Raumzeigermodulation
Unter der Bezeichnung Raumzeigermodulation (englisch space vector modulation, (SVM, SVPWM), oder auch englisch space vector control) versteht man in der Leistungselektronik ein Verfahren zur Steuerung von rotierenden elektrischen Maschinen auf Basis der Pulsweitenmodulation.
Basierend auf dieser Modulationsart ist es möglich, ein Mehrphasendrehstromsystem auf elektronischem Wege nachzubilden, wie es für den Betrieb von Drehstrommaschinen benötigt wird. Durch die Raumzeigerdarstellung genügen zwei Größen, der Winkel des Raumzeigers und dessen Betrag oder Real- und Imaginärteil, um die Flussdichteverteilung in der Maschine vorzugeben.
Funktionsweise
Voraussetzung
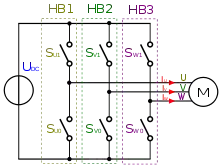
Soll ein Dreiphasensystem nachgebildet werden, so benötigt man für jede der drei Phasen eine Halbbrücke (HB1, HB2, HB3). Dadurch können die Ausgangsspannung der Phase (U, V, W) sowohl auf das positive als auch auf das negative Zwischenkreispotenzial (UDC) gelegt werden. Wie der Schaltung bereits zu entnehmen ist, darf bei jeder Halbbrücke immer nur ein Schalter geschlossen sein, da sonst die Zwischenkreisspannung kurzgeschlossen wird. Für die weiteren Betrachtungen wird angenommen, dass bei jeder Halbbrücke jeweils ein Schalter geschlossen ist. Somit liegt zu jedem Zeitpunkt in jeder Phase ein bestimmtes Potenzial vor. Daraus folgt, dass jede Halbbrücke zwei Zustände annehmen kann. Im ersten Zustand ist der obere Schalter (Zustand "1") und im zweiten Zustand der untere Schalter (Zustand "0") geschlossen.
Grundspannungsraumzeiger
Jede Halbbrücke kann zwei verschiedene Schalterstellungen annehmen. Da drei Halbbrücken für ein Dreiphasendrehstromsystem notwendig sind, ergeben sich dadurch mögliche Schalterstellungen und somit 8 Schaltzustände. Es ergibt sich bei jeder Schalterstellung eine andere Spannungskonstellation zwischen den Phasen und damit auch ein anderer Spannungsraumzeiger. Die zwei Schalterstellungen, bei denen entweder alle drei oberen oder alle drei unteren Schalter geschlossen sind, stellen eine Ausnahme dar. Bei diesen Schalterstellungen werden alle drei Phasen kurzgeschlossen. Somit ist zwischen den Phasen keine Spannung messbar. Diese beiden Spannungsvektoren werden als Nullspannungsraumzeiger bezeichnet. Daraus lassen sich 6 aktive und zwei passive Spannungsraumzeiger darstellen. In folgender Tabelle sind jeweils die verketteten Ausgangsspannungen der 8 Schalterstellungen, die auftreten können, abgebildet.

| Grundspannungsraumzeiger | Halbbrücke 1 SU1/SU0 |
Halbbrücke 2 SV1/SV0 |
Halbbrücke 3 SW1/SW0 |
UUV | UVW | UWU |
|---|---|---|---|---|---|---|
| U0 | 0 | 0 | 0 | 0V | 0V | 0V |
| U1 | 1 | 0 | 0 | +UDC | 0V | -UDC |
| U2 | 1 | 1 | 0 | 0V | +UDC | -UDC |
| U3 | 0 | 1 | 0 | -UDC | +UDC | 0V |
| U4 | 0 | 1 | 1 | -UDC | 0V | +UDC |
| U5 | 0 | 0 | 1 | 0V | -UDC | +UDC |
| U6 | 1 | 0 | 1 | +UDC | -UDC | 0V |
| U7 | 1 | 1 | 1 | 0V | 0V | 0V |
Modulation
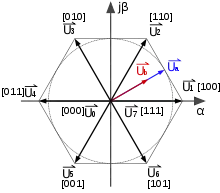
Jeder Spannungsraumzeiger erzeugt ferner in einer Drehstrommaschine eine bestimmte Ausrichtung der Flussdichteverteilung. Um eine Drehstrommaschine nun kontinuierlich (sinusförmig) kommutieren zu können, reichen die 6 aktiven Grundspannungsraumzeiger nicht aus, da Spannungsraumzeiger mit beliebigen Winkeln und Beträgen auf die Maschine geschaltet werden müssen.
Um dies zu erreichen, wird das Grundprinzip der Pulsweitenmodulation angewandt. Möchte man beispielsweise einen Spannungsraumzeiger (Ua) ausgeben, der exakt den halben Winkel des Spannungsraumzeigers U1 und U2 hat, kann dies dadurch realisiert werden, indem der Spannungsraumzeiger U1 abwechselnd mit dem Spannungsraumzeiger U2 ausgegeben wird. Die Dauer, die jeder Spannungsraumzeiger angelegt wird, hängt von der Schaltfrequenz der Modulation ab. Ausschlaggebend für den resultierenden Spannungsraumzeiger ist ausschließlich das Verhältnis der beiden Zeiten. In dem angeführten Beispiel müssen die beiden Zeiten also exakt gleich lange gewählt werden, um den gewünschten Spannungsraumzeiger zu erhalten. Aufgrund der Tiefpasswirkung der Statorwicklungen ergibt sich in der Maschine ein gemittelter Strom und somit der gewünschte Raumzeiger, die gewünschte Ausrichtung der magnetischen Flussdichte.
Die Steuerlogik muss also vorerst prüfen, in welchem der 6 Sektoren der gewünschte Spannungsraumzeiger liegt und die beiden betroffenen Grundspannungsraumzeiger abwechselnd ausgeben. Das Verhältnis der Zeiten, die jeder der beiden Spannungsraumzeiger anliegen muss, ergibt sich aus dem Relativwinkel des gewünschten Spannungsraumzeigers im Bezug zu den Winkeln der betroffenen Grundspannungsraumzeiger.
Bisher wurde beschrieben, wie beliebige Spannungsraumzeiger mit jeweils dem maximalen Betrag ausgegeben werden können. Für die Kommutierung einer Drehfeldmaschine ist es jedoch unerlässlich auch die Amplitude der Ausgangsspannung, also den Betrag des Spannungsraumzeigers, beliebig wählen zu können. Um dies zu realisieren, werden die beiden Nullspannungsraumzeiger benötigt. Möchte man nun beispielsweise den Spannungsraumzeiger Ub ausgeben, muss das Verhältnis der Ausgabezeiten der Spannungsraumzeiger U1 und U2, wie im vorherigen Beispiel, exakt gleich sein. Um den Betrag des resultierenden Spannungsraumzeigers nun reduzieren zu können, wird eine zusätzliche Zeit eingeführt, in welcher ein Nullspannungsraumzeiger ausgegeben wird. Der Betrag des resultierenden Spannungsraumzeigers hängt also vom Verhältnis der Einschaltzeit der aktiven Spannungsraumzeiger und der Einschaltzeit des Nullspannungsraumzeigers ab.
Für die Ausgabe beliebiger Spannungsraumzeiger wird also jede Schaltperiode in drei Zeitspannen unterteilt. In zwei dieser Zeitspannen werden die beiden aktiven Spannungsraumzeiger und in der dritten Zeitspanne ein passiver Spannungsraumzeiger ausgegeben. Die drei beteiligten Spannungsraumzeiger (und somit Schalterstellungen) werden also pulsweitenmoduliert.
Optimierung und Übermodulation
Für das Ausgeben beliebiger Spannungsraumzeiger ist also immer ein Nullspannungsraumzeiger nötig. Da der Maschinenstrom in der Statorwicklung einer Drehfeldmaschine umso glatter ist, je höher die Schaltfrequenz gewählt wird, bietet es sich an, die Zeit, die der Nullspannungsraumzeiger ausgegeben werden muss, zu halbieren. Damit wird erreicht, dass pro Schaltperiode mehrere Schaltvorgänge getätigt werden und somit die Frequenz erhöht wird. Es wird also zu Beginn jeder Schaltperiode die erste Hälfte des Nullspannungsraumzeigers, anschließend der erste aktive Spannungsraumzeiger, die zweite Hälfte des Nullspannungsraumzeigers und zuletzt der zweite aktive Spannungsraumzeiger ausgegeben.
Um die Schaltverluste zu minimieren, kann die Steuerlogik so ausgelegt werden, dass sie den jeweils günstigeren der beiden Nullspannungsraumzeiger ausgibt. Der günstigere Nullspannungsraumzeiger ist jener, für welchen bei der jeweiligen Schalterstellung am wenigsten Schalter umgeschaltet werden müssen.
Damit die verkettete Ausgangsspannung bei Rotation des Spannungsraumzeigers sinusförmig bleibt, darf sich jeder Spannungsraumzeiger nur auf dem im Raumzeigerdiagramm eingezeichneten Kreis bewegen. Für spezielle Anwendungen (kurzzeitig höheres Drehmoment) wird die Ausgangsspannung übermoduliert. Der Spannungsraumzeiger wird in diesem Fall nicht mehr auf einer kreisförmigen Bahn bewegt, sondern – im Extremfall – entlang des im Raumzeigerdiagramm eingezeichneten Sechsecks. Hierbei ist jedoch zu beachten, dass die resultierenden Ausgangsspannungen nicht mehr sinusförmig, sondern mit Oberschwingungen überlagert sind. Dadurch entstehen in einer Drehfeldmaschine höhere Verluste.
Praxis
Umsetzung
Realisiert wird die Raumzeigermodulation für gewöhnlich mit Mikrocontrollern oder digitalen Signalprozessoren. Die technische Umsetzung kann je nach verwendetem Prozessortyp in Software oder direkt in Hardware geschehen. Spezielle Controller haben bereits in der Hardware eine dementsprechende Schaltlogik, welche die Ausgabe der benötigten Spannungsraumzeiger übernimmt. Der Anwender muss hierbei lediglich den gewünschten Spannungsraumzeiger einem Register übergeben und der Hardwareteil des Controllers sorgt für die korrekte Modulation, um den gewünschten Spannungsraumzeiger zu erhalten.
Anwendung
Anwendung findet die Raumzeigermodulation bei Frequenzumrichtern für Drehfeldmaschinen, und zum Teil bei Stromrichtern für bürstenlose Gleichstrommotoren (speziell PMSM), welche einem Frequenzumrichter sehr ähnlich sind. Speziell bei Stromrichtern, die Drehfeldmaschinen mithilfe der feldorientierten Regelung kommutieren, spielt die Raumzeigermodulation eine wichtige Rolle, da hier bereits die Regelung auf Basis der Raumzeigerdarstellung durchgeführt wird.
Eine weitere Anwendung sind spezielle Dreiphasengleichrichter wie der Vienna-Gleichrichter, wo diese Technik zur Reduktion von Oberschwingungen eingesetzt wird.
Literatur
- Dierk Schröder: Elektrische Antriebe - Grundlagen. 1. Auflage. Springer, Berlin, Heidelberg 2009, ISBN 978-3-642-02989-9.
- Dierk Schröder: Elektrische Antriebe - Regelung von Antriebssystemen. 3. Auflage. Springer, Berlin, Heidelberg 2009, ISBN 978-3-540-89612-8.