Gelenkviereck
Ein Gelenkviereck (englisch: four-bar linkage) ist ein Gelenkvieleck, das aus vier Gliedern (z. B. Stäben) besteht, die durch Gelenke an ihren Eckpunkten miteinander zu einem Viereck verbunden sind. Andere Bezeichnungen sind (geschlossene) Viergelenkkette oder viergliedrige kinematische Kette.[1][2]
Aus einem Gelenkviereck gebildete Getriebe heißen Viergelenkgetriebe.
Das Gelenkviereck kann auch zur mechanischen Darstellung mathematischer Funktionen eingesetzt werden oder von Bewegungszuordnungen, die empirisch aus Messreihen gewonnen wurden.[3]
Ebene Gelenkvielecke, die ausschließlich über Drehgelenke miteinander verbunden sind, sind beweglich, wenn sie
- über höchstens ebenso viele Drehgelenke verbunden sind, wie sie Glieder besitzen und
- keine ihrer Glieder zu einem Dreieck miteinander verbunden sind.
Sie besitzen dann einen Laufgrad (Freiheitsgrad) größer gleich null und sind statisch unterbestimmt. Ein ideales Fachwerk setzt sich demgegenüber aus statisch bestimmten Gelenkketten zusammen.
Das Gelenkviereck ist die kinematische Kette mit der kleinsten Anzahl der Glieder und nur einem angetriebenen Glied, das eine zwangläufige Bewegung ausführt, wenn eines der anderen Glieder ein ortsfestes Gestell ist. Das heißt, wenn ein Glied fixiert ist und eines der anderen Glieder wird um einen seiner Endpunkte gedreht, dann bewegen sich das dritte und das vierte in einer festgelegten Bewegung zwangläufig mit. Ab dem Gelenkfünfeck bedarf es zweier Antriebsbewegungen.
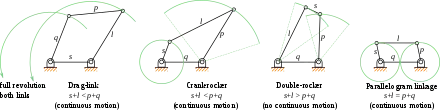
Solche Mechanismen werden als Koppelgetriebe bzw. genauer als Kurbelgetriebe (englisch: crank-rocker linkage) bezeichnet.
Die befestigte (Gestell-)Seite heißt Steg, die beiden ihr benachbarten Seiten bezeichnet man als Arme, die vierte Seite ist die Koppel(stange). Alle mit der Koppel direkt und indirekt fest verbundenen Punkte heißen Koppelpunkte, ihre Bewegungen beschreiben Koppelkurven (englisch: coupler curve).
Um zu ermitteln, ob eines der Glieder eine vollständige Drehung ausführen kann, wendet man die Grashofsche Regel an, die besagt, dass bei einem ebenen Gelenkviereck eine kontinuierliche Relativbewegung zwischen zwei Gliedern nur dann möglich ist, wenn die Summe der Längen von dem kürzesten und dem längsten Glied kleiner ist als die Summe der Längen der beiden anderen Glieder.
Viele Mechanismen im Alltag wie in der Technik können auf Gelenkvierecke zurückgeführt werden.[4][5][6][7][8]
Literatur
Mareike Mink: Überall Gelenkvierecke, in: Geometrie entdecken in technischen Anwendungen; Lernumgebungen für MINT-Unterricht mit Alltagsbezug. ISBN 978-3-658-19413-0
Einzelnachweise
- Kurt Rauh, Leo Hagedorn: Praktische Getriebelehre: Erster Band. Springer-Verlag, 1931, S. 11 (Volltext in der Google-Buchsuche).
- Rudolf Beyer: Kinematische Getriebesynthese: Grundlagen einer quantitativen Getriebelehre ebener Getriebe. Für den Konstrukteur, für die Vorlesung und das Selbststudium.
- Kurt Hain: Gelenkgetriebe-Konstruktion: mit Kleinrechnern HP Serie 40 (HP 41C/CV) und HP Serie 80 (HP-83, HP-85, HP-86, HP-87). Springer-Verlag, 2013, ISBN 978-3-663-14113-6, S. 14 (Google Books [abgerufen am 21. Januar 2019]).
- Hanfried Kerle, Burkhard Corves, Mathias Hüsing: Getriebetechnik: Grundlagen, Entwicklung und Anwendung ungleichmäßig übersetzender Getriebe. Springer-Verlag, 2015, ISBN 978-3-658-10057-5, S. 33–43 (google.de [abgerufen am 17. Januar 2019]).
- Leo Hagedorn, Wolfgang Thonfeld, Adrian Rankers: Konstruktive Getriebelehre. Springer-Verlag, 2013, ISBN 978-3-662-08167-9, S. 15 (google.de [abgerufen am 12. Januar 2019]).
- Mareike MINT: Gelenkvierecke – Elementare Geometrie in alltäglicher Technik erkennen. In: www.mathematik.uni-dortmund.de. Abgerufen am 11. Januar 2019.
- Ahmed A. Shabana: Einführung in die Mehrkörpersimulation. John Wiley & Sons, 2017, ISBN 978-3-527-67809-9, S. 130 (google.de [abgerufen am 12. Januar 2019]).
- Dubbel Taschenbuch für den Maschinenbau. 16., korrigierte und ergänzte Auflage. Springer Berlin Heidelberg, 1987, ISBN 978-3-662-06778-9, S. 22.