Laufroboter
Laufroboter sind spezielle Roboter, die sich mit Hilfe von „Beinen“ bewegen können. Dies ist bereits mit nur einem „Bein“ (hüpfend) möglich. In der Regel werden jedoch vierbeinige, sechsbeinige oder auch zweibeinige Maschinen verwendet. Es gibt Maschinen die noch mehr Beine haben, diese lassen sich jedoch auf die sechsbeinige Variante zurückführen.
Geschichte und Hintergrundinformationen
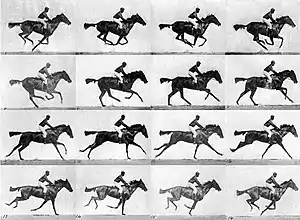
Ein früher Untersuchungsgegenstand waren die verschiedenen Pferdegangarten. Der Fotograf Eadweard Muybridge nahm den Galopp eines Pferdes mit einer speziell dafür entwickelten Aufnahmetechnik auf und konnte so fotografisch belegen, dass in dieser Gangart das Pferd zu verschiedenen Zeiten mit nur einem Huf den Boden berührt und zu anderen Zeiten überhaupt nicht. Obwohl sich das Pferd zu jedem einzelnen Augenblick in einem nicht stabilen Zustand befindet, ist es dennoch insgesamt stabil.
Damit Laufroboter ihre Aufgabe erfüllen können, muss die Abfolge der Bewegungen und die Reaktion auf Störeinflüsse genau festgelegt sein. Bei Rädern sind dies axiale Drehungen und gelegentliche Lenkungsbewegungen, während eine Maschine mit „Beinen“ mehrere Bauteile abgestimmt im Raum und in der Zeit koordiniert bewegt.
Bei Maschinen, die mindestens sechs Beine haben (Sechsfüßer, Tausendfüßer, Spinnentiere mit mindestens acht Beinen) befinden sich stets mindestens drei Beine auf dem Boden, so dass die Maschine in jedem Moment stabil ist.
Bereits bei Vierfüßern kann ein einigermaßen stabiler Stand nur erreicht werden, wenn jeweils drei Beine auf dem Boden stehen. Am Beispiel der Tiere erkennt man aber, dass damit keine hohe Laufgeschwindigkeit erreicht werden kann.
Geh- und Laufverhalten
Statisches Gehen
Statisches Gehen liegt vor, wenn der Schwerpunkt eines Roboters sich zu jedem Zeitpunkt über den Füßen befindet, so dass er ohne Einwirken einer äußeren Kraft nicht umfallen kann.
Dynamisches Gehen und Laufen
Dynamisches Gehen liegt vor, wenn der Schwerpunkt eines Roboters sich auch außerhalb des Bereiches der Füße befinden kann, ohne dass der Roboter zu Fall kommt. Tatsächlich könnte man von einem „kontrollierten Fallen“ sprechen, da der Roboter bei einem plötzlichen Stopp seiner Bewegung fallen würde.
Vom dynamischen Laufen spricht man, wenn die zur Aufrechterhaltung der Geschwindigkeit notwendige Bewegung dazu führt, dass zeitweise kein Bein des Roboters mehr den Boden berührt.
Statische Laufroboter
Der klassische Laufroboter besteht aus Aktoren, Sensoren und einer Computersteuerung. Die "Beine" werden meist von Servomotoren so bewegt, dass ein vorgegebenes Bewegungsprogramm abgespult wird.
Zweibeinige statische Laufroboter
Der Roboter ASIMO bewegt sich dabei mit einer Maximalgeschwindigkeit von 6 km/h, bei einer Größe von 1,30 m und einem Gewicht von 52 kg und er benötigt dafür sehr viel elektrische Energie. Eine besondere Fähigkeit von ihm ist, dass er Treppen steigen kann.
Sechsbeinige Laufroboter



Sechsbeinige Konstruktionen sind eine ideale Grundlage für statisch stabile Laufroboter. Sie sind damit für die Bewegung in unebenem Gelände geeignet. Es werden zwei Gangarten (Reihenfolge der Beinbewegungen) unterschieden:
- Tripod-Gang
- Tetrapod-Gang
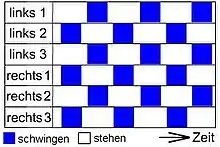
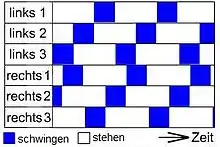
Beim Tripod-Gang sind zu jedem Zeitpunkt drei Beine am Boden (Beispiel: Indische Stabschrecke, mit 3 Stand- und 3 Schwingbeinen).
Beim Tetrapod-Gang sind stets vier Beine am Boden (4 Standbeine, 2 Schwingbeine).
Bei Gehmaschinen mit sechs orthogonalen Beinen wird außer nach der Reihenfolge der Beinbewegungen auch noch nach der prinzipiellen Bewegungsart der Beine unterschieden:
- Folgeläufer (follow the leader) (z. B. Tripod-Gang, Tetrapod-Gang)
- Zirkelläufer (circulation walker)
- Webläufer (weaving walker)
Sechsbeinige Lebewesen laufen als Folgeläufer. Ein Bein folgt (in welcher Reihenfolge auch immer) dem anderen. Maschinen können mehr. Beim Zirkelläufer haben die drei Beine der rechten Seite eine gemeinsame Drehachse – wie die Zeiger einer Uhr (entsprechend auch die linken Beine). Das hinterste Bein wird vor das vorderste Bein geschwungen. Wie soll nun aber das hinterste Bein an den anderen beiden Beinen vorbeikommen? Es schwingt einfach unter dem Bauch (der Roboterplattform) durch.
Auch der Webläufer führt eine biologisch unmögliche Bewegung aus. Beim Webläufer sitzen alle sechs Beine auf einer gemeinsamen vertikalen Achse im Mittelpunkt der Plattform. Jedes Bein kann komplett um den ganzen Körper herumwandern (eine horizontale Teleskopbewegung macht es möglich). Die Beine wandern von ihrer hintersten Position auf die vorderste Position, indem sie um die beiden anderen Beine außen rumgeführt werden.
Beim Gehen im unebenen Gelände ist es entscheidend, dass der Roboter innerhalb seiner Schrittweite (potenzielles Aufsetzgebiet des Beines – foothold selection area) einen sicheren Aufsetzpunkt findet, ohne zu weit von seiner Hauptmarschrichtung abweichen zu müssen.
Dynamische Laufroboter
Passive dynamische Läufer
Laufroboter, die sich ohne Energiequelle bewegen können, beruhen auf einem vor 150 Jahren erfundenen Spielzeug. Es musste nur angestoßen werden und konnte daraufhin einen kleinen Abhang alleine herunter laufen. Dazu schaukelt das Spielzeug von rechts nach links und schwingt das gerade angehobene Bein ein Stück nach vorne. Dann schaukelt es von links nach rechts und das andere Bein schwingt vor.
Mit dieser Konstruktion kann sich das Spielzeug energieeffizient bewegen und als Ausgangsmodell für technisch höher entwickelte Laufroboter dienen. Tad McGeer hatte in den 80er-Jahren das in diesem Spielzeug verwirklichte Prinzip des Pendels zur Stabilisierung der Bewegungen herangezogen. Nicht mehr ein komplexes und langsames Regelsystem in einem mitgeführten Computer sollte den Roboter zum Laufen bringen, sondern der Aufbau des Bewegungsapparates sollte den Laufroboter ohne zusätzliches Tun stabilisieren. Wird die Konstruktion des einfachen Spielzeugs noch mit einer „Hüfte“ oder mit „beweglichen Füßen“ ergänzt, dann benötigen derartige Laufroboter nur noch Energie beim Beschleunigen der bewegten Massen und nicht mehr wie bei früheren Laufrobotern auch beim Abbremsen.
Siehe auch
Literatur
- René Steiner: Attraktorregelung für die Fortbewegung einer simulierten zweibeinigen Laufmaschine in drei Dimensionen. dissertation.de, Berlin 1999, ISBN 3-933342-26-0.
- Stefan Piekenbrock: Reaktive Steuerung einer sechsbeinigen Laufmaschine in unbekannter Umgebung. Shaker Verlag, Aachen 1996, ISBN 3-8265-1313-4.
- Winfried Ilg: Eine biologisch motivierte adaptive Bewegungssteuerung für eine vierbeinige Laufmaschine. Akademische V.-G. Aka, Berlin 2001, ISBN 3-89838-245-1.
- Martin Pfrommer, Yordan Todorov: Regelungskonzepte für die Beinregelung des Laufroboters Lauron IVb. Grin Verlag, 2008, ISBN 978-3-640-22283-4.
Weblinks
- Der "Terminator" lernt laufen – Artikel bei Telepolis, vom 18. Februar 2005
- Laufroboter erobern das freie Gelände -- langsam – Artikel bei heise online, vom 1. Oktober 2005
- The Walking Machines Catalogue (englisch)
- Linkliste zweibeinige Laufroboter (englisch) – zusammengestellt vom Department of Mechanical Engineering an der Vrije Universiteit Brussel
- Heise.de: Mechanisch im Gleichgewicht, 8. Mai 2017 – ein passiv dynamischer Läufer, genannt Planar Elliptical Runner.