Eigenbewegung (Regelungstechnik)
Eigenbewegung oder freie Bewegung bezeichnet in der Regelungstechnik die Bewegung, die ein System allein durch seine Anfangsauslenkung des Zustands ohne Erregung von außen ausführt. Durch sie ist eine Aussage über die Stabilität eines Systems möglich.
Aussage über die Stabilität durch die Eigenbewegung
Lineare Systeme
Bei linearen Systemen gelten die folgenden Aussagen global, wenn sie einmal nachgewiesen sind, da die Systemeigenschaften nicht von den Zuständen x abhängen.
Für ein System (a ist die Beschleunigung) gilt:

- bei : die Eigenbewegung klingt ab und das System geht bei linearen Systemen asymptotisch in den Ruhestand über (asymptotisch stabil).
- bei : das System verharrt im Ausgangszustand .
- bei : die Eigenbewegung klingt auf, das bedeutet bei linearen Systemen ein exponentielles Wachstum über alle Grenzen.





Bei linearen Mehrgrößensystemen in Zustandsraumdarstellung kann diese Eigenschaft über die Realteile der Eigenwerte nachgewiesen werden. Dabei gilt:

- Sind alle , so ist das System stabil.
- Sind alle , so ist das System an der Stabilitätsgrenze.
- Ist mindestens ein , so ist das System instabil.



Nichtlineare Systeme
Bei nichtlinearen Systemen ist der globale Nachweis dieser Eigenschaften schwieriger, jedoch kann durch sie eine lokale Aussage über die Stabilität gemacht werden.
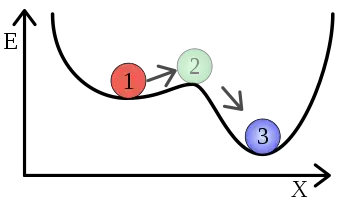
Ein nichtlineares System kann auch metastabil sein, d. h. das System kann in einem gewissen Bereich stabil sein, dann aber ab einem gewissen Zustand instabil werden oder in einen anderen Ruhepunkt übergehen. Deshalb ist für den Nachweis der global asymptotischen Stabilität bei nichtlinearen Systemen eine komplexere Analyse notwendig, z. B. über die Ljapunov-Funktion.
Bei der Analyse über die Ljapunov-Funktion wird der energetische Zustand eines Systems betrachtet. Nimmt die Energie eines autonomen Systems stetig ab, so muss dies auch für die Zustandsgrößen gelten. Sie beruht also auf einem ähnlichen Grundsatz, siehe dazu auch Stabilitätstheorie.
Erzwungene Bewegung
Bei der erzwungenen Bewegung wird die Reaktion des Systems auf ein Eingangssignal u(t) überprüft. Typische Eingangssignale sind die Sprungfunktion oder periodische Signale.
Die Reaktion setzt sich dabei additiv aus der freien und der erzwungenen Bewegung zusammen.
Bei der Sprungfunktion gilt:

Für diese Funktion ist ein Tanksystem ohne Ausfluss (integrales Verhalten) instabil, aber z. B. ein Motor stabil, da er kein integrales Verhalten besitzt.
Folgende Fälle können unterschieden werden:
- das System nähert sich asymptotisch dem Endwert.
- das System wächst über alle Grenzen.
Diese Untersuchung ist insbesondere bei metastabilen – also nichtlinearen – Systemen von Bedeutung, da es bei ihnen zu größeren Abhängigkeiten von der Eingangsgröße kommen kann.
Zudem wird die erzwungene Bewegung oft zur Charakterisierung von Systemen verwandt.
Siehe auch
- Polstelle
- Nullstelle
- Eigenfrequenz; das ist die Frequenz, mit der ein schwingfähiges System nach einmaliger Anregung schwingen kann (bei Vernachlässigung der Dämpfung)
Literatur
- Jan Lunze: Regelungstechnik Bd. 1. Springer Verlag, 2005, ISBN 3-540-28326-9.
- Jan Lunze: Regelungstechnik Bd. 2. Springer Verlag, 2006, ISBN 3-540-32335-X.