Polykonvexe Funktion
Eine polykonvexe Funktion nach John M. Ball ist in der Mathematik eine Funktion des Deformationsgradienten, seines Kofaktors und seiner Determinante, die in allen drei Argumenten eine konvexe Funktion ist. In dieser Definition wurde ein dreidimensionaler Raum voraus gesetzt und dieser anschauliche und wichtige Fall wird auch im Folgenden zugrunde gelegt.
Ein reales hyperelastisches Material deformiert sich unter Krafteinwirkung so, dass seine Formänderungsenergie minimiert wird. Wenn die spezifische Formänderungsenergie eine polykonvexe, koerzitive Funktion der Deformation ist, dann garantiert das die Existenz einer die Formänderungsenergie minimierenden Deformation. Für isotrope Hyperelastizität liegen eine Reihe von spezifischen Formänderungsenergiefunktionen vor, die polykonvex und koerzitiv sind.
Für den Fall anisotroper Hyperelastizität stellte J. M. Ball die Frage: „Are there ways of verifying polyconvexity […] for a useful class of anisotropic stored-energy functions?“ (zu Deutsch: „Gibt es Wege die Polykonvexität […] für eine nützliche Klasse von anisotropen Formänderungsenergiefunktionen nachzuweisen?“)[L 1] Die Suche nach der Antwort auf diese Frage ist noch im einundzwanzigsten Jahrhundert Gegenstand der Forschung.
Definition
Gegeben sei die Menge L(V,V) der Tensoren zweiter Stufe, die Vektoren aus dem dreidimensionalen euklidischen Vektorraum V linear aufeinander abbilden. Sei P die Menge der Tensoren mit positiver Determinante. Eine Funktion ist polykonvex, wenn es eine konvexe Funktion


gibt, für die gilt

Der Kofaktor eines Tensors mit positiver Determinante ist die transponierte Adjunkte: Das Superskript „┬“ steht für die Transposition und −1 für die Inverse.

Anmerkungen:
- Die Summe zweier polykonvexer Funktionen ist wieder polykonvex.
- Der Deformationsgradient (übliches Formelzeichen F) ist ein Tensor zweiter Stufe mit positiver Determinante. Bei Nicht-Deformation ist der Deformationsgradient gleich dem Einheitstensor 1.
- Die konvexe Hülle der Menge P der Tensoren mit positiver Determinante ist die Menge L aller Tensoren.[F 1] Darauf aufbauend kann gezeigt werden, dass die Menge die konvexe Hülle der Menge ist.
- Statt Tensoren zweiter Stufe können ganz analog auch Matrizen zugrunde gelegt werden.[L 2]


Hooke’sche, isotrope, lineare Elastizität
Die spezifische Formänderungsenergie im Hooke’schen Gesetz lautet bei Isotropie

Sie wird mit dem Green-Lagrange’schen Verzerrungstensor E gebildet und enthält zwei Materialparameter λ und μ, die die erste bzw. zweite Lamé-Konstante darstellen. Diese spezifische Formänderungsenergie ist nicht polykonvex, siehe auch das #Beispiel unten. In der Funktion

können jedoch die Parameter so angepasst werden, dass Ŵ die spezifische Formänderungsenergie im Hooke’schen Gesetz bis auf Terme dritter Ordnung in ||E|| gemäß


approximiert und polykonvex ist. Der Betrag eines Tensors ist hier seine Frobeniusnorm die mit dem Frobenius-Skalarprodukt „:“ zweier Tensoren A und B definiert ist:


Der Operator Sp bildet die Spur seines Argumentes, die Funktion ln ist der natürliche Logarithmus und das Landau Symbol steht für Terme, die x in mindestens dritter Ordnung enthalten und bei vernachlässigt werden können.


Mit einer beliebigen Wahl von x aus dem offenen Intervall ]0,1[ lauten die Parameter:

Mit diesen Parametern erfüllt die Funktion Ŵ auch die Koerzitivitätsbedingung[L 3]

Beispiele polykonvexer Funktionen
Die Summe zweier polykonvexer Funktionen ist wieder polykonvex. So lassen sich komplexe polykonvexe Funktionen durch Summation aus einfachen zusammensetzen, von denen einige hier angegeben seien.
Determinante
Der Spezialfall

zeigt, dass die Determinante keine konvexe Funktion ist. Nichtsdestotrotz ist die Funktion polykonvex, weil W(x)=x eine konvexe Funktion von x ist und dem tut auch x=det(F) keinen Abbruch.

Betrag eines Tensors
Die Funktion ist polykonvex, weil der Betrag eines Tensors wegen


eine konvexe Funktion ist. Durch das oben definierte Frobenius-Skalarprodukt, der Addition und Skalarmultiplikation von Tensoren bilden die Tensoren einen Skalarproduktraum, in dem der Winkel ∠(H, G) zwischen zwei Elementen H und G des Skalarproduktraums durch das Skalarprodukt definiert ist. In der Ungleichung oben wurde neben der Tatsache, dass der Cosinus „cos“ eines Winkels kleiner oder gleich eins ist, ausgenutzt, dass in konvexen Funktionen gilt und hier[F 2]


einzusetzen ist. Das Betragsquadrat ||F||² ist als Positivkombination von zwei konvexen Funktionen ebenfalls konvex. Als Konsequenz hieraus ist die Funktion

mit und einer konvexen Funktion polykonvex.[L 4]


Invarianten des rechten Cauchy-Green Tensors
Der rechte Cauchy-Green Tensor C=F┬·F bildet sich aus dem Deformationsgradienten F und besitzt die Hauptinvarianten

Die Hauptinvarianten des rechten Cauchy-Green Tensors geben die Maße der Linien-, Flächen- und Volumenelemente bei einer Deformation an und sind polykonvexe Funktionen, weil das Betragsquadrat eines Tensors eine polykonvexe Funktion des Tensors ist.
Ogden-Modell
Die Funktion

die mit den sämtlich positiven Eigenwerten des rechten Strecktensors gebildet wird, ist polykonvex, wenn die Koeffizienten ai und bj positiv sind, die Exponenten γi und δj größer oder gleich eins sind und k(x) für positive Argumente x eine konvexe Funktion ist. Die Konstante w ist so anzupassen, dass Ŵ(1) verschwindet. Dann genügt Ŵ auch der Koerzitivitätsbedingung



Die Funktion eines Tensors, beispielsweise seine Wurzel, berechnet sich mit der Hauptachsentransformation des Tensors, Bildung der Funktionswerte der Diagonalglieder und Rücktransformation. Mit dem rechten Strecktensor schreibt sich obige Funktion

Diese spezifische Formänderungsenergie definiert das Ogden-Modell.[L 5]
Neo-Hooke Modell mit Kompressibilität
Die spezifische Formänderungsenergie

ist polykonvex, wenn k(x) für positive Argumente x eine konvexe Funktion ist. Die Konstante w ist so anzupassen, dass Ŵ(1) verschwindet. Das Betragsquadrat des Deformationsgradienten ist – wie oben gezeigt – die erste Hauptinvariante (Spur) des rechten Cauchy-Green Tensors.[L 6]
Mooney-Rivlin Modell mit Kompressibilität
Die spezifische Formänderungsenergie

ist polykonvex, wenn k(x) für positive Argumente x eine konvexe Funktion ist. Die Konstante w ist so anzupassen, dass Ŵ(1) verschwindet. Das Betragsquadrat des Deformationsgradienten und seines Kofaktors sind – wie oben gezeigt – die erste und zweite Hauptinvariante des rechten Cauchy-Green Tensors.[L 7]
Beispiel
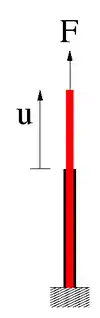
Ein homogener Zylinder mit Länge L, Querschnittsfläche A und Volumen V=AL aus einem hyperelastischen Material wird wie im Bild mit einer Kraft F einachsial auf Zug oder Druck belastet. Wegen der Achsensymmetrie werden Zylinderkoordinaten R und Z benutzt. Der Zusammenhang zwischen den ursprünglichen Koordinaten eines materiellen Punktes (R, Z) und den aktuellen (r, z) lautet mit den Streckungen α in z-Richtung und β in radialer Richtung:

Der Vektor mit den Komponenten u und v stellt die Verschiebungen eines materiellen Punktes in z- bzw. r-Richtung dar. Der Deformationsgradient und der Green-Lagrange’sche Verzerrungstensor ergeben sich zu

Der Gradient GRAD wird hier mit Ableitungen nach den materiellen Koordinaten (R,Z) gebildet und deshalb groß geschrieben. Die Matrizendarstellungen beziehen sich auf das Basissystem Beim Hooke’schen Gesetz lautet der Spannungstensor im einachsialen Zug


Die radiale Normalspannung verschwindet mit der Konsequenz

Die Zusammenhänge zwischen den elastischen Konstanten λ, μ, ν und E können bei den Lamé-Konstanten nachgeschlagen werden. Die Formänderungsarbeit ist das Volumenintegral über die im Volumen konstante spezifische Formänderungsenergie:

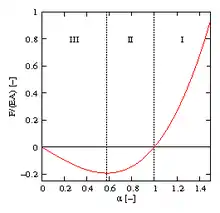
Aus der Gleichheit mit der Arbeit der Kraft ergibt sich:

Der Kraftverlauf ist im Bild dargestellt. Im Zugbereich I und im Druckbereich II findet sich zu jeder Kraft eine Streckung α, so dass das System im Gleichgewicht ist. Im Bereich III ist das System instabil: Bei einer Belastung mit würde der Stab (sein mathematisches Modell) kein Gleichgewicht finden und auf null Länge kollabieren, was natürlich unphysikalisch ist.

Im Neo–Hooke Modell lautet der erste Piola-Kirchhoff’sche Spannungstensor P und der Cauchy’sche Spannungstensor , wenn a=E und mit einem weiteren Materialparameter K≥E ist:



Weil die radialen Spannungen verschwinden ergibt sich für die radiale Streckung β:

Der Parameter w in der Formänderungsenergie wird so angepasst, dass die Formänderungsenergie im undeformierten Ausgangszustand bei F=1 verschwindet:

Die Formänderungsenergie berechnet sich damit zu:

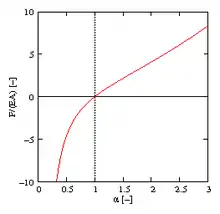
und Gleichgewicht mit der Einzelkraft F gemäß dWi=dWe erbringt bei K=E, siehe Bild rechts:

Hier findet sich also zu jedem Kraftniveau eine dazugehörende Streckung und das Material ist in allen Bereichen stabil.
Fußnoten
- Um das zu zeigen, ist zunächst festzustellen, dass der negative Einheitstensor Element der konvexen Hülle ist, beispielsweise anhand von
- Die Fréchet-Ableitung einer skalaren Funktion nach einem Tensor
ist der Tensor für den - sofern er existiert - gilt:







Literatur
- J. M. Ball: Convexity conditions and existence theorems in non-linear elasticity. In: Archive for Rational Mechanics and Analysis. Band 63, 1977, S. 337–403.
- P. G. Ciarlet: Mathematical Elasticity - Volume I: Three-Dimensional Elasticity. North-Holland, 1988, ISBN 0-444-70259-8.
Einzelnachweise
- Paul Newton, Philip Holmes (Hrsg.): Geometry, Mechanics and Dynamics. Springer, 2002, ISBN 978-0-387-95518-6, S. 3–59 (Der Beitrag von J. M. Ball hat den Titel Some open problems in elasticity (Einige offene Probleme in der Elastizität)).
- Ciarlet (1988), S. 162.
- Ciarlet (1988), S. 185ff.
- Ciarlet (1988), S. 176
- Ciarlet (1988), S. 181ff
- Ciarlet (1988), S. 189
- Ciarlet (1988), S. 189