Dribblers)
- Universität Bremen (B-Human)
- HTWK Leipzig (HTWK Robots)
- Technische Universität Dortmund (DoH!Bots)
- Universität der Bundeswehr München (HERMES)
- Karlsruher Institut für Technologie (ARMAR III)
- Technische Universität München (Johnnie, Lola)
- Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (Rollin' Justin[23], TORO[24])
Studiengänge
Die Beuth Hochschule für Technik Berlin bietet den bisher bundesweit einzigen Studiengang zu humanoider Robotik an.[25][26] Daneben lässt sich das Thema in übergeordneten Studiengängen wie der Robotik, Automation und Regelungstechnik verschiedener Einrichtungen vertiefen. Im internationalen Kontext bietet beispielsweise das einen Imperial College London einen entsprechenden Master-Studiengang an.[27]
Weblinks
- Boris Hänßler: Die Humanoiden kommen. In: Spektrum der Wissenschaft, 11. Oktober 2013.
Einzelnachweise
- Androiden, Cyborgs, Humanoiden - alles Roboter? Automat, abgerufen am 2. Juni 2021.
- Socially Intelligent Machines Lab
- Asimo rennend auf YouTube
- Roboter tanzend auf YouTube
- Roboter umläuft bewegte Hindernisse auf YouTube
- DARPA Robot Masters Stairs auf YouTube
- Atlas, The Next Generation auf YouTube
- new version amazing robot asimo auf YouTube
- All-New ASIMO Humanoid Robot – Sign Language auf YouTube
- Roboter spielt Trompete auf YouTube
- Robot Violinist auf YouTube
- Roboter Musik Quartett auf YouTube
- Roboter fährt Rad auf YouTube
- Playing Catch and Juggling with a Humanoid Robot auf YouTube
- Honda’s All-new ASIMO Prepares and Serves Refreshments auf YouTube
- siehe Armar 3
- Roboter für den Haushalt
- Roboter kehrt den Boden und wischt Fensterscheibe auf YouTube
- Atlas, The Next Generation
- Humanoid Robot HOAP-1 (Memento des Originals vom 21. Dezember 2007 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. und HOAP-2 (Memento des Originals vom 11. September 2007 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. (englisch) – eine humanoide Roboter-Serie von Fujitsu
- spiegel.de: Toyotas Fiedel-Robbi
- bostondynamics.com
- Mobile Humanoid „Rollin' Justin“ auf der DLR-Website des Instituts für Robotik und Mechatronik
- TORO auf der DLR-Website des Instituts für Robotik und Mechatronik
- Katharina Juschkat: Studium. Erstmals „Humanoide Robotik“ als Studiengang angeboten. In: Elektrotechnik Automatisierung. Vogel Communications Group GmbH & Co. KG, Ines Stolz, 13. April 2018, abgerufen am 29. Oktober 2019.
- Nadine Emmerich: Studiengang Humanoide Robotik. Roboter studieren. In: ZDF.de. Zweites Deutsches Fernsehen (ZDF), 18. August 2018, archiviert vom Original am 29. Oktober 2019.
- MSc Human and Biological Robotics. In: Imperial College London. Department of Bioengineering. Abgerufen am 29. Oktober 2019 (englisch).