Driver Machine Interface
Das Driver Maschine Interface (DMI[1]) dient im Europäischen Zugbeeinflussungssystem European Train Control System (ETCS) als Schnittstelle zwischen dem Triebfahrzeugführer im Führerstand und dem Triebfahrzeug.[2] Im deutschsprachigen Raum wird der Begriff uneinheitlich u. a. als Führerstandsdisplay[3][4], Display[5][6], Bildschirmanzeige[7], Bildschirm[8], Anlage zur Bildschirmeingabe[9], ETCS-Display[10], ETCS-Führerstandsanzeige[10], Führerstandsanzeige[11] oder Schnittstelle Mensch-Maschine[12] übersetzt.

Über das DMI können Triebfahrzeugführer und ETCS-Fahrzeugausrüstung direkt miteinander kommunizieren.[13] Es visualisiert für ihn die aktuell wichtigsten Informationen der Zugfahrt – darunter die Geschwindigkeit, aktuelle Signale der Zugsicherung sowie den technischen Zustand des Triebfahrzeugs – und muss daher im unmittelbaren Sichtbereich des Triebfahrzeugführers angeordnet werden.[14]
Das DMI ist Teil der ETCS-Fahrzeug-Referenzarchitektur.[15] Der Aufbau des DMI richtet sich nach der UIC-Norm 612-0x. Es kann entweder per berührungsempfindlichem Bildschirm oder mit Tastatur bedient werden; die Norm sieht für beide Varianten entsprechende funktionelle Ausführungen vor.[16] Die dargestellten Informationen und die Interaktion zwischen Lokführer und DMI sind Gegenstand des Dokuments ERA_ERTMS_015560, das verbindlicher Bestandteil der aktuellen ETCS-Spezifikation (Baseline 3) ist.[17]
Mensch-Maschine-Schnittstelle
Nach der UIC-Norm 612-0x müssen die Führerräume von Triebfahrzeugen mit vier standardisierten und universell einsetzbaren DMIs ausgestattet sein.[18] Der Aufbau des ETCS-DMI ist pixelgenau definiert.[16] Die Ausschnittsfläche beträgt 310 × 214 mm² bei einer Bildschirmdiagonale von 10,4 Zoll und 640 × 480 Bildpunkten.[16] Modernere DMIs können bis zu 12,4 Zoll Bildschirmdiagonale und mehr Bildpunkte bieten.[18]
Aus einer Vielzahl von Informationen sollen im DMI wesentliche Daten priorisiert und zusammengefasst dargestellt werden. Akustische Signale sollen die Aufmerksamkeit von der Strecke auf das DMI lenken und auf wichtige visuelle Informationen (z. B. bevorstehende Zwangsbremsungen) hinweisen. Die standardisierte Bedienerführung unterstützt die Fokussierung auf besonders wichtige Informationen durch Abdimmen oder Ausblenden weniger wichtiger Informationen.[19] Es war das grundlegende Designziel für das DMI, den Triebfahrzeugführer mit der richtigen Menge an Informationen zu versorgen und ihn weder zu über-, noch zu unterfordern.[19]
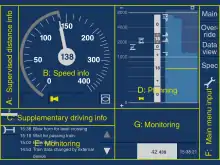
Der Aufbau des Displays gliedert sich in sechs Hauptfelder,[19] von links oben nach rechts unten sind dies (Stand: 2004):
- Die Überwachten Entfernungsinformationen (engl. Supervised Distance Info) werden nur bei einer aktiven Bremskurve angezeigt. Dabei kann es sich um die Darstellung der Zielentfernung, die Zeit bis zu einer Intervention, die Vorhersage der Geschwindigkeit an einer bestimmten Stelle oder die Vorhersage des genauen Ortes, an dem der Zug zum Stillstand kommt, handeln.[19]
- Das Feld zur Geschwindigkeitssteuerung (engl. Speed Info) enthält Informationen zur Bremskurve und Geschwindigkeitsüberwachung. Diese Informationen müssen nur bei Bewegung des Fahrzeugs angezeigt werden, im Stillstand kann es für andere Funktionen verwendet werden, beispielsweise zur Dateneingabe.[19]
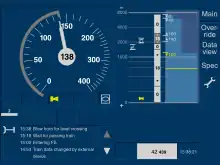
- Im Feld für zusätzliche Fahrinformationen (engl. Supplementary Driving Info) können beispielsweise der ETCS-Level, eine empfohlene Geschwindigkeit, Abweichungen vom Fahrplan oder Informationen zu nationalen Zugbeeinflussungssystemen (Specific Transmission Module, STM) angezeigt werden.[19]
 DMI während einer Fahrt mit dem STM LZB
DMI während einer Fahrt mit dem STM LZB - Das Feld zur Planung künftiger Ereignisse (auch Vorschaubereich[12][20], engl. Planning) enthält eine Vorausschau der für die einzelne Zugfahrt relevanten Streckeninformationen. Darin können beispielsweise das Geschwindigkeitsprofil des Zuges, Ankündigungen von Bahnübergängen oder Bahnhöfen oder Befehle dargestellt werden. Bei Bedarf ermöglicht eine zweite Ebene eine Detaillierung. Damit soll dem Triebfahrzeugführer eine bessere Trennung von sicherheitsrelevanten/unmittelbaren und nicht sicherheitsrelevanten/vorausschauenden Informationen ermöglicht werden. Bei Eintritt in die Bremskurvenüberwachung wird das Feld gedimmt, um die Aufmerksamkeit auf die wichtigsten Informationen zu lenken und damit die Sicherheit des Gesamtsystems zu erhöhen.[19] Die Skala der Vorausschau lässt sich in 6 Stufen von 1 bis 32 km einstellen.[12]
- Die beiden Felder zur Überwachung technischer Systeme (engl. Monitoring) sind unterhalb der beiden vorgenannten Felder angeordnet. Sie können beispielsweise Informationen zu Türsteuerung, Klimaanlage, nationalen Zugbeeinflussungssystemen, Funk oder auch die Uhrzeit enthalten. Durch diese über die ETCS-Kernfunktionalität hinausgehenden Informationen soll eine Darstellung aller für den Triebfahrzeugführer relevanten Informationen erreicht werden. Lediglich für Daten technischer Diagnosen und Details sollten noch separate Anzeigen notwendig sein.[19]
- Das Feld für Triebfahrzeugführer-Eingaben (engl. Driver Input) ermöglicht die Eingabe verschiedener Zug- und Triebfahrzeugführer-Daten.[19]

In das DMI können beispielsweise auch Funktionen für Automatisierten Fahrbetrieb (ATO) und Fahrerassistenzsysteme (DMI) integriert werden.[21][22] Im ATO-Betrieb wird beispielsweise während eines Verkehrshaltes ein Countdown zur vorgesehenen Abfahrtszeit dargestellt.[23]
Darstellung überwachter Geschwindigkeiten
Mittels Odometrie ermittelt ETCS laufend die tatsächliche Geschwindigkeit des Fahrzeugs und vergleicht diese mit dem Minimum der zulässigen Geschwindigkeit des Fahrzeugs sowie der Strecke, die per Eurobalise bzw. per Funk (via RBC, in den ETCS-Leveln 2 und 3) übermittelt wird. Dies ist die Grundlage für die Weg- und Geschwindigkeitsüberwachung des Fahrzeugs und Aufgabe der ETCS-Fahrzeugeinrichtung (engl. Onboard Unit, OBU). Das DMI dient der Darstellung der aktuellen Werte.
In der ETCS-Betriebsart Vollüberwachung (engl. Full Supervision, FS) wird zwischen verschiedenen Überwachungszuständen unterschieden.
Sollgeschwindigkeit
Überwachung der Sollgeschwindigkeit (engl. Ceiling Speed Monitoring, CSM)[12], wenn die Einhaltung einer konstanten Höchstgeschwindigkeit überwacht wird und kein Geschwindigkeitswechsel auf eine niedrigere Geschwindigkeit ansteht:
- Normaler Zustand, wenn die tatsächliche Geschwindigkeit des Zuges unterhalb der Überwachungsgrenze liegt und keine Geschwindigkeitsabsenkung erwartet wird. Der Tachometerkreis (engl. Hook[24]) gibt dann die Sollgeschwindigkeit dunkelgrau an.[12]
- Eine Geschwindigkeitsüberschreitung wird angezeigt, wenn die tatsächliche Geschwindigkeit etwa 2 bis 3 km/h über der Überwachungsgrenze liegt.[12] Auf der kreisförmigen Geschwindigkeitsanzeige wird der Bereich zwischen zulässiger Geschwindigkeit und der Eingriffsgeschwindigkeit (bei der ETCS ein Bremskommando ausgibt) in oranger Farbe dargestellt, zusätzlich wird die Tachnonadel orange gefärbt und einmalig ein akustisches Signal ausgegeben.[12] Die farbliche Warnung erlischt wieder, sobald die tatsächliche Geschwindigkeit des Zuges wieder die Überwachungsgrenze unterschreitet.[12]
- Der Warnstatus wird aktiviert, sobald die tatsächliche Geschwindigkeit des Zuges die Überwachungsgrenze überschreitet.[12] umgekehrt wird er wieder deaktiviert, wenn die tatsächliche Geschwindigkeit des Zuges wieder unterhalb der zulässigen Überwachungsgeschwindigkeit liegt.[12] Die optische Darstellung entspricht jener der Geschwindigkeitsüberschreitung, es ertönt dabei dauerhaft ein akustisches Warnsignal.[12]
- Ein Bremseingriff erfolgt, sobald die tatsächliche Geschwindigkeit des Zuges den Wert der Eingriffsgeschwindigkeit (engl. First Line of Intervention) überschreitet.[12] In der kreisförmigen Geschwindigkeitsanzeige wird der Bereich zwischen zulässiger und tatsächlicher Geschwindigkeit rot dargestellt, die Tachonadel wird rot gefärbt und unterhalb der Levelanzeige erscheint ein Symbol für den Bremseingriff.[12] Die Anzeige des Bremseingriffs erlischt, sobald ETCS kein Bremskommando mehr ausgibt.[12]
 Tacho bei Fahrt auf/unterhalb der Sollgeschwindigkeit, ohne aktive Bremskurve
Tacho bei Fahrt auf/unterhalb der Sollgeschwindigkeit, ohne aktive Bremskurve Tacho bei geringfügiger Überschreitung der zulässigen Geschwindigkeit (164 statt zulässiger 160 km/h)
Tacho bei geringfügiger Überschreitung der zulässigen Geschwindigkeit (164 statt zulässiger 160 km/h) Tacho bei erheblicher Überschreitung der zulässigen Geschwindigkeit (167 statt zulässiger 160 km/h)
Tacho bei erheblicher Überschreitung der zulässigen Geschwindigkeit (167 statt zulässiger 160 km/h) Tacho bei deutlicher Überschreitung der zulässigen Geschwindigkeit (174 statt zulässiger 160 km/h) mit laufendem Bremseingriff (Symbol unten links)
Tacho bei deutlicher Überschreitung der zulässigen Geschwindigkeit (174 statt zulässiger 160 km/h) mit laufendem Bremseingriff (Symbol unten links)
Zielgeschwindigkeit
Die Zielgeschwindigkeitsüberwachung (engl. Target Speed Monitoring, TSM) beginnt mit Ankündigung einer neuen, niedrigeren zulässigen Geschwindigkeit.[12] Dazu werden ETCS-Bremskurven verwendet.
- Die Ankündigungsüberwachung (engl. Pre-Indication Monitoring, PIM) beginnt zehn Sekunden vor Erreichen der Sollbremskurve und endet an dem Punkt, an dem die Sollbremskurve erreicht wird.[12] Der Bereich der bevorstehenden Geschwindigkeitsabsenkung sowie die Tachonadel werden in weißer Farbe dargestellt.[12] Neben einer einmaligen akustischen Information wird die Zielentfernung als Entfernung, bis zu der die angekündigte niedrigere Geschwindigkeit einzuhalten ist, links des Tachos als Balkendiagramm mit Meterwert dargestellt.[12] Die Ankündigungsüberwachung ist mit SRS 3.6.0 entfallen.
- Geschwindigkeitsüberschreitungen, Warnungen und Bremseingriffe erfolgen entsprechend der Überwachung der Sollgeschwindigkeit.[12]
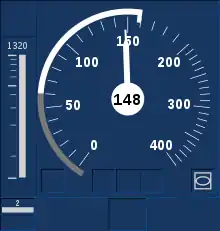 Ankündigungsüberwachung von momentan noch zulässigen 160 km/h auf 60 km/h binnen 1320 m
Ankündigungsüberwachung von momentan noch zulässigen 160 km/h auf 60 km/h binnen 1320 m Bremsung innerhalb der Bremskurve (bei zulässigen 143 km/h beträgt die tatsächliche Geschwindigkeit 128 km/h.)
Bremsung innerhalb der Bremskurve (bei zulässigen 143 km/h beträgt die tatsächliche Geschwindigkeit 128 km/h.) Geringfügige Überschreitung der zulässigen Geschwindigkeit während einer Bremsung. (Bei zulässigen 143 km/h beträgt die tatsächliche Geschwindigkeit 146 km/h.)
Geringfügige Überschreitung der zulässigen Geschwindigkeit während einer Bremsung. (Bei zulässigen 143 km/h beträgt die tatsächliche Geschwindigkeit 146 km/h.) Erhebliche Überschreitung der zulässigen Geschwindigkeit während einer Bremsung. (Bei zulässigen 128 km/h beträgt die tatsächliche Geschwindigkeit 135 km/h.)
Erhebliche Überschreitung der zulässigen Geschwindigkeit während einer Bremsung. (Bei zulässigen 128 km/h beträgt die tatsächliche Geschwindigkeit 135 km/h.)
ETCS kann mehrere Bremszielpunkte verwalten. Dem Triebfahrzeugführer wird dabei nur der relevanteste Zielpunkt („Most Relevant Displayed Target“, MRDT) angezeigt.[25][26]
Release Speed
Die Release-Speed-Überwachung (engl. Release Speed Monitoring, RSM) dient dem Ausgleich von Ungenauigkeiten der Odometrie und ermöglicht, mit niedrigen Geschwindigkeiten bis zu einer ETCS-Halt-Tafel vorzuziehen bzw. ein „Fahrt“ zeigendes Signal zu überfahren. Die Release Speed wird mit hellgrauer Farbe auf dem äußeren Rand der kreisförmigen Geschwindigkeitsanzeige dargestellt. Kurz vor einem ETCS-Halt kann die Release Speed dabei größer als die zulässige Geschwindigkeit sein.[12]
- Darstellung der Annäherung an ein Signal mit 15 km/h Release Speed im Führerraumdisplay (DMI)
 190 m vor dem Ende der Zielgeschwindigkeitsüberwachung (TSM) und der Sollkurve bei 48 km/h wird die Release Speed (15 km/h) noch nicht in Anspruch genommen…
190 m vor dem Ende der Zielgeschwindigkeitsüberwachung (TSM) und der Sollkurve bei 48 km/h wird die Release Speed (15 km/h) noch nicht in Anspruch genommen… … ebenso 50 m vor dem Ende der TSM (Sollkurve bei 30 km/h).
… ebenso 50 m vor dem Ende der TSM (Sollkurve bei 30 km/h). 20 m vor dem Ende der TSM hat die durch Sollbremskurve überwachte Geschwindigkeit (8 km/h) die Release Speed unterschritten. Durch die Release Speed von 15 km/h wird die Annäherung mit 12 km/h toliert.
20 m vor dem Ende der TSM hat die durch Sollbremskurve überwachte Geschwindigkeit (8 km/h) die Release Speed unterschritten. Durch die Release Speed von 15 km/h wird die Annäherung mit 12 km/h toliert. Nach Ablauf des TSM, auf dem letzten Metern vor dem Signal, erfolgt die langsame Annäherung an das Signal mittels Release Speed (mit 8 km/h).
Nach Ablauf des TSM, auf dem letzten Metern vor dem Signal, erfolgt die langsame Annäherung an das Signal mittels Release Speed (mit 8 km/h).
Weitere Betriebsarten
Beim Fahren auf Sicht (ETCS-Betriebsart On Sight) sind die Anzeigen auf ein Minimum reduziert, um den Triebfahrzeugführer nicht unnötig von der Streckenbeobachtung abzulenken und eine klare Unterscheidung zum Fahren in Vollüberwachung zu schaffen.[12] Die zulässige Geschwindigkeit wird nur durch einen Haken am Rand der Tachoscheibe angezeigt, auf die kreisförmige Geschwindigkeitsanzeige wird verzichtet.[12] Mit einer Umschalttaste kann eine zusätzliche Anzeige der Zielentfernung und Release Speed (jeweils nur digital) aktiviert werden.[12]
In der Betriebsart Staff Responsible (SR) wird nur die tatsächliche Geschwindigkeit angezeigt. Die zulässige Geschwindigkeit, die Zielentfernung und die Zielgeschwindigkeit werden nur auf Anfrage des Triebfahrzeugführers angezeigt.[2]
In der Betriebsart Limited Supervision (LS) werden nur die tatsächliche Geschwindigkeit, die (als Nationaler Wert definierte) zulässige Geschwindigkeit sowie einige wenige Überwachungsgrößen angezeigt.[2] Auf die Bremsankündigung wird verzichtet, um – wie auch bei der Punktförmigen Zugbeeinflussung – die Unabhängigkeit der Übertragungskanäle der Signalinformation sicherzustellen. Erst unmittelbar vor dem Bremseingriff wegen Geschwindigkeitsüberschreitung (Warning) erfolgt eine visuelle und akustische Information.[27] Eine Besonderheit der Betriebsart ist die Anzeige der niedrigsten überwachten Geschwindigkeit der Fahrterlaubnis (engl. Lowest Speed supervised within Movement Authority, LSSMA), die per Balisentelegramm ein-, aus- oder verzögert eingeschaltet werden kann. Sie wird ggf. links oben im DMI als Klartext angezeigt und ersetzt den in anderen Betriebsarten angezeigten Tachometerkreis (Hook).[24]
Im Automatisierten Fahrbetrieb (Betriebsart AD) werden Warntöne unterdrückt.[28]
Anforderungen
Datenein- und -ausgabe für Lokpersonal


Die Anzeige- und Bedienelemente von ETCS sind programmgesteuert flexibel verwendbar.[19] Im Gegensatz zu früheren Zugbeeinflussungssystemen erfordert ETCS dabei eine Anzeige.[14] Eingaben können über berührungsempfindliche Bildschirme (Touchkey) oder Tasten (Softkeys) vorgenommen werden.[20]
EVC-Kopplung
Zur Kommunikation zwischen dem ETCS-Fahrzeugrechner (European Vital Computer, EVC) und dem DMI kommen RS485, Profibus, Ethernet oder MVB zum Einsatz (Stand: 2011). Oftmals liefert der EVC-Hersteller auch das DMI; vereinzelt wird es aber auch von einem anderen Lieferanten oder dem Fahrzeughersteller geliefert.[29] Oftmals werden Sicherheitsprotokolle zur sicheren Datenübertragung verwendet.[30]
Ein- und Ausgaben am DMI werden in den ETCS-Fahrtdatenschreibern (engl. Juridical Registration Unit, JRU) gespeichert.[31] Teilweise werden verschlüsselte Verbindungen zwischen EVC und DMI gefordert, auch zum Schutz vor Cyberangriffen. Für derartige Verschlüsselungskomponenten gibt es keine einheitlichen Anforderungen.[32]
Um 2017 wurde mit dem Subset-121 eine FFFIS-Schnittstellendefinition zwischen DMI und EVC vorgelegt.[33] Diese ist nicht Teil der ETCS-Spezifikation, ihre Anwendung nicht verbindlich.[34]
Hochverfügbarkeit
Der Ausfall des ETCS-DMI führt zum Stillstand des Zuges.[16] Eine Abhilfe kann im Einbau zweier Displays mit gleicher Funktion liegen, beispielsweise durch Aufteilung des 10,4-Zoll-Displays in zwei hochkant nebeneinander angeordnete 8-Zoll-Displays. Fällt eines der beiden Displays in einer solchen Lösung aus, kann das verbliebene Display die notwendigen sicherheitsrelevanten Informationen (z. B. Geschwindigkeit) anzeigen, während auf die Darstellung nicht sicherheitsrelevanter Inhalte verzichtet wird.[16] Die Umschaltung vom Zwei-Display-Betrieb auf eines der beiden Displays kann dabei beispielsweise über einen Drehschalter erfolgen.[20]
Werden Führerräume nach UIC-Spezifikation 612-0x mit vier DMIs ausgerüstet, kann der Ausfall eines DMIs grundsätzlich durch andere Displays kompensiert werden.[18]
Höhere Redundanzanforderungen an das DMI können zu höheren Hardwarekosten führen.[32]
Erweiterte Temperatur- und Umgebungstoleranz
Nach UIC 601 müssen DMIs u. a. einen erweiterten Temperaturbereich unterstützen sowie frontseitigen IP-65-Schutz und eine Schutzlackierung der Elektronikkomponenten bieten. Bei vollständig geschlossenen Gehäusen ist eine lüfterlose Ausführung erforderlich, wodurch die Abwärme gering gehalten werden muss.[18]
Es können bestimmte Bereiche des Displays gezielt überwacht und dabei Ist- und Soll-Zustand miteinander verglichen werden.[16]
Echtzeit
Im laufenden Betrieb muss nach Eingaben des Triebfahrzeugführers binnen zwei Sekunden ein neues Fenster dargestellt werden.[35]
Nach Aktivierung des Führerraums muss binnen drei Sekunden der Dialog zur Eingabe der Triebfahrzeugführer-Nummer ("Driver ID") angezeigt werden.[36] Zwischen Aktivierung des Führerraums und Aktivierung des Rangiermodus (Mode SH) dürfen, ohne Berücksichtigung der Eingabe von Zugnummer und Anforderung von Shunting (Rangiermodus), höchstens 15 Sekunden vergehen.[37]
Geschichte
In der ersten ETCS-Projektbeschreibung von 1991 war die Schaffung von harmonisierten Schnittstellen zwischen der ETCS-Onboard-Unit und weiteren Umsystemen der Fahrzeugausrüstung, wie beispielsweise dem DMI, vorgesehen.[38]
Im Zuge der Interoperabilität im Schienenverkehr (TSI) war nach einer Vorgabe der Europäischen Kommission eine Lösung für ein europäisch einheitliches DMI zu finden, die problemlos von den Fahrzeugbetreibern genutzt und von der Industrie gefertigt werden kann. Neben ETCS sollte im DMI auch EIRENE (GSM-R) abgebildet werden.[19]
Die Entwicklung eines solchen europaweit einheitlichen DMIs erfolgte unter der Vorgabe höchster Benutzerergonomie erfolgte zunächst durch die Arbeitsgruppe A200 im Auftrag der UIC.[19][30] Sie begann 1991 mit einer Orientierung bei verschiedenen Bahnen. 1992 folgten Befragungen und Workshops mit europäischen Experten im Führen von Triebfahrzeugen. Das Design wurde in den Jahren 1992 und 1993 ausgearbeitet und parallel wurden Test und Simulation entwickelt.[19] Beteiligt waren etwa 35 Experten von 13 Bahnen. Dabei entstanden sechs experimentelle Designs.[39] 1993 folgten Simulatortests mit 130 Triebfahrzeugführern aus verschiedenen europäischen Ländern. 1994 bis 1996 erfolgten Design und Spezifikation sowie weitere Untersuchungen zur Dateneingabe (Softkey, Touchscreen, Dialogstruktur). Insgesamt hatten 240 Triebfahrzeugführer Gelegenheit, ihre Ansichten und Kommentare zum DMI einzubringen.[19] Die erste Beschreibung eines einheitlichen Bedien- und Anzeigegeräts, die in die erste Systemanforderungsspezifikation (SRS A200) einging, gilt als ein wesentlicher durch ETCS erreichter Fortschritt.[29][40]
Mitte der 1990er Jahre sah die ETCS-Fahrzeugarchitektur neben dem European Vital Computer (EVC, für sicherheitsrelevante Systeme) auch einen nicht sicheren Management Computer (MC) vor. Ihm oblagen Funktionen u. a. die Steuerung der damals als MMI bezeichneten Bediengeräte, die damit nicht in den Sicherheitsnachweis des EVC mit einzubeziehen waren.[41] Um 2000 oblag die Steuerung dagegen dem EVC.[42]
1998 wurde eine mit Spezialisten europäischer Bahnen und der Industrie besetzte CENELEC-Arbeitsgruppe beauftragt, diesen Entwurf in eine Interfacespezifikation umzusetzen.[19] Auf der Grundlage von funktionaler (FRS) und Programmanforderungsspezifikation (SRS) entwickelte ab 1998 die sogenannte Arbeitsgruppe 9D eine DMI-Beschreibung für ERTMS, ETCS und EIRENE. Durch eine einheitliche Philosophie und Darstellung im ETCS-DMI sollte auch das Risiko für menschliche Fehler vermindert werden. Während die Eingabe und Darstellung von ETCS-Informationen fest definiert wurde, blieben konkrete technische Geräte oder Lösungen (z. B. Touchscreen oder Softkey) offen, um Betreibern Flexibilität zu geben.[19] Verschiedene Entwürfe wurden vorgestellt und revidiert.[19]
Im Rahmen des DMI-Designs war beispielsweise über das richtige Maß der zu vermittelnden Informationen und deren Abstraktionsgrad (z. B. „0 km/h“ oder „rot“) zu entscheiden. Es war sicherzustellen, dass das Interface für Anfänger und Experten gleichermaßen geeignet und für veränderte Rahmenbedingungen (z. B. Verlagerung von streckenseitigen und von Signalinformationen in den Führerraum) nutzbar ist. Ferner war das System im Hinblick auf die menschliche Wahrnehmung zu gestalten, beispielsweise eine angemessene akustische Begleitung bei Veränderungen in der visuellen Darstellung.[19]
Die EVC-DMI-Schnittstelle war nicht auf FFFIS-Ebene definiert. Der EVC-Hersteller definierte die DMI-Anforderungen, einschließlich der SIL-Anforderungen selbst.[29] Da die Kommunikation zwischen DMI und ETCS-Bordcomputer nicht standardisiert war, bildeten sich im Laufe Zeit zwei Varianten heraus:
- Das DMI diente als Terminal für das EVC, d. h. die Anzeige wird vom EVC gesteuert.
- Das DMI diente als Standalone-Einheit und trifft auf der Grundlage vom EVC empfangener Informationen eigene Entscheidungen.[29]
Die CENELEC gab bis September[30] 2005 die DMI-Spezifikationen heraus. Obgleich diese Versionen nicht bindend waren, hielten sich die meisten ETCS-Lieferanten daran. Das Design der Oberfläche berücksichtigte dabei die verschiedenen Anforderungen von Eisenbahninfrastruktur- und -verkehrsunternehmen.[29] Im Fokus stand die Bedienung per Touchscreen. Insbesondere zur Bedienung per Softkey bestand erheblicher Interpretationsspielraum.[30]
Durch die Darstellung von ETCS- und GSM-R-Informationen in einem gemeinsamen DMI sollte die Fahrzeugausrüstung vereinfacht und Kosten gespart werden.[38] Dieser Ansatz wurde jedoch nicht zur Umsetzung übernommen (Stand: 2009).[39]
In ETCS Baseline 2 war die Anzeige nicht Gegenstand der ETCS-Spezifikation (SRS, FFFS), eine CENELEC-konforme Anzeige jedoch einer der Grundgedanken.[11] Es gab gleichwohl erhebliche Unterschiede zwischen den Bedienoberflächen verschiedener Hersteller.[43] Die DMIs erfüllten dabei Sicherheitsanforderungen zwischen den Sicherheitsanforderungsstufen SIL 0 und SIL 2.[29]
2005 ab die ERTMS Users Group den Entwurf einer „Operational DMI information“ heraus, in der – aufbauend auf den CENELEC-Entwurf von 2005 – jene Teile des DMI beschrieben wurden, die verbindlich beschrieben werden sollten.[30]
2007 übernahm die Europäische Eisenbahnagentur (engl. European Railway Agency, ERA) die Fortschreibung der DMI-Spezifikation. Eine erste mit ETCS-Subset 026 konsistente Version erschien im Dezember 2008. Die Spezifikation beschreibt zwei Varianten – Touchscreen und Softkeys –, die auf funktionaler Ebene identisch sind.[29] Unter anderem wurden Touchscreen- und Softkey-Bedienung nunmehr gleichwertig detailliert beschrieben.[30] Mit Einführung der ETCS Baseline 3 trat erstmals eine verbindliche Spezifikation des ETCS-DMI in Kraft. Damit sollte die Darstellung aller ETCS-bezogenen Informationen europaweit einheitlich gestaltet werden.[12]
DMIs nach Baseline 3 müssen nunmehr SIL-2-sicher sein. Laut einem Pressebericht hätte die ERA auf Druck aus Deutschland diese höheren Anforderungen festgesetzt. Damit müssen bei einer Aufrüstung von Baseline 2 auf Baseline 3 Bildschirme vorzeitig ausgetauscht werden, was zu erheblichen Kosten führt. Das Schweizer Bundesamt für Verkehr sieht darin keinen erkennbaren Nutzen. Fahrzeuge, die nur in der Schweiz verkehren, bräuchten die neuen Sicherheitsanforderungen nicht zu erfüllen.[44]
Im Rahmen der 2012 begonnenen ETCS-Ausrüstung von über 240 Fahrzeugen („zweite Welle“) in der Schweiz wurden, ergänzend zu den Anforderungen von ETCS, zusätzlich noch Elemente der nationalen Zugbeeinflussung, der zentralen und einmaligen Eingabe von Betriebs- und Zugdaten, die Ermittlung diesbezüglicher Vorschlagswerte sowie die Anzeige maschinentechnischer Leuchtmelder umgesetzt. Damit sollte insbesondere die Betriebs- und Zugdateneingabe vor Beginn der Zugfahrt vereinfacht und beschleunigt werden.[45]
Bei der Inbetriebnahme des Leman Express wurden Ende 2019/Anfang 2020 mehrere DMI-Probleme beobachtet. Sensoren zur Einstellung der Helligkeit anhand der Umgebung reagierten bei tiefstehender Sonne falsch, weshalb die Sensoren kurzfristig abgeklebt wurden.[46] Die häufigste Störungsursache im Betrieb waren zunächst Dunkelschaltungen des DMI aus nicht bekannten Gründen, die Schnellbremsungen auslösten.[47][46]
2021 erschienen die für das DMI maßgebliche, in drei Teile gegliederte Norm (CLC/TS 50459) neu.[48]
Sonstiges
Für den zur Expo 2000 entwickelten Funkfahrbetrieb (FFB) wurde ein ETCS-DMI verwendet.[49] Nach anderen Quellen entsprach das FFB-DMI „[b]is auf wenige, unbedeutende Einzelheiten dem ETCS-DMI“.[50]
In den Niederlanden werden Fahrempfehlungen auf Tablets der Triebfahrzeugführer in ETCS-DMI-ähnlicher Form dargestellt.[51]
Bei der Integration von ETCS in Bestandsfahrzeuge (Retrofit) muss mitunter das Führerpult umgestaltet werden, um Platz für das ETCS-DMI zu schaffen.[32]
Wird ein nationales Zugbeeinflussungssystem in ETCS als Specific Transmission Module (STM) integriert, wird dieses in der Regel auch in das DMI mit integriert. Alternativ können nationale Zugbeeinflussungssysteme separat integriert werden.[52] Dabei verbleiben deren Bedieneinrichtungen im Fahrzeug und werden nicht in das ETCS-DMI integriert.[53] Ein Vorteil eines einheitlichen DMIs für ETCS und alle weiteren Class-B-Systeme liegt auch in der Vermeidung von Triebfahrzeugführer-Ausbildungskosten.[54] Beim Start des Fahrzeugs ist ETCS als Zugbeeinflussungssystem aktiv, die Auswahl eines nationalen Systems erfordert eine separate Bedienhandlung durch den Triebfahrzeugführer.[11]
Für Tests der ETCS-Fahrzeugausrüstung schreibt die Testspezifikation (Subset 094) ein Touch- bzw. Softkey-Display als Schnittstelle vor. Eine direkte Stimulation der Schnittstelle zwischen DMI und EVC ist nicht zulässig. Die am DMI vorzunehmenden Eingaben können beispielsweise über einen Roboter automatisiert vorgenommen werden.[43]
Literatur
- CENELEC (Hrsg.): CLC/TS 50459-1:2021. Teil 1: Ergonomische Prinzipien für die Darstellung von ERTMS/ETCS/GSM-R Informationen (= Bahnwendungen - Telekommunikationstechnik, Signaltechnik und Datenverarbeitungssysteme - Europäisches Leitsystem für den Schienenverkehr - Mensch-Maschine Schnittstelle -. Band 1). 2021 (Europäische Norm).
Weblinks
- ETCS-Spezifikation, insbesondere DMI-Spezifikation (Dokument ERA_ERTMS_015560) in aktueller Version 3.6.0 sowie Vorversion 3.4.0 und Version 2.3.0 auf dem Internetauftritt der Europäischen Eisenbahnagentur (ERA)
- ETCS-Handbuch für Triebfahrzeugführer im Word- und HTML-Format auf der Homepage der Europäischen Eisenbahnagentur.
- Driving under ETCS L1 control. Splitscreen-Video einer Fahrt unter ETCS Level 1 mit eingeblendetem DMI.
- ETCS für Hobbyisten: Fahren und Bremsen und Betriebsarten OS, SR und Override. Videos (anhand eines Simulators) mit Beschreibung der Abläufe im DMI im Regel- und Störfallbetrieb.
- ETCS level 2 on Siemens Desiro. Night train ride to Jerusalem. 73-minütiges Video (englisch) einer Fahrt von Tel Aviv nach Jerusalem, mit eingeblendetem DMI und ausführlichen Erklärungen
Einzelnachweise
- ETCS-Spezifikation, Subset 023, Version 3.3.0, Abschnitt 5
- Rainer Eschlbeck: Das European-Train-Control-System. In: Deine Bahn. Nr. 6, Juni 2010, ISSN 0948-7263, S. 20–24.
- Michael Fußy: VDE 8: ETCS Level 2 ohne Signale – Erstemalige Anwendung in Deutschland. In: ZEVrail. Band 138, Nr. 9, September 2014, ISSN 1618-8330, S. 374–380.
- Marc Joseph, Michael Tobler: Freie Fahrt in der Schweiz für ETCS Level 2 mit Siemens Trainguard 200 und „Schweiz Paket“. In: Eisenbahn-Revue International. 2015, ISSN 1421-2811, S. 492–494.
- Christoph Gralla: Kosteneinspareffekte bei der ETCS-Implementierung auf der Fahrzeug- wie auch auf der Infrastrukturseite. In: Eisenbahntechnische Rundschau. Nr. 7, Juli 2013, ISSN 0013-2845, S. 30–36.
- Erstmals kommerzielle Höchstgeschwindigkeit von 200 km/h in der Schweiz. In: Schweizer Eisenbahn-Revue. Nr. 10, Oktober 2007, ISSN 1022-7113, S. 508.
- Gotthard-Verspätungen: Erkenntnisse und Massnahmen der SBB. In: Eisenbahn-Revue International. Nr. 6, Juni 2016, ISSN 1421-2811, S. 274–277.
- Peter Gerber: Mit ETCS wird auch der Signalwald erweitert. In: Schweizer Eisenbahn-Revue. Nr. 2, Februar 2015, ISSN 1022-7113, S. 94–96.
- Stefan Rameder: ETCS bei den ÖBB: Aufbruch in eine neue Ära der Zugsicherung. In: Eisenbahn-Revue International. Nr. 5, Mai 2010, ISSN 1421-2811, S. 222–225.
- Ines Hamberger: ETCS Betrieb der Westbahn zwischen Wien und Salzburg. In: ZEVrail. Band 140, Nr. 8, August 2016, ISSN 1618-8330, S. 292–297.
- Uwe Dräger: ETCS und der Übergang zu den nationalen Zugsicherungssystemen der DB AG. In: Signal + Draht. Band 96, Nr. 11, 2004, ISSN 0037-4997, S. 6–15.
- Rainer Eschlbeck: ETCS aus Sicht des Triebfahrzeugführers. In: Deine Bahn. Nr. 6, Juni 2012, ISSN 0948-7263, S. 36–40.
- ETCS-Spezifikation, Subset 023, Version 3.3.0, Abschnitt 4
- Werner Geier: Der Führerraum von modernen elektrischen Lokomotiven. In: Schweizer Eisenbahn-Revue. Nr. 12, Dezember 2002, ISSN 1022-7113, S. 550–554.
- ETCS-Spezifikation, Subset 091, Version 3.3.0, Abschnitt 4.3.
- Dana Schiffer: Redundant und sicher – Anforderungen an ein modernes DMI im ETCS. In: Eisenbahntechnische Rundschau. Band 2016, Nr. 9, September 2016, ISSN 0013-2845, S. 70–72.
- ETCS-Spezifikation, Dokument ERA_ERTMS_015560, Version 3.6.0
- Gunther Gräbner: Driver Machine Interface mit AMD Embedded G-Series APUs. In: Eisenbahntechnische Rundschau. Nr. 12, Dezember 2018, ISSN 0013-2845, S. 62 f.
- Ulla Metzger, Jochen Vorderegger: „Human Factors“ und Ergonomie im ERTMS/ETCS - Einheitliche Anzeige und Bedienung. In: Signal + Draht. Band 96, Nr. 12, 2004, S. 35–40.
- Die Zukunft von ETCS in Deutschland. In: Gewerkschaft Deutscher Lokomotivführer (Hrsg.): Voraus. Nr. 9 / 10 / 11 / 12, 2018, ISSN 1438-0099, S. 27 / 24 f. / 24 f. / 24–26 (erschien in vier Teilen in den Heften 9/2018 bis 12/2018).
- Paul Booth: ETCS and ATO through the Thameslink core. In: Railway Gazette International. Nr. 9, September 2015, ISSN 0373-5346, S. 33–37.
- Manuel Villalba: Pioneering ATO over ETCS Level 2. In: Railway Gazette International. Band 172, Nr. 9, 2016, ISSN 0373-5346, S. 107–109.
- Markus Pelz, Thomas Griem: Energieeffiziente Automatisierungslösungen für den Bahnverkehr. In: ZEVrail. Band 139, Nr. 8, August 2015, ISSN 1618-8330, S. 284–290.
- Niels Neuberg: Der Einsatz von ETCS Level 1 Limited Supervision bei der Deutschen Bahn AG. In: Signal + Draht. Band 106, Nr. 12, Dezember 2014, ISSN 0037-4997, S. 12–18.
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.10.3.9
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.10.4.2
- Thorsten Büker: ETCS Level 1 LS (ESG) unter dem Aspekt der Leistungsfähigkeit. In: Eisenbahntechnische Rundschau. Nr. 11, November 2017, ISSN 0013-2845, S. 24–31.
- ERA, UNISIG, EEIG ERTMS USERS GROUP (Hrsg.): ATO over ETCS. System Requirements Specification. 4. Mai 2018, S. 23 (Abschnitt 7.1.3.5) (Datei SUBSET-125-010.docx in ZIP-Archiv [abgerufen am 25. April 2019]).
- Olaf Mense: The on board Interfaces. In: Peter Stanley (Hrsg.): ETCS for engineers. DVV Media Group, Hamburg 2011, ISBN 978-3-7771-0416-4, S. 193–198.
- Patrick Deutsch: ETCS Driver Machine Interface DMI. In: Compendium on ERTMS. Eurailpress, Hamburg 2009, ISBN 978-3-7771-0396-9, S. 113–115.
- Bernd Gonska, Oliver Röwer, Lennart Asbach: Rekonstruktion betrieblicher Szenarien aus JRU-Aufzeichnungen für Labortests. In: Signal + Draht. Band 107, Nr. 4, April 2017, ISSN 0037-4997, S. 21–26.
- Roland Stadlbauer: Effizientes Ausrüsten von Schienenfahrzeugen mit ETCS am Beispiel Slowakei. In: Signal + Draht. Band 108, Nr. 11, November 2016, S. 29–37.
- CONTRIBUTING TO SHIFT2RAIL'S NEXT GENERATION OF HIGH CAPABLE AND SAFE TCMS AND BRAKES. (PDF) D3.1 – Drive-by-Data Requirement Specification. 20. Juni 2017, S. 34, abgerufen am 28. Dezember 2019 (englisch).
- ERTMS certification. In: era.europa.eu. Europäische Eisenbahnagentur, abgerufen am 28. Dezember 2019 (englisch): „Subsets 119, 120 and 121 are NOT mandatory at the moment.“
- ETCS-Spezifikation, Subset 041, Version 3.2.0, Abschnitt 5.2.1.0.
- ETCS-Spezifikation, Subset 041, Version 3.2.0, Abschnitt 5.2.1.11.
- ETCS-Spezifikation, Subset 041, Version 3.2.0, Abschnitt 5.2.1.12.
- Peter Winter: Conclusion and outlook. In: Compendium on ERTMS. Eurailpress, Hamburg 2009, ISBN 978-3-7771-0396-9, S. 235–242.
- Peter Winter: ETCS project history. In: Compendium on ERTMS. Eurailpress, Hamburg 2009, ISBN 978-3-7771-0396-9, S. 69–80.
- Jens Hartmann: Migration von ETCS im Netz der Deutschen Bahn. In: Deine Bahn. Nr. 3, März 2008, ISSN 0948-7263, S. 33–38.
- Bernhard Ptok: ETCS – Kern des „Europäischen Eisenbahn Verkehrsmanagement Systems“. In: Der Eisenbahningenieur. Nr. 3, März 1996, ISSN 0013-2810, S. 56 ff.
- Hartmut Thies, Andreas Wik: Das FSS-Pilotprojekt der SBB - weltweit erste Applikation von ETCS Level 2. In: Signal + Draht. Band 92, Nr. 9, September 2000, ISSN 0037-4997, S. 16–24.
- Lennart Asbach, Hardi Hungar, Karsten Lemmer, Michael Meyer zu Hörste: Formalisierung von Tests für hochautomatisierte Testausführung. In: Signal + Draht. Band 106, Nr. 9, 2014, ISSN 0037-4997, S. 26–34.
- ETCS in der Schweiz: Aktueller Stand und Herausforderungen. In: Schweizer Eisenbahn-Revue. Nr. 6, Juni 2018, ISSN 1022-7113, S. 300.
- Andreas Indermühle, Peter Knechtsberger: ETCS-Ausrüstung von über 240 Fahrzeugen im Zug der Schweizer ETCS-Strategieumsetzung. In: Signal + Draht. Band 106, Nr. 5, 2014, ISSN 0037-4997, S. 13–17.
- Léman-Express: Vollbetrieb mit grossen Anlaufproblemen. In: Eisenbahn-Revue International. Nr. 3, März 2020, ISSN 1421-2811, S. 134.
- Flirt LEX im Endspurt zur Eröffnung der S-Bahn Genf. In: Eisenbahn-Revue International. Nr. 1, Januar 2020, ISSN 1421-2811, S. 18.
- Normen – Bahnanwendungen. In: Elektrische Bahnen. Nr. 11, November 2021, ISSN 0013-5437, S. 432–436.
- Florian Kollmannsberger: Telematik als wichtiger Baustein im Gesamtsystem Bahn. In: Eisenbahntechnische Rundschau. Band 49, Nr. 11, November 2000, ISSN 0013-2845, S. 734–739.
- Werner Geier: Das neue Mensch-Maschine-Interface der Lokomotive BR 185. In: Schweizer Eisenbahn-Revue. Nr. 9, September 1999, ISSN 1022-7113, S. 366–374.
- Murray Hughes: Every second counts s. In: Railway Gazette International. Band 175, Nr. 1, 2019, ISSN 0373-5346, S. 36–40.
- Klaus Mindel, Oliver Scheck: Wirtschaftliche Ausrüstung von Triebfahrzeugen mit ETCS. In: ZEVrail (= Tagungsband SFT Graz). Band 135, 2011, ISBN 978-3-85125-175-3, S. 32–39.
- Gerwin Smulders, Lieuwe Zigterman: Certification of ERTMS for European locomotives: theory and practice. In: Signal + Draht. Band 104, Nr. 3, März 2012, ISSN 0037-4997, S. 32–36.
- Aki Härkönen, Jörgen Öhrström: STM: The nordic experiences in a joint development project. In: Signal + Draht. Band 99, Nr. 12, 2007, ISSN 0037-4997, S. 34–37.