Piezomotor
Piezoelektrische Motoren (kurz Piezomotoren) sind Kleinmotoren, die den piezoelektrischen Effekt zur Erzeugung einer Bewegung nutzen. Piezomotoren können sowohl linear als auch rotatorisch arbeiten. Ihr Stellweg ist bei den meisten Funktionsprinzipien prinzipiell unbegrenzt. In linearen Motoren liegt er konstruktiv bedingt meist bei einigen Zentimetern und ist damit deutlich größer als der Stellweg der in den Motoren eingesetzten piezoelektrischen Festkörperaktoren.
Es gibt eine Vielzahl verschiedener Funktionsprinzipien von Piezomotoren. Bei allen Prinzipien wird die Bewegung durch Gleit- oder Haftreibung zwischen einem feststehenden Teil (Stator) und einem bewegten Teil (Rotor) erzeugt. Viele, aber nicht alle dieser Prinzipien basieren auf einer durch piezoelektrische Festkörperaktoren erzeugten, häufig resonanten Schwingung des Stators. Da die Frequenz dieser Schwingungen zumeist im Ultraschallbereich liegt, werden viele Piezomotoren auch als Ultraschallmotoren bezeichnet.
Vorteile piezoelektrischer Motoren gegenüber elektromagnetischen Motoren sind eine hohe Kraft pro Volumen, eine hohe Haltekraft im ausgeschalteten Zustand, sowie eine sehr gute Dynamik und Miniaturisierbarkeit. In einigen Anwendungen ist es ein großer Vorteil, dass sie vakuumtauglich sind und ohne Magnetfelder arbeiten.[1]
Funktionsprinzipien von Piezomotoren
Einige häufig genutzte Prinzipien sind:
- Wanderwellenmotor
- Stehwellenmotor
- Trägheitsmotor, auch als Stick-Slip-Motor bekannt
- „Inchworm“-Motor
- Schreitmotor
Wanderwellen- und Stehwellenmotor und verwandte Typen werden auch als Schwingungsmotoren bezeichnet, da sie von durch piezoelektrische Festkörperaktoren erzeugten Schwingungen angetrieben werden. Im Gegensatz dazu werden Trägheits-, „Inchworm“- und Schreitmotor als (piezoelektrische) Schrittmotoren bezeichnet, da ihre Bewegung in klar abzugrenzende Schritte unterteilt ist.[2] Insbesondere bei Trägheitsmotoren ist diese Einteilung jedoch nicht in jedem Fall zutreffend, da es mittlerweile auch Trägheitsmotoren gibt, deren Prinzip auf resonanten Schwingungen beruht.[1]
Wanderwellenmotoren
Wanderwellenmotoren sind zum überwiegenden Teil rotatorische Motoren. Sie bestehen aus einem feststehenden Teil, dem Stator, und einem beweglichen Teil, dem Rotor. Im Stator befinden sich mindestens zwei piezoelektrische Wandler, die angelegte Wechselspannung in mechanische Schwingungen umwandeln. Die Wandler werden phasenversetzt angeregt, so entsteht eine Wanderwelle auf dem Stator. Diese versetzt über den Reibkontakt zwischen Stator und Rotor letzteren in Bewegung. Um hohe Schwingungsamplituden und damit Geschwindigkeiten zu erreichen, wird der Stator üblicherweise in Resonanz bei Frequenzen im Ultraschall-Bereich betrieben. Eine Wanderwelle in linearen Wanderwellenmotoren ist deutlich aufwendiger zu erzeugen[2], weshalb lineare Wanderwellenmotoren bisher nicht kommerziell verfügbar sind. Wanderwellenmotoren haben vor allem durch ihren Einsatz in Kameraobjektiven größere Bekanntheit erreicht. Beispiele hierfür finden sich im Artikel „Wanderwellenmotor“.
Stehwellenmotoren
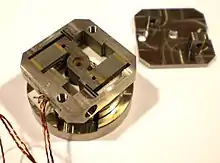
In Stehwellenmotoren wird in einem Stator durch piezoelektrische Festkörperaktoren eine Schwingung in Form einer Stehwelle erzeugt. Die dadurch entstandene, zumeist elliptische, Bewegung einer oder mehrerer Kontaktstellen treibt einen Rotor an. Der Kontakt kann dabei bei großen Schwingungsamplituden zeitweise unterbrochen sein, wodurch es zu Stößen kommt.[2] Stehwellenmotoren können viele verschiedene Formen haben und sowohl rotatorische als auch lineare Bewegungen erzeugen. Das nebenstehende Bild zeigt einen rotatorischen Stehwellenmotor, der von vier Piezoaktoren angetrieben wird.
Trägheitsmotoren
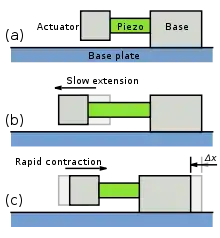
Trägheitsmotoren nutzen die Trägheit des zu bewegenden Objekts, um dieses über einen Reibkontakt zu verschieben. In klassischen Trägheitsmotoren herrscht einer Phase der langsamen Bewegung im Reibkontakt Haftreibung, in einer Phase der schnellen Bewegung werden die Trägheitskrafte so groß, dass die Teile aufeinander gleiten. Dieser Wechsel zwischen Haft- und Gleitreibung hat zur verbreiteten Bezeichnung "Stick-Slip-Motoren" (von engl. "to stick" = haften und "to slip" = gleiten) geführt (vgl. Stick-Slip-Effekt). Es gibt aber auch Trägheitsmotoren, die ohne Haftphasen arbeiten. In diesen Motoren gleiten die Teile auch in den Antriebsphasen aufeinander.[1]
Piezoelektrische Trägheitsmotoren können sehr einfach aufgebaut sein. Im einfachsten Fall bestehen sie wie im nebenstehenden Beispiel aus nur drei Bauteilen. Die zahlreichen Formen von Trägheitsmotoren können u. a. danach unterschieden werden, ob der den Motor antreibende Festkörperaktor feststeht oder sich mit dem Motor bewegt. Die meisten Trägheitsmotoren arbeiten mit niedrigen Frequenzen bis zu wenigen kHz. Einige resonante Trägheitsmotoren arbeiten aber auch im Ultraschallbereich. Trägheitsmotoren werden z. B. zur Probenpositionierung in der Mikroskopie und zur Bildstabilisierung in Digitalkameras eingesetzt.[3][1]
„Inchworm“-Motoren
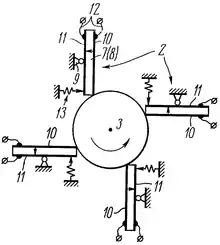
„Inchworm“-Motoren, auch Wurmmotoren genannt, arbeiten nach nebenstehend dargestelltem Prinzip „Klemmen und Schieben“.[4] Das raupenähnliche Fortbewegungsprinzip war namensgebend für den Markennamen „Inchworm“ (engl. für Raupe), der heute allgemein diesen Motortyp beschreibt. Der im nebenstehenden Bild dargestellte Motor besteht (oben wie unten) aus zwei Klemmaktoren und einem Vorschubaktor. Wegen des getakteten Betriebs arbeiten „Inchworm“-Motoren bei niedrigen Frequenzen im hörbaren Bereich. Sie sind auf große Kräfte und Präzision ausgelegt, weniger auf hohe Geschwindigkeit.[4]
Schreitmotoren
Anders als in „Inchworm“-Motoren werden in sogenannten Schreitmotoren das Klemmen und der Vortrieb von denselben und nicht von unterschiedlichen Aktoren übernommen. Im dargestellten Beispiel im nebenstehenden Bild werden hierzu zwei Biegeaktoren in Bimorph-Bauform (jeweils zwei Aktoren plus Zwischenschicht) verwendet. Die Kontaktpunkte an ihren Spitzen würden bei freier Bewegung eine elliptische Bewegung ausführen. Tatsächlich drücken sie aber auf einem Teil dieser Bahn gegen den „Rotor“, das anzutreibende Element, und schieben dieses so in die gewünschte Richtung. Durch die phasenversetzte Bewegung der Aktoren klemmt immer mindestens einer den Rotor, sodass dieser nie freiläuft.
Ultraschallmotor
Ultraschallmotoren unterscheiden sich von anderen piezoelektrischen Motoren in mehrfacher Hinsicht, obwohl beide in der Regel eine Form von piezoelektrischem Material verwenden. Der offensichtlichste Unterschied ist die Nutzung von Resonanz zur Verstärkung der Schwingung des Stators in Kontakt mit dem Rotor in Ultraschallmotoren[5].
Ein besonders drehmomentstarker "Hybridwandler"-Ultraschallmotor verwendet in Umfangsrichtung gepolte und axial gepolte piezoelektrische Elemente, um Axial- und Torsionsschwingungen entlang der Kontaktfläche zu kombinieren, was eine Antriebstechnik darstellt, die irgendwo zwischen der stehenden und der Wanderwellen-Antriebsmethode liegt.[6]
Weblinks
- K. Spanner - Survey of the Various Operating Principles of Ultrasonic Piezomotors — Übersicht verschiedener Typen von Piezomotoren, auch Nicht-Ultraschallmotoren (englisch; PDF-Datei; 1,32 MB)
- J. Twiefel - Experimentelle und modellbasierte Untersuchung von Stehwellenantrieben — Doktorarbeit über Stehwellenmotoren, auf S. 4 bis 10 werden auch andere Motortypen diskutiert (PDF-Datei, 6,28 MB)
- M. Hunstig - Konzeption, Ansteuerung und Eigenschaften schneller piezoelektrischer Trägheitsmotoren — Doktorarbeit über Trägheitsmotoren, auf S. 9 bis 16 werden auch andere Motortypen diskutiert (PDF-Datei; 13,98 MB)
- SteadyShot INSIDE — Body-integrated Image Stabilization System (engl.), archivierte Kopie abgerufen am 23. November 2015 (Memento vom 10. Mai 2012 im Internet Archive) — Animierte Erklärung eines Bildstabilisierungssystems inkl. Beschreibung des verwendeten Trägheitsmotors
Einzelnachweise
- M. Hunstig: Konzeption, Ansteuerung und Eigenschaften schneller piezoelektrischer Trägheitsmotoren. Schriften des Lehrstuhls für Mechatronik und Dynamik, Band 2, Shaker 2014. Zgl. Dissertation, Universität Paderborn, 2014
- Tobias Hemsel: Untersuchung und Weiterentwicklung linearer piezoelektrischer Schwingungsantriebe. HNI-Verlagsschriftenreihe, Band 101, 2001. Zgl. Dissertation, Universität Paderborn, 2001, ISBN 3-935433-10-7
- SteadyShot INSIDE — Body-integrated Image Stabilization System. Sony-Website. (Memento vom 10. Mai 2012 im Internet Archive) Abgerufen am 10. Mai 2012, archiviert
- J. Twiefel - Experimentelle und modellbasierte Untersuchung von Stehwellenantrieben. Berichte aus dem IDS, Band 05/2010. Zgl. Dissertation, Gottfried Wilhelm Leibniz Universität Hannover, 2011
- Ultraschallmotor (USM) - Wo zu verwenden ultraschallmotor | ADUK GmbH ▼. In: ADUK GmbH. 28. Januar 2022, abgerufen am 23. Februar 2022 (deutsch).
- Ultrasonic motors - Where to use them and how to create them | ADUK GmbH ▼. In: ADUK GmbH. 4. Januar 2022, abgerufen am 23. Februar 2022 (britisches Englisch).