Direkte Selbstregelung
Unter dem Begriff direkte Selbstregelung (DSR)[1] versteht man in der Stromrichtertechnik, speziell in der elektrischen Antriebstechnik, ein Regelungsverfahren zur elektronischen Ansteuerung von Drehfeldmaschinen, speziell Asynchronmaschinen.
Die direkte Selbstregelung stellt eine Form der direkten Regelung dar, weil sie die Größen Maschinenfluss und Drehmoment direkt und getrennt voneinander regelt – im Gegensatz zur feldorientierten Regelung, bei der die Motordrehzahl stets im Mittelpunkt der Regelung steht.
Motivation
Wie bei jedem Stromrichter, wird der Verlauf der Ausgangsgrößen durch schnelles Schalten von Halbleiterschaltern aus einer konstanten Zwischenkreisgröße (Strom oder Spannung) gebildet. Speziell bei Hochleistungsstromrichtern mit Zwischenkreisspannungen von mehreren Kilovolt ist die maximal zulässige Schaltfrequenz der Halbleiterschalter jedoch stark begrenzt. Weiteres sind Glättungskondensatoren für hohe Spannungen groß und teuer, weshalb für gewöhnlich nur kleine Kapazitäten eingesetzt werden. Die Zwischenkreisspannung kann nicht mehr als konstant betrachtet werden.
Dies hat zur Folge, dass sich herkömmliche Modulationsverfahren wie beispielsweise die Raumzeigermodulation für derartige Stromrichter nicht optimal einsetzen lassen.
Funktionsweise

Für die elektronische Ansteuerung von Drehfeldmaschinen werden grundsätzlich drei Halbbrücken benötigt, um in jeder Phase der Maschine einen kontinuierlichen Strom einprägen zu können. Demnach ergeben sich, wie bei der Raumzeigermodulation, sechs Schalterstellungen welche je einen aktiven Spannungsraumzeiger darstellen und zwei passive Nullspannungsraumzeiger.
Das Grundprinzip der direkten Selbstregelung besteht nun darin, mithilfe der sechs aktiven Spannungsraumzeiger den Statorfluss der Asynchronmaschinen auf einer definierten Bahnkurve zu führen. Durch Aufschalten eines Spannungsraumzeiger an die Maschine stellt sich ein dementsprechender Statorflussraumzeiger ein. Wird nun der Spannungsraumzeiger kontinuierlich chronologisch gewechselt (führen auf einer sechseckigen Bahnkurve), dreht sich der Statorflussraumzeiger folglich dementsprechend nach. Somit wird der Magnetisierungszustand der Asynchronmaschinen festgelegt. Das Drehmoment der Maschine wird durch die Geschwindigkeit, mit der sich der Statorflussraumzeiger auf dieser Bahnkurve bewegt, festgelegt, welche wiederum vom Betrag des Spannungsraumzeigers abhängt. Mit den verbliebenen zwei Nullspannungsraumzeigern kann durch zyklischen Umschalten auf einen dieser Raumzeiger der Betrag des resultierenden Raumzeigers bestimmt werden.
Bei herkömmlichen Modulationsarten werden nun diese Spannungsraumzeiger zyklisch nach einer vorgegebenen Zeit an die Maschine geschaltet. Bei der direkten Selbstregelung wird das Weiterschalten der Spannungsraumzeiger nun jedoch vom Statorflussraumzeiger bestimmt. Überschreitet die Komponente der jeweiligen β-Achse (abhängig von der aktuellen Schalterstellung) des Statorflussraumzeigers einen bestimmten Betrag, wird zum nächsten Spannungsraumzeiger gewechselt. Dadurch gibt also der Fluss der Maschine das Weiterschalten der Spannungsraumzeiger vor. Ein Hystereseregler (Flussregler) vergleicht hierfür den Statorfluss mit dem vorgegeben gewünschten Fluss. Es existiert also kein Modulator, der eine vorgegebene (Schalt-)Frequenz realisiert, wie dies z. B. bei der Vektorregelung der Fall ist.
Parallel dazu vergleicht ein weiterer Hystereseregler (Drehmomentregler) das aktuelle Drehmoment der Maschine mit einem gewünschten vorgegebenen Wert, und schaltet bei Bedarf anstelle des vom Flussregler gewählten Spannungsraumzeiger einen der beiden Nullspannungsraumzeiger an die Maschine.
Da die Halbbrücken somit nur geschaltet werden müssen, sobald eine Abweichung auftritt, kann die Schaltfrequenz, im Gegensatz zu herkömmlichen Modulationsverfahren, wo permanent geschaltet wird, deutlich reduziert werden. Die Schaltfrequenz hängt somit maßgebend von der Maschine selbst ab. Zusätzlich kann ein weiterer Regler eingesetzt werden, der die Hysterese des Drehmomentreglers in Abhängigkeit von der aktuellen Schaltfrequenz ändert. Somit wird bei vorgegebener maximaler Schaltfrequenz stets eine optimale Regelung des Drehmoments erreicht.
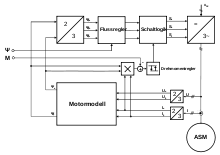
Maßgebend für die Funktion der direkten Selbstregelung ist somit die Kenntnis über den aktuellen Maschinenfluss sowie über den Augenblickswert des Drehmoments. Um diese Parameter zu erhalten, ist ein geeignetes mathematisches Modell der Maschine erforderlich, über welches der Signalprozessor mithilfe von gemessenen Parametern, wie Statorstrom und Statorspannung, die gewünschten Größen errechnet.
Anwendung
Anwendung findet die direkte Selbstregelung hauptsächlich bei elektrischen Triebfahrzeugen, da hier neben der hohen Spannung auch erhebliche Spannungsschwankungen aufgrund von kurzzeitigen Verbindungsunterbrechungen zwischen Stromabnehmer und Oberleitung auftreten können. Da die direkte Selbstregelung äußerst robust gegenüber schwankender Zwischenkreisspannung ist, bietet sich dieses Regelverfahren besonders an.
Literatur
- Dierk Schröder: Elektrische Antriebe – Regelung von Antriebssystemen 3. Auflage, Springer Berlin Heidelberg, Berlin, Heidelberg, 2009, ISBN 978-3-540-89612-8
- Felix Jenni, Dieter Wüest: Steuerverfahren für selbstgeführte Stromrichter 1. Auflage, B.G. Teubner, Stuttgart, 1995, ISBN 3-519-06176-7
Siehe auch
Einzelnachweise
- Depenbrock, M.: Direkte Selbstregelung (DSR) für hochdynamische Drehfeldantriebe mit Stromrichterspeisung. etz Archiv 1985, H. 7, S. 211–218