D’Alembertsches Prinzip
Das d’Alembertsche Prinzip (nach Jean-Baptiste le Rond d’Alembert) der klassischen Mechanik erlaubt die Aufstellung der Bewegungsgleichungen eines mechanischen Systems mit Zwangsbedingungen. Das Prinzip beruht auf dem Satz, dass die Zwangskräfte bzw. -momente in einem mechanischen System keine virtuelle Arbeit leisten.[1][2][3]
Der Name „d’Alembertsches Prinzip“ wird von manchen Autoren für das Dynamische Gleichgewicht zwischen äußerer Kraft und d’Alembertscher Trägheitskraft verwendet,[4] während andere Autoren dies mit heftigen Worten als eine unzulässige Verkürzung ablehnen.[5]
Vorüberlegungen
Die Bewegungsgleichung für einen Massepunkt wird in einem Inertialsystem formuliert. Sie lautet nach dem zweiten newtonschen Gesetz:

Darin sind die Masse, die Absolutbeschleunigung und die äußere Kraft. Diese Grundgleichung der Mechanik kann auf die Form:




gebracht werden. Der Term wird als Kraft aufgefasst und als d'Alembertsche Trägheitskraft bezeichnet.



Das dynamische Problem ist auf ein Gleichgewichtsproblem der Statik zurückgeführt. Man bezeichnet die Beziehung deshalb auch als dynamisches Gleichgewicht. Ein Problem der Dynamik kann somit auch mit Methoden der Statik behandelt werden, wenn Trägheitskräfte berücksichtigt werden.[6] Beim d'Alembertschen Prinzip wird im Folgenden das Prinzip der virtuellen Arbeit ausgenutzt, das in der Statik zur Berechnung unbekannter Lagerkräfte eingesetzt werden kann.
Einführung
Bei einem System von N Massepunkten, welches Zwangsbedingungen unterliegt, lautet die Bewegungsgleichung für die Masse i:
- .

Dabei ist die resultierende äußere Kraft auf den Massepunkt i. Sie ist die Summe aus eingeprägter Kraft und Zwangskraft :




Eingesetzt in die Newtonsche Bewegungsgleichung:

Die Zwangskraft berechnet sich somit zu

Man bildet das Skalarprodukt der Zwangskräfte mit den virtuellen Verschiebungen[Anmerkung 1] . Wenn nach dem Prinzip der virtuellen Arbeit die Zwangskräfte insgesamt keine virtuelle Arbeit verrichten, verschwindet die Summe der Skalarprodukte von Zwangskräften und virtuellen Verschiebungen:


Man erhält das d’Alembertsche Prinzip (in der Formulierung von Lagrange):[1][7][8]

In der Gleichung treten die Zwangskräfte nicht mehr auf – nur die eingeprägten Kräfte. Die Zwangsbedingungen verstecken sich noch in den virtuellen Verschiebungen, denn es sind nur solche erlaubt, die mit den Zwangsbedingungen vereinbar sind.
Um daraus Bewegungsgleichungen zu gewinnen, geht man bei (holonomen) Zwangsbedingungen zu unabhängigen Koordinaten (Freiheitsgraden) über und drückt Lage, Geschwindigkeit, Beschleunigung und virtuelle Verschiebungen der N Massen durch diese neuen Lagekoordinaten („generalisierte Koordinaten“) aus:




Da sich die neuen Koordinaten unabhängig variieren lassen, ergeben sich Differentialgleichungen zweiter Ordnung, die sich nach auflösen lassen. Die konkrete Vorgehensweise zur Aufstellung der Bewegungsgleichungen ist dem nächsten Abschnitt zu entnehmen.


Für holonome Zwangsbedingungen und konservative Kräfte (die sich aus einer Potentialfunktion ableiten lassen) ist das D’Alembert-Prinzip dann äquivalent zu den Lagrangegleichungen erster Art.
Gelegentlich wird schon die eingangs wiedergegebene einfache Umstellung der newtonschen Bewegungsgleichung als das d’Alembertsche Prinzip bezeichnet. Das übersieht aber wesentliche Folgerungen wie die Elimination von Zwangskräften, die keine virtuelle Arbeit leisten und kommt in den Worten von Georg Hamel „fast einer Beleidigung von d’Alembert gleich“.[9] Es ist zudem zu beachten, dass das verwendete Prinzip der virtuellen Arbeit nicht aus den Newtonschen Axiomen folgt, sondern ein eigenes Grundpostulat darstellt.
Erweiterung auf Mehrkörpersysteme
Im allgemeinen Fall von Mehrkörpersystemen wird berücksichtigt, dass auch die virtuelle Arbeit der Zwangsmomente auf den virtuellen Verdrehungen verschwindet. Zur Berechnung der Zwangsmomente wird die Eulersche Gleichung verwendet.

- mit
- Trägheitstensor des Körpers i
- Winkelbeschleunigung des Körpers i
- Winkelgeschwindigkeit des Körpers i
- eingeprägtes Moment auf den Körper i
- virtuelle Verdrehung des Körpers i.





Bei N Körpern und k Bindungen ergeben sich Freiheitsgrade.

Die virtuellen Verschiebungen bzw. Verdrehungen erhält man aus den partiellen Ableitungen der translatorischen bzw. rotatorischen Lagekoordinaten nach den verallgemeinerten Koordinaten:


Die Beschleunigungen lassen sich in einen Teil, der nur von den zweiten Ableitungen der verallgemeinerten Koordinaten abhängt, und einen Restterm zerlegen:
- und
- .


Damit lässt sich das Differentialgleichungssystem zweiter Ordnung in Matrixform darstellen.

Dabei sind:
- die f × f Massenmatrix
- der Vektor der verallgemeinerten Kräfte
- der Vektor der verallgemeinerten Momente



Die Elemente der Massenmatrix berechnen sich zu:

Für die Komponenten verallgemeinerten Kräfte bzw. Momente ergibt sich:


Die Berechnung der Massenmatrix sowie der verallgemeinerten Kräfte und Momente kann numerisch im Rechner durchgeführt werden. Das Differentialgleichungssystem kann ebenfalls numerisch mit gängigen Programmen gelöst werden. Die Behandlung großer Mehrkörpersysteme mit kinematischen Bindungen wird so erst möglich.
Beispiel aus der Punktmechanik: das Fadenpendel

Beim ebenen Fadenpendel mit der Masse wird der Winkel , mit dem der Faden aus der Ruheposition ausgelenkt ist, als Freiheitsgrad gewählt. Die konstante Fadenlänge stellt eine holonome Zwangsbedingung dar. Position, Geschwindigkeit und Beschleunigung der Masse können daher in Abhängigkeit dieses Winkels ausgedrückt werden:




Die virtuelle Verschiebung ergibt sich zu:

Als eingeprägte Kraft wirkt die Gewichtskraft:

Die Bewegungsgleichung ergibt sich aus der Bedingung, dass die virtuelle Arbeit der Zwangskräfte verschwindet.

Durch Auswertung der Skalarprodukte erhält man schließlich:

Masse und Fadenlänge lassen sich kürzen, so dass man die bekannte Differentialgleichung:

erhält.
Die Vorgehensweise erscheint bei diesem einfachen Beispiel sehr umständlich. Da aber nur Skalarprodukte ausgewertet werden müssen, kann dies bei großen Systemen automatisiert werden und numerisch im Rechner durchgeführt werden. Dies erleichtert die Aufstellung von Bewegungsgleichungen wesentlich.
Beispiel aus der Mechanik starrer Körper: der Drallsatz
In älteren Lehrbüchern zur Klassischen und Technischen Mechanik findet man oft eine elegante wie kurze Herleitung des kinetischen Momentensatzes (oder Drallsatz für starre Körper oder auch ‚Grundgleichung der Drehbewegung‘ genannt) aus dem d'Alembertschen Prinzip.[10]
Wenn die Drehachse fest bleibt und somit keine Reaktionen an der Achse auftreten, so wirkt auf einen starren ausgedehnten Körper das Drehmoment der Größe

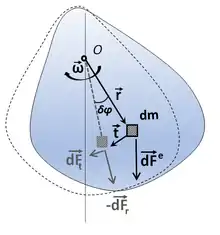
Hierbei ist die Winkelbeschleunigung des starren Körpers durch die Kraftwirkung und das Massenträgheitsmoment des Körpers und der zur Rotationsachse (Winkelgeschwindigkeit) senkrechte Anteil von (siehe auch nebenstehende Abbildung). Da wir zur weiteren Vereinfachung nur die x-y-Ebene des Körpers betrachten und den Ursprung O in die Drehachse legen, fällt hierbei mit zusammen (d. h. ).






Herleitung aus dem d’Alembertschen Prinzip
Man greife zunächst ein beliebiges Massenelement dm des Körpers heraus, auf das die externe Kraft einwirke und die Rotation um die Achse verursacht. Bei jeder Kreisbewegung treten nun an diesem Körperelement radiale und tangentiale Massenbeschleunigungen auf:

- .

In der Lagrangeschen Fassung betrachtet man nur die Zwangskraft, die den starren Körper auf der Kreisbahn hält und die infolge der Massenreaktion ‚verloren‘ geht. Das ist der in radialer Richtung nach außen reagierende Kraftanteil

Die Zwangskraft verrichtet keine virtuelle Arbeit: . Sie steht senkrecht zu der mit den Zwangsbedingungen verträglichen virtuellen Verschiebung: .


Äquivalent dazu bildet man also den Ausdruck
- .

entspricht hierbei der tangential einwirkenden und ‚real ersichtlichen‘ Drehbeschleunigung, die auch den Namen Eulerkraft erhalten hat: . Dabei ist der Einheitsvektor in tangentialer Richtung. Es ist dieser Kraftanteil der eingeprägten Kraft , der nach dem d’Alembertschen Prinzip gegenüber der Drehbeschleunigung ‚verloren‘ geht und somit keine Arbeit verrichten soll. Als Gleichung folgt daraus, aufintegriert für alle (infinitesimal kleinen) Massenelemente des starren Körpers:



- .

Wegen der rein geometrischen Beziehungen und und wegen folgt für die Beträge der Vektoren:



- .

Hier erkennt man nun die d‘Alembertsche Fassung des Prinzips, wie es auch ursprünglich von seinen geistigen Urhebern Jakob Bernoulli, Jean d’Alembert und Leonhard Euler verstanden wurde: Sämtliche inneren Drehmomente sollen sich bei der Drehung des starren Körper im Gleichgewicht halten. Es folgt

- .

Und da beliebig ist, folgt die Grundgleichung der Drehbewegung .


Literatur
- Herbert Goldstein, Charles P. Poole, John L. Safko: Klassische Mechanik. VCH. 3. Auflage, Weinheim 2006.
- Friedhelm Kuypers: Klassische Mechanik. VCH, 5. Auflage 1997, ISBN 3-527-29269-1.
- Georg Hamel: Theoretische Mechanik. 2. Auflage. Springer, Heidelberg, Berlin, New York 1967.
- Werner Schiehlen: Technische Dynamik. Teubner Studienbücher, Stuttgart, 1986.
- Craig Fraser: D’Alembert’s Principle: The Original Formulation and Application in Jean D'Alembert's Traité de Dynamique (1743). Teil 1,2, Centaurus, Band 28, 1985, S. 31–61, 145–159.
- István Szabó: Einführung in die Technische Mechanik. 5. Auflage. Berlin, Göttingen, Heidelberg 1961.
Anmerkungen
- Infinitesimale Verschiebungen heißen virtuell, wenn sie mit den Zwangsbedingungen verträglich sind. Außerdem sollen sie unmittelbar (oder instantan, zu einer festen Zeit) erfolgen.
- Das Minuszeichen deutet an, dass diese Massenreaktion gleichbedeutend mit der Zentrifugalkraft ist. Es ist zugleich der algebraische Ausdruck für den Kraftverlust an der starren Bindung.
Einzelnachweise
- Jürgen Dankert, Helga Dankert: Technische Mechanik: Statik, Festigkeitslehre, Kinematik/Kinetik. 7. Auflage. Springer Vieweg, 2013, ISBN 978-3-8348-2235-2 (eingeschränkte Vorschau in der Google-Buchsuche).
- Klaus-Peter Schnelle: Simulationsmodelle für die Fahrdynamik von Personenkraftwagen unter Berücksichtigung der nichtlinearen Fahrwerkskinematik. VDI-Verlag, Düsseldorf 1990, ISBN 3-18-144612-2. (Fortschrittsberichte VDI Nr. 146), S. 73.
- Skript TU Berlin, PDF 120 kB (Memento vom 5. März 2016 im Internet Archive)
- Hans J. Paus: Physik in Experimenten und Beispielen. Hanser 2007, S. 34.
- Istvan Szabo: Geschichte der Mechanischen Prinzipien. Springer-Verlag, 1987, S. 40.
- Cornelius Lanczos: The Variational Principles of Mechanics. Courier Dover Publications, New York 1986, ISBN 0-486-65067-7, S. 88–110 (eingeschränkte Vorschau in der Google-Buchsuche): „The addition of the force of inertia I to the acting force F changes the problem of motion to problem of equilibrium.“
- István Szabó: Geschichte der mechanischen Prinzipien und ihrer wichtigsten Anwendungen. Springer DE, 1987, ISBN 978-3-7643-1735-5, S. 39– (Abgerufen am 8. Februar 2013).
- Kurt Magnus, H. H. Müller-Slany: Grundlagen der Technischen Mechanik. 7. Auflage. Vieweg+Teubner, 2005, ISBN 3-8351-0007-6, S. 258 (eingeschränkte Vorschau in der Google-Buchsuche).
- Hamel Theoretische Mechanik, Springer 1967, S. 220.
- István Szabó, Einführung in die Technische Mechanik. 5. Auflage, 1961, Kap. V, §28, S. 397 f. (Szabó folgt der Lagrangeschen Fassung.)
Georg Hamel: Elementare Mechanik. Leipzig, Berlin 1912, Kap. VII, §37, S. 302 f. (Hamel folgt der d’Alembertschen Fassung. Textarchiv – Internet Archive).
Georg Hamel, Theoretische Mechanik. 2. Auflage. Berlin, Heidelberg, New York 1967. Seite 118 f. und Seite 225.
Arnold Sommerfeld: Mechanik. Band I der Vorlesungen über Theoretische Physik. 8. Auflage. Thun, Frankfurt a. M. 1977, Kap. II §11, S. 54.