Kappelmotor
Der Kappelmotor (PAD-Motor) beruht auf einer von Andreas Kappel 1999 erfundenen Kinematik, welche Linearbewegungen effizient in Rotation umsetzt.[1] Das Patent des „Kappelmotor“ wurde von Noliac A/S im Jahr 2010 übernommen.
Funktionsprinzip
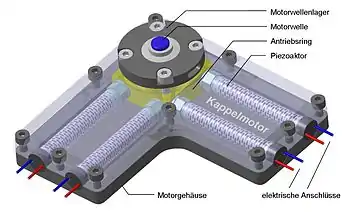
Die Kinematik besteht aus einem Antriebsring, welcher eine drehbar gelagerte Motorwelle umschließt, wobei der Antriebsring gegenüber dem Außendurchmesser der Motorwelle einen geringfügig größeren Innendurchmesser aufweist. Wird der Antriebsring kreisförmig verschoben, rollt die Motorwelle auf der Innenfläche des Antriebsringes ab und wird dadurch in Rotation versetzt. Zur Erzeugung der Verschiebebewegung können Piezokeramik-Stacks verwendet werden. Wird an den einen Piezoaktor eine Sinusspannung und an den anderen Piezoaktor eine Cosinusspannung angelegt, so überlagern sich die 90 Grad phasenversetzten sinusförmigen mechanischen Auslenkungen der Piezoaktoren zu der gewünschten kreisförmigen Verschiebebewegung des Antriebsringes. Die Drehrichtung wird durch das Vorzeichen der Phasenverschiebung ± 90° festgelegt. Die Drehzahl ist durch die Frequenz des Steuersignals bestimmt.
Kraftübertragung
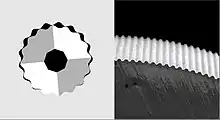
Für ein formschlüssiges Abrollen sind die Kontaktflächen von Welle und Antriebsring mit einer Verzahnung versehen. Dadurch kann die Motorwelle auch unter hohen Lastmomenten sehr präzise mit hoher Dynamik in jede Drehwinkelstellung positioniert werden. Dazu werden spielfreie Mikroverzahnungen eingesetzt, die sowohl aus Metall, als auch aus Kunststoff bestehen können. Das Untersetzungsverhältnis ergibt sich aus der Zähnezahldifferenz von Antriebsring und Motorwelle zu der Gesamtzähnezahl der Motorwelle und kann von 1:10 bis 1 : mehrere Hundert betragen. Um einen ständigen Verzahnungseingriff zu gewährleisten, ist die Zahnhöhe kleiner als die Auslenkung der Piezoaktoren. Dadurch ergeben sich bei Piezostapelaktoren Zahnhöhen im Bereich einiger 10 Mikrometer. Durch die zykloidische Zahnform ist die Stahl-Mikroverzahnung absolut überlastsicher und kann auch durch Blockade nicht beschädigt werden. Dieses gilt auch für Kunststoffverzahnungen, die sich im Überlastfall reversibel elastisch verformen. Der Wirkungsgrad der mikroverzahnten Kinematik des Kappelmotors liegt bei ca. 95 %.
Ansteuerung

Die einfachste Ausführung des Kappelmotors besteht aus zwei rechtwinklig am Antriebsring befestigten Piezoaktoren. Durch die Verwendung von Piezo-Stacks als Aktoren ist unter Ausnutzung des piezoelektrischen Effektes eine Echtzeit-Erfassung von Lastmomenten sowohl bei laufendem wie bei stehendem Motor möglich. Da die Drehstellung der Motorwelle immer synchron zur absoluten elektrischen Phase ist, wird einen gesteuerter open-loop Betrieb möglich. Dadurch werden komplexe Bewegungsprofile, bei der mehrere Einzelantriebe koordiniert zusammenwirken sollen, einfach beherrschbar. Elektromotorische Servosysteme benötigen hierfür eine Vielzahl zusätzlicher Komponenten wie Getriebe, Encoder, Drehmomentsensor oder eine Motorbremse sowie einen geschlossenen Regelkreis. Diese Komponenten können bei Kappelmotoren mit entsprechender Regelelektronik ersatzlos entfallen.
Ausführungen
Kappelmotoren sind grundsätzlich in den Bauformen planar und zylindrisch realisierbar. Die Drehmomente reichen von einigen Millinewtonmetern bis zu mehreren 10 Nm.

Planar
Abhängig von den Leistungs- und Gehäuseanforderungen, kann die Kinematik des Kappelmotors in unterschiedlichen Materialsystemen ausgeführt oder mit anderen Aktoren kombiniert werden. Beispielhaft hierfür ist ein in Kunststoffspritzgusstechnik hergestellter Zeigerantrieb, bei dem die Linearbewegungen zweier piezoelektrischer Biegeaktoren zu einer kreisförmigen Verschiebebewegung des Antriebsringes überlagert werden. Der im Vergleich zu Stapelaktoren erheblich größere Arbeitshub der piezoelektrischen Biegeaktoren von einigen ± 100 µm gestattet gröbere Verzahnungsstrukturen, die mittels Kunststoffspritzguss herstellbar sind.
Zylindrisch
Für zylindrische Motorbauformen werden die piezoelektrischen Biegeaktoren entlang der Motorwelle angeordnet. Zur Leistungssteigerung werden zwei Biegeaktorpaare verwendet, die den Antriebsring um die Motorwelle bewegen. Alternativ kann auch die mit einem Stirnrad versehene Antriebswelle kreisförmig verschoben werden, so dass das Stirnrad auf der Innenfläche des Antriebsringes abrollt. Für stärkere zylindrische Kappelmotoren sind Stapelaktoren als Aktoren möglich.
Eigenschaften
Piezoelektrisch angetriebene Kappelmotoren weisen folgende funktionale Eigenschaften auf:
- Hohe absolute Positioniergenauigkeit (Bogensekunden)
- Konstantes, drehzahlunabhängiges Motormoment (mehrere Nm)
- Hohe Dynamik (Start/Stopp Zeiten kleiner 0,1 ms)
- Sensorlose Echtzeit-Erfassung von Lastmomenten
- Leistungsloses Positionshalten unter Last im eingeschalteten Zustand
- Großes Haltemoment im ausgeschalteten Zustand (d. h. ohne Energiezufuhr)
- Drehzahlbereich 0 bis einige hundert min−1
- Völlige Spielfreiheit und sehr hohe Drehsteifigkeit (kein Getriebe nötig)
- Einfache Synchronisierbarkeit mehrerer Kappelmotoren
- Geringer Verschleiß aufgrund Abrollbewegung
- Skalierbarkeit bezüglich Drehzahl/Drehmomentcharakteristik (Mikroverzahnung)
- Skalierbarkeit bezüglich Materialsystem (Metall, Kunststoff, Verbundwerkstoffe)
- Magnetfeldunabhängige Funktion (z. B. in Magnetresonanztomographen)
- Keine Erzeugung magnetischer Streufelder
Anwendung
Durch den möglichen open-loop Betrieb werden komplexe Bewegungsabläufe, wie sie in der Robotik auftreten, einfach beherrschbar. Zukünftige Anwendungsgebiete sind Antriebsprobleme, bei denen es weniger auf Drehzahl, sondern mehr auf Drehmoment, Präzision, einfache Ansteuerung und Dynamik ankommt, wie:
- Fensterheber in Kraftfahrzeugen
- Robotik
- Zeigerinstrumente
- Positionierungsaufgaben aller Art
- Einsatz in strahlungsbelasteter Umgebung
Siehe auch
Literatur
- Kappel, B. Gottlieb, T. Schwebel, C. Wallenhauer: PAD – Piezoelectric Actuator Drive, Actuator 2006, 10th Int. Conf. on New Actuators, Bremen, Germany 2006, p. 457 - 460
- J. Rucha, H. Liess, J. Heinzl, A. Kappel, T. Schwebel, B. Gottlieb, C. Wallenhauer, T. Lüth: Applicability of a piezoelectric actuator drive as a sensorless high precision drive, Actuator 2006, 10th Int. Conf. on New Actuators, Bremen, Germany 2006, p. 636 - 639
- A. Kappel, B. Gottlieb, T. Schwebel, C. Wallenhauer, M. Vogl, J. Rucha, T. Lüth: PAD – Ein mikromechatronisches Antriebssystem mit ungewöhnlichen Eigenschaften, VDE Verlag, GMM, Fachbericht 54, 2007, p. 147 – 152
- C. Wallenhauer, B. Gottlieb, A. Kappel, T. Schwebel, J. Rucha, T. Lüth: Accurate Load Detection Based on a New Piezoelectric Drive Principle Employing Phase-Shift Measurement, IEEE Journal of Micromechanical Systems, Vol. 16, No. 2, April 2007, doi:10.1109/JMEMS.2006.889536, p. 344 - 350
- R. Keller, A. Kappel, B. Gottlieb, T. Schwebel, C. Wallenhauer: PAD-Piezoelectric Actuator Drive, new high precision and sensitive actuator system, PCIM Europe 2007, Nuremberg, May 22. - 24., Germany
- A. Kappel, B. Gottlieb, C. Wallenhauer: Piezoelektrischer Stellantrieb (PAD), at – Automatisierungstechnik 56 (2008) 3, doi:10.1524/auto.2008.0693, Oldenbourg Wissenschaftsverlag, p. 128 - 135
- R. Zeichfüßl, B. Gottlieb, C. Wallenhauer, A. Kappel, M. Vogl, T. Kraus, T. Lüth: Synchronously Controlled Piezoelectric Actuator Drives (PAD) as Motors of a Delta-3 Robot, Actuator 2008, 11th Int. Conf. on New Actuators, Bremen, Germany 2008, June 9. - 11., p. 125 - 128
- A. Kappel, B. Gottlieb, C. Wallenhauer, R. Zeichfüßl, M. Vogl, T. Kraus, T. Lüth: PAD - A Scalable Drive Technology, Actuator 2008, 11th Int. Conf. on New Actuators, Bremen, Germany 2008, June 9. - 11., p. 558 - 561
- M. Vogl, T. Kraus, R. Zeichfüßl, C. Wallenhauer, B. Gottlieb, A. Kappel, T. Lüth: Development of a MRI-safe Piezo Actuator Drive (PAD), Actuator 2008, 11th Int. Conf. on New Actuators, Bremen, Germany 2008, June 9. - 11., p. 576 - 579
- M. Vogl, T. Kraus, R. Zeichfüßl, C. Wallenhauer, B. Gottlieb, A. Kappel, T. Lüth: Konstruktion und Messung der Steifigkeiten des hochpräzisen PAD-Delta3 Roboters mit Piezorotationsantrieben, Robotik 2008 Kongress, München, Juni 11. - 12., p. 63 - 66
- T. Kraus, M. Vogl, R. Zeichfüßl, C. Wallenhauer, B. Gottlieb, A. Kappel, T. Lüth: Steuerung für den PAD-Delta3 Roboter auf Basis eines digitalen Signalprozessors, Robotik 2008 Kongress, München, Juni 11. - 12., p. 269 - 271
- C. Wallenhauer, A. Kappel, B. Gottlieb, R. Zeichfüßl: PAD - Neue Antriebstechnologie mit hoher Funktionsdichte für die Robotik, IFM Internationales Forum Mechatronik 2008, September 22. - 23., Stuttgart
- A. Kappel, B. Gottlieb, C. Wallenhauer, R. Zeichfüßl: Neue mikromechatronische PAD Präzisionsstellantriebe - mehr als eine Alternative zu Elektromotoren?, VDE Kongress 2008, München, November 3. - 5.
- M. Vogl, T. Kraus, R. Zeichfüßl, C. Wallenhauer, B. Gottlieb, A. Kappel, T. Lüth: Broaching of Microteeth for a PAD - Piezo Actuator Drive, 9th International Conference of the euspen, San Sebastian, Spain 2009, June 02.-05., p. 503-506
- M. Vogl, T. Kraus, M. Peller, R. Zeichfüßl, C. Wallenhauer, B. Gottlieb, A. Kappel, T. Lüth: PAD - Piezo Actuator Drive for Employment in a Magnet Resonance Imaging Device, Worldcongress 2009, Munich, Germany 2009, Sept. 07.-12., p. 271-273
- R. Zeichfüßl, T. Glaßner, A. Kappel, T. Lüth, M. Vogl, C. Wallenhauer: Erprobung der Lebensdauer eines neuartigen piezoelektrischen Stellantriebs (PAD), SPS/IPC/DRIVES, Nürnberg, Germany 2009, 24.-27. Nov., p. 239-247
Weblinks
- Patentanmeldung DE102006046018A1: Piezomehrschichtaktor zum Antrieb eines elektromechanischen Motors. Angemeldet am 28. September 2006, veröffentlicht am 10. April 2008, Anmelder: Siemens AG, Erfinder: Armin Dietz et al.
Einzelnachweise
- Patentanmeldung DE19952946A1: Elektromechanischer Motor. Angemeldet am 3. November 1999, veröffentlicht am 17. Mai 2001, Anmelder: Siemens AG, Erfinder: Andreas Kappel, Bernhard Gottlieb.